1. Chapter 2
Subgraphs, Paths, and Connected Graphs
2.1 Subgraphs and Spanning Subgraphs (Supergraphs)
Subgraph: Let H be a graph with vertex set V(H) and edge set E(H), and similarly
let G be a graph with vertex set V(G) and edge set E(G). Then, we say that H is a
subgraph of G if V(H) ( V(G) and E(H) ( E(G). In such a case, we also say that
G is a supergraph of H.
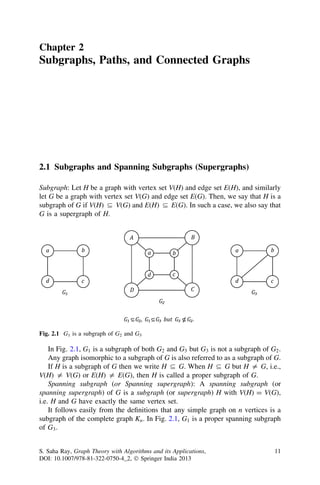
In Fig. 2.1, G1 is a subgraph of both G2 and G3 but G3 is not a subgraph of G2.
Any graph isomorphic to a subgraph of G is also referred to as a subgraph of G.
If H is a subgraph of G then we write H ( G. When H ( G but H = G, i.e.,
V(H) = V(G) or E(H) = E(G), then H is called a proper subgraph of G.
Spanning subgraph (or Spanning supergraph): A spanning subgraph (or
spanning supergraph) of G is a subgraph (or supergraph) H with V(H) = V(G),
i.e. H and G have exactly the same vertex set.
It follows easily from the definitions that any simple graph on n vertices is a
subgraph of the complete graph Kn. In Fig. 2.1, G1 is a proper spanning subgraph
of G3.
Fig. 2.1 G1 is a subgraph of G2 and G3
S. Saha Ray, Graph Theory with Algorithms and its Applications,
DOI: 10.1007/978-81-322-0750-4_2, Ó Springer India 2013
11
2. 2.2 Operations on Graphs
The union of two graphs G1 ¼ V1; E1ð Þ and G2 ¼ V2; E2ð Þ is another graph G3 ¼
V3; E3ð Þ denoted by G3 ¼ G1 [ G2, where vertex set V3 ¼ V1 [ V2 and the edge
set E3 ¼ E1 [ E2:
The intersection of two graphs G1 and G2 denoted by G1 G2 is a graph G4
consisting only of those vertices and edges that are in both G1 and G2.
The ring sum of two graphs G1 and G2, denoted by G1 È G2; is a graph
consisting of the vertex set V1 [ V2 and of edges that are either in G1 or G2; but
not in both.
Figure 2.2 shows union, intersection, and ring sum on two graphs G1 and G2:
Three operations are commutative, i.e.,
G1 [ G2 ¼ G2 [ G1; G1 G2 ¼ G2 G1; G1 È G2 ¼ G2 È G1
If G1 and G2 are edge disjoint, then G1 G2 is a null graph, and G1 È G2 ¼
G1 [ G2: If G1 and G2 are vertex disjoint, then G1 G2 is empty.
For any graph G, G G ¼ G [ G ¼ G and G È G = a null graph.
If g is a subgraph of G, i.e., g ( G, then G È g = G - g, and is called a
complement of g in G.
Fig. 2.2 Union, intersection, and ring sum of two graphs
12 2 Subgraphs, Paths and Connected Graphs
3. Decomposition: A graph G is said to be decomposed into two subgraphs G1 and
G2, if G1 [ G2 ¼ G and G1 G2 is a null graph.
Deletion: If vi is a vertex in graph G, then G À vi denotes a subgraph of
G obtained by deleting vi from G. Deletion of a vertex always implies the deletion
of all edges incident on that vertex. If ej is an edge in G, then G À ej is a subgraph
of G obtained by deleting ej from G. Deletion of an edge does not imply deletion
of its end vertices. Therefore, G À ej ¼ G È ej (Fig. 2.3).
Fusion: A pair of vertices a, b in a graph G are said to be fused if the two vertices
are replaced by a single new vertex such that every edge, that was incident on either
a or b or on both, is incident on the new vertex. Thus, fusion of two vertices does not
alter the number of edges, but reduces the number of vertices by one (Fig. 2.4).
Induced subgraph: A subgraph H G is an induced subgraph, if EH ¼
EG E VHð Þ: In this case, H is induced by its set VH of vertices. In an induced
subgraph H G; the set EH of edges consists of all e 2 EG, such that e 2 E VHð Þ:
To each nonempty subset A VG; there corresponds a unique induced subgraph
G½AŠ ¼ A; EG E Að Þð Þ (Fig. 2.5).
Fig. 2.3 Vertex deletion and edge deletion from a graph G
Fig. 2.4 Fusion of two vertices a and b
2.2 Operations on Graphs 13
4. Trivial graph: A graph G ¼ V; Eð Þ is trivial, if it has only one vertex. Otherwise
G is nontrivial.
Discrete graph: A graph is called discrete graph if EG ¼ /.
Stable: A subset X VG is stable, if G[X] is a discrete graph.
2.3 Walks, Trails, and Paths
Walk: A walk in a graph G is a finite sequence
W v0e1v1e2 Á Á Á vkÀ1ekvk
whose terms are alternately vertices and edges such that for 1 i k; the edge ei
has ends viÀ1 and vi.
Thus, each edge ei is immediately preceded and succeeded by the two vertices
with which it is incident. We say that W is a v0 À vk walk or a walk from v0 to vk:
Origin and terminus: The vertex v0 is the origin of the walk W, while vk is
called the terminus of W. v0 and vk need not be distinct.
The vertices v1; v2; . . .; vkÀ1 in the above walk W are called its internal vertices.
The integer k, the number of edges in the walk, is called the length of W, denoted
by Wj j.
In a walk W, there may be repetition of vertices and edges.
Trivial walk: A trivial walk is one containing no edge. Thus for any vertex v of
G, W : v gives a trivial walk. It has length 0.
Fig. 2.5 Spanning subgraph and induced subgraph of a graph G
14 2 Subgraphs, Paths and Connected Graphs
5. In Fig. 2.6, W1 v1e1v2e5v3e10v3e5v2e3v5 and W2 v1e1v2e1v1e1v2 are both
walks of length 5 and 3, respectively, from v1 to v5 and from v1 to v2 , respectively.
Given two vertices u and v of a graph G, a u–v walk is called closed or open,
depending on whether u = v or u = v.
Two walks W1 and W2 above are both open, while W3 v1v5v2v4v3v1 is closed
in Fig. 2.6.
Trail: If the edges e1; e2; . . .; ek of the walk W v0e1v1e2v2 Á Á Á Á Á Á ekvk are
distinct then W is called a trail. In other words, a trail is a walk in which no edge is
repeated. W1 and W2 are not trails, since for example e5 is repeated in W1, while e1
is repeated in W2. However, W3 is a trail.
Path: If the vertices v0; v1; . . .; vk of the walk W v0e1v1e2v2 Á Á Á ekvk are dis-
tinct then W is called a path. Clearly, any two paths with the same number of
vertices are isomorphic.
A path with n vertices will sometimes be denoted by Pn.
Note that Pn has length n - 1.
In other words, a path is a walk in which no vertex is repeated. Thus, in a path
no edge can be repeated either, so a every path is a trail. Not every trail is a path,
though. For example, W3 is not a path since v1 is repeated. However, W4
v2v4v3v5v1 is a path in the graph G as shown in Fig. 2.6.
2.4 Connected Graphs, Disconnected Graphs,
and Components
Connected vertices: A vertex u is said to be connected to a vertex v in a graph G if
there is a path in G from u to v.
Connected graph: A graph G is called connected if every two of its vertices are
connected.
Disconnected graph: A graph that is not connected is called disconnected.
Fig. 2.6 A graph with five vertices and ten edges
2.3 Walks, Trails, and Paths 15
6. It is easy to see that a disconnected graph consists of two or more connected
graphs. Each of these connected subgraphs is called a component. Figure 2.7
shows a disconnected graph with two components.
Theorem 2.1 A graph G is disconnected iff its vertex set V can be partitioned into
two non-empty, disjoint subsets V1 and V2 such that there exists no edge in G
whose one end vertex is in subset V1 and the other in subset V2.
Proof Suppose that such a partitioning exists. Consider two arbitrary vertices
a and b of G, such that a 2 V1 and b 2 V2: No path can exist between vertices
a and b; otherwise there would be at least one edge whose one end vertex would be
in V1 and the other in V2: Hence, if a partition exists, G is not connected.
Conversely, let G be a disconnected graph. Consider a vertex a in G. Let V1 be
the set of all vertices that are connected by paths to a. Since G is disconnected, V1
does not include all vertices of G. The remaining vertices will form a (non-empty)
set V2: No vertex in V1 is connected to any vertex in V2 by path. Hence the
partition exists. h
Theorem 2.2 If a graph (connected or disconnected) has exactly two vertices of
odd degree, there must be a path joined by these two vertices.
Proof Let G be a graph with all even vertices except vertices v1 and v2, which are
odd. From Handshaking lemma, which holds for every graph and therefore for
every component of a disconnected graph, no graph can have an odd number of
odd vertices. Therefore, in graph G, v1 and v2 must belong to the same component,
and hence there must be a path between them. h
Theorem 2.3 A simple graph with n vertices and k components can have at most
(n - k)(n - k ? 1)/2 edges.
Fig. 2.7 A disconnected graph with two components
16 2 Subgraphs, Paths and Connected Graphs
7. Proof Let the number of vertices in each of the k components of a graph G be
n1; n2; . . .; nk. Thus, we have
n1 þ n2 þ Á Á Á þ nk ¼ n
where ni ! 1 for i ¼ 1; 2; . . .; k:
Now,
Pk
i¼1 ni À 1ð Þ ¼ n À k
)
Pk
i¼1
ni À 1ð Þ
2
¼ n2
þ k2
À 2nk
) n1 À 1ð Þ þ n2 À 1ð Þ þ Á Á Á þ nk À 1ð Þ½ Š2
¼ n2
þ k2
À 2nk
)
Pk
i¼1
ni À 1ð Þ2
þ2
Pk
i;j¼1;i6¼j
ni À 1ð Þ nj À 1
À Á
¼ n2
þ k2
À 2nk
)
Pk
i¼1
nið Þ2
À2
Pk
i¼1
ni þ k þ 2
Pk
i;j¼1;i6¼j
ni À 1ð Þ nj À 1
À Á
¼ n2
þ k2
À 2nk
)
Pk
i¼1
n2
i À 2n þ k þ 2
Pk
i;j¼1;i6¼j
ni À 1ð Þ nj À 1
À Á
¼ n2
þ k2
À 2nk
)
Pn
i¼1
n2
i þ 2
Pk
i;j¼1;i6¼j
ni À 1ð Þ nj À 1
À Á
¼ n2
þ k2
À 2nk þ 2n À k:
Since each ni À 1ð Þ ! 0:
Xn
i¼1
n2
i n2
þ k2
À 2nk þ 2n À k ¼ n2
þ k k À 2nð Þ À k À 2nð Þ
¼ n2
À k À 1ð Þ 2n À kð Þ
Now, the maximum number of edges in the ith component of G is ni ni À 1ð Þ=2.
Since the maximum number of edges in a simple graph with n vertices is
n(n -1)/2 therefore, the maximum number of edges in G is
1
2
Pk
i¼1
ni ni À 1ð Þ ¼ 1
2
Pn
i¼1
n2
i À n
2
1
2 n2
À k À 1ð Þ 2n À kð Þ½ Š À n
2
¼ 1
2 n2
À 2nk þ 2n þ k2
À k À n½ Š
¼ 1
2 n À kð Þ2
þ n À kð Þ
h i
¼ 1
2 n À kð Þ n À k þ 1ð Þ h
2.5 Cycles
Cycle: A nontrivial closed trail in a graph G is called a cycle if its origin and
internal vertices are distinct. In detail, the closed trail
2.4 Connected Graphs, Disconnected Graphs, and Components 17
8. C v1v2 Á Á Á vnv1 is a cycle if
1. C has at least one edge and
2. v1; v2; . . .; vnare n distinct vertices.
k-Cycle: A cycle of length k; , i.e., with k edges, is called a k-cycle. A k-cycle is
called odd or even depending on whether k is odd or even.
Figure 2.8 cites C3; C4; C5; and C6. A 3-cycle is often called a triangle. Clearly,
any two cycles of the same length are isomorphic.
An n-cycle, i.e., a cycle with n vertices, will sometimes be denoted by Cn:
In Fig. 2.9, C v1v2v3v4v1; is a 4-cycle and T v1v2v5v3v4v5v1 is a non-trivial
closed trail which is not a cycle (because v5 occurs twice as an internal vertex) and
C0
v1v2v5v1 is a triangle.
Fig. 2.8 Cycles C3, C4, C5 and C6
Fig. 2.9 A graph containing
3-cycles and 4-cycles
18 2 Subgraphs, Paths and Connected Graphs
9. Note that, a loop is just a 1-cycle. Also, given parallel edges e1 and e2 in Fig. 2.10
with distinct end vertices v1 and v2; we can find the cycle v1e1v2e2v1 of length 2.
Conversely, the two edges of any cycle of length 2 are a pair of parallel edges.
Theorem 2.4 Given any two vertices u and v of a graph G, every u–v walk
contains a u–v path.
Proof We prove the statement by induction on the length l of a u–v walk W.
Basic step: l ¼ 0; having no edge, W consists of a single vertex (u = v). This
vertex is a u–v path of length 0.
Induction step: l ! 1: We suppose that the claim holds for walks of length less
than l: If W has no repeated vertex, then its vertices and edges form a u–v path. If
W has a repeated vertex w, then deleting the edges and vertices between appear-
ances of w (leaving one copy of w) yields a shorter u-v walk W0
contained in W.
By the induction hypothesis, W0
contains a u–v path P, and this path P is contained
in W (Fig. 2.11). This proves the theorem. h
Theorem 2.5 The minimum number of edges in a connected graph with n vertices
is n - 1.
Proof Let m be the number of edges of such a graph. We have to show m ! n À 1:
We prove this by method of induction on m. If m = 0 then obviously n = 1
(otherwise G will be disconnected). Clearly, then m ! n À 1: Let the result be true
for m ¼ 0; 1; 2; 3; . . .; k: We shall show that the result is true for m = k ? 1. Let
G be a graph with k ? 1 edges. Let e be an edge of G. Then the subgraph G - e has
Fig. 2.10 A 2-cycle
Fig. 2.11 A walk W and a shorter walk W0
of W containing a path P
2.5 Cycles 19
10. k edges and n number of vertices. If G - e is also connected then by our hypothesis
k ! n À 1, i.e., k þ 1 ! n [ n À 1.
If G - e is disconnected then it would have two connected components. Let the
two components have k1; k2 number of edges and n1; n2 number of vertices,
respectively. So, by our hypothesis, k1 ! n1 À 1 and k2 ! n2 À 1. These two imply
that k1 þ k2 ! n1 þ n2 À 2, i.e., k ! n À 2 (since, k1 þ k2 ¼ k; n1 þ n2 ¼ n), i.e.,
k þ 1 ! n À 1.
Thus, the result is true for m = k ? 1. h
Theorem 2.6 A graph G is bipartite if and only if it has no odd cycles.
Proof Necessary condition:
Let G be a bipartite graph with bipartition X; Yð Þ, i.e., V ¼ X [ Y:
For any cycle C : v1 ! v2 Á Á Á ! vkþ1 ¼ v1ð Þ of length k; v1 2 X ) v2 2 Y; v3 2
X ) v4 2 Y Á Á Á ) v2m 2 Y ) v2mþ1 2 X: Consequently, k þ 1 ¼ 2m þ 1 is odd
and k ¼ Cj j is even. Hence, G has no odd cycle.
Sufficient condition:
Suppose that, all the cycles in G are even, i.e., G be a graph with no odd cycle.
To show: G is a bipartite graph. It is sufficient to prove this theorem for the
connected graph only.
Let us assume that G is connected. Let v 2 G be an arbitrary chosen vertex.
Now, we define,
X ¼ x dG v; xð Þj is evenf g;
i.e., X is the set of all vertices x of G with the property that any shortest v À x path
of G has even length and Y ¼ y dG v; yð Þj is oddf g, i.e., Y is the set of all vertices y
of G with the property that any shortest v À y path of G has odd length.
Here,
dG u; vð Þ ¼ shortest distance from the vertex u to the vertex v
¼ min k : u !
k
v
n o
[If the graph G is connected then this shortest distance should be finite, i.e.,
dG u; vð Þ1 for 8u; v 2 G. Otherwise, G is disconnected]
Then clearly, since the graph G is connected V ¼ X [ Y and also by definition
of distance X Y ¼ ;.
Now, we show that V ¼ X [ Y is a bipartition of G by showing that any edge of
G must have one end vertex in X and another in Y:
Suppose that u; w 2 V Gð Þ are both either in X or in Y and they are adjacent.
Let P : v !
Ã
u and Q : v !
Ã
w be the two shortest paths from v to u and v to w,
respectively.
Let x be the last common vertex of the two shortest paths P and Q such that
P ¼ P1P2 and Q ¼ Q1Q2 where P2 : x !
Ã
u and Q2 : x !
Ã
w are independent
(Fig. 2.12).
20 2 Subgraphs, Paths and Connected Graphs
11. Since P and Q are shortest paths, therefore, P1 : v !
Ã
x and Q1 : v !
Ã
x are
shortest paths from v to x.
Consequently, P1j j ¼ Q1j j
Now consider the following two cases.
Case 1: u; w 2 X, then Pj j is even and Qj j is even (Also, P1j j ¼ Q1j j)
Case 2: u; w 2 Y, then Pj j is odd and Qj j is odd (Also, P1j j ¼ Q1j j)
Therefore, in either case, P2j j þ Q2j j must be even and so uw 62 E Gð Þ. Other-
wise, x !
Ã
u ! w !
Ã
x would be an odd cycle, which is a contradiction.
Therefore, X and Y are stable subsets of V: This implies X; Yð Þ is a bipartition
of G: Therefore, G½XŠ and G½YŠ are discrete induced subgraphs of G:
Hence, G is a bipartite graph.
If G is disconnected then each cycle of G will belong to any one of the
connected components of G say G1; G2; . . .; Gp.
If Gi is bipartite with bipartition Xi; Yið Þ; then X1 [ X2 [ X3 [ Á Á Á Á Á Á [ Xp;
À
Y1 [ Y2 [ Á Á Á Á Á Á [ YpÞ is a bipartition of G.
Hence, the disconnected graph G is bipartite. h
Exercises:
1. Show that the following two graphs are isomorphic (Fig. 2.13).
Fig. 2.13
Fig. 2.12 Two shortest paths P and Q
2.5 Cycles 21
12. 2. Check whether the following two graphs are isomorphic or not (Fig. 2.14).
Fig. 2.14
3. Show that the following graphs are isomorphic and each graph has the same
bipartition (Fig. 2.15).
Fig. 2.15
4. What is the difference between a closed trail and a cycle?
5. Are the following graphs isomorphic? (Fig. 2.16).
22 2 Subgraphs, Paths and Connected Graphs
13. Fig. 2.16
6. Prove that a simple graph having n number of vertices must be connected if it
has more than n À 1ð Þ n À 2ð Þ=2 edges.
7. Check whether the following two given graphs G1 and G2 are isomorphic or
not (Fig. 2.17).
Fig. 2.17
8. Prove that the number of edges in a bipartite graph with n vertices is at
most n2
=2ð Þ.
9. Prove that there exists no simple graph with five vertices having degree
sequence 4; 4; 4; 2; 2.
10. Find, if possible, a simple graph with five vertices having degree sequence
2; 3; 3; 3; 3.
11. If a simple regular graph has n vertices and 24 edges, find all possible values
of n:
2.5 Cycles 23
14. 12. If d Gð Þ and D Gð Þ be the minimum and maximum degrees of the vertices of a
graph G with n vertices and e edges, show that
d Gð Þ
2e
n
D Gð Þ
13. Show that the minimum number of edges in a simple graph with n vertices is
n À k; where k is the number of connected components of the graph.
14. Find the maximum number of edges in
(a) a simple graph with n vertices
(b) a bipartite graph with bipartition X; Yð Þ where Xj j ¼ m and Yj j ¼ n;
respectively.
24 2 Subgraphs, Paths and Connected Graphs