Ανάπτυξη συστήματος πρόβλεψης της εξέλιξης των μετρικών στατικής ανάλυσης πηγ...
perilipsi
1. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
ΠΕΡΙΛΗΨΗ
76
ΠΕΡΙΛΗΨΗ
Η παρούσα διπλωματική εντάσσεται στα πλαίσια της προσπάθειας που καταβάλλει το Εργαστήριο
Εργαλειομηχανών και Διαμορφωτική Μηχανολογίας του Αριστοτέλειου Πανεπιστημίου
Θεσσαλονίκης, για την ανάπτυξη λογισμικών για τον Off-line προγραμματισμό βιομηχανικών
ρομπότ.
Σκοπός της εργασία αυτής είναι η δημιουργία ενός προγράμματος μέσα από το οποίο ο χρήστης θα
μπορεί να αποθηκεύει τις επιθυμητές τροχιές που θέλει να εκτελέσει ο βιομηχανικός βραχίονας και
κατόπιν διαφόρων ελέγχων που εκτελεί το λογισμικό να εξάγει τoν κώδικα στην γλώσσα της
μηχανής ώστε να εκτελεστεί η αντίστοιχη κίνηση στην πραγματική μηχανή. Ο βιομηχανικός
βραχίονας που χρησιμοποιήθηκε είναι ο Kawasaki RS-005L που βρίσκεται στο εργαστήριο του
τμήματος Μηχανολόγων Μηχανικών του Τ.Ε.Ι. Κεντρικής Μακεδονίας στις Σέρρες.
Για την ανάπτυξη του συγκεκριμένου προγράμματος απαιτείται η ολοκλήρωση των παρακάτω
βημάτων:
1. Γραφική προσομοίωση βιομηχανικού ρομπότ.
Κατά την χρήση του προγράμματος, ο χρήστης έχει την δυνατότητα να βλέπει και την προσομοίωση
του ρομπότ της επιθυμητής θέση στην οποία βρίσκεται. Γι’ αυτό το λόγο απαιτείται η γραφική
προσομοίωση του. Για την επίτευξη της σωστής απεικόνισής του έγινε αρχικά η μέτρηση των
διαστάσεων του κάθε μέλους του ρομπότ όπως και των βοηθητικών στοιχείων. Για τον σχεδιασμό
του ρομπότ χρησιμοποιήθηκε το πρόγραμμα SolidWorks, όπου κάθε μέλος του ρομπότ σχεδιάστηκε
και αποθηκεύτηκε ξεχωριστά ως κομμάτι (part), και στη συνέχεια συναρμολογήθηκαν σε ένα τελικό
πρότζεκτ (assembly). Μέσω του συναρμολογημένου σχεδίου δίνεται η δυνατότητα της κίνησης σε
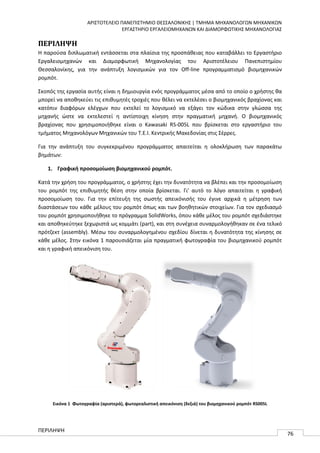
κάθε μέλος. Στην εικόνα 1 παρουσιάζεται μία πραγματική φωτογραφία του βιομηχανικού ρομπότ
και η γραφική απεικόνιση του.
Εικόνα 1 Φωτογραφία (αριστερά), φωτορεαλιστική απεικόνιση (δεξιά) του βιομηχανικού ρομπότ RS005L
2. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
ΠΕΡΙΛΗΨΗ
77
2. Κινηματική Ανάλυση βιομηχανικού βραχίονα.
Μετά την γραφική προσομοίωση του βραχίονα, για κάθε μέλος επιλέγεται ένα σύστημα
συντεταγμένων. Επίσης, ορίζεται ένα μητρώο μετασχηματισμού για κάθε μέλος μέσω του οποίου
προσδιορίζεται η θέση και ο προσανατολισμός κάθε μέλους ως προς τα άλλα μέλη, αλλά και ως
προς το ακίνητο σύστημα αναφοράς. Τα συστήματα συντεταγμένων εκλέγονται σύμφωνα με τη
μέθοδο του Denavit-Hartenberg. Με βάση αυτή τη μέθοδο, ο αριθμός των ανεξάρτητων
μεταβλητών του μητρώου μετασχηματισμού μειώνεται από έξι σε τέσσερις. Τα συστήματα
συντεταγμένων κατά τη μέθοδο Denavit-Hartenberg φαίνονται στην παρακάτω εικόνα.
Εικόνα 2 Συστήματα συντεταγμένων κατά D-H
3. Επίλυση ευθέως και αντίστροφου προβλήματος μέσω υπορουτινών του MATLAB.
Για την επίλυση του ευθέως προβλήματος τα δεδομένα που απαιτούνται είναι οι γωνίες της κάθε
άρθρωσης (θi, i=1,..,6) και μέσω υπολογισμών προκύπτει το ομογενές μητρώο με την θέση και τον
προσανατολισμό του άκρου ως προς το σταθερό σύστημα της βάσης.
Στην περίπτωση του αντίστροφου προβλήματός σαν δεδομένα εισόδου στις υπορουτίνες εισάγονται
η θέση και προσανατολισμός του άκρου για να εκτελέσει μία τροχιά. Προκύπτει ένα μη γραμμικό
σύστημα εξισώσεων με άγνωστες τις τιμές των γωνιών των αρθρώσεων. Για την επίλυση
χρησιμοποιείται μια αναλυτική μέθοδος, η οποία επιτρέπει τον προσδιορισμό όλων των λύσεων.
3. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
ΠΕΡΙΛΗΨΗ
78
Για την επίλυση των προβλημάτων χρησιμοποιήθηκε το πρόγραμμα του MATLAB. Ο πιο σημαντικός
λόγος που χρησιμοποιήθηκε το MATLAB είναι ότι το βασικό του στοιχείο είναι ο πίνακας. Στη
συνέχεια έγινε εξαγωγή των υπορουτινών σε μορφή DLL για την επικοινωνία με τα άλλα
προγράμματα. Το πλεονέκτημα που προσφέρει το MATLAB είναι ότι με την μετατροπή των
υπορουτινών σε DLL δεν απαιτείται στον υπολογιστή που θα εκτελεστεί το πρόγραμμα να είναι
εγκατεστημένο το πλήρες πρόγραμμα του MATLAB.
4. Ανάπτυξη του βασικού προγράμματος με την χρήση Visual Studio.
Μέσω του Visual Studio αναπτύχθηκε το βασικό τμήμα του προγράμματος, δηλαδή οι φόρμες τις
οποίες χειρίζεται ο προγραμματιστής του βιομηχανικού ρομπότ. Αυτές οι φόρμες περιέχουν μπάρες
κύλισης, κουμπιά και παράθυρα κειμένου μέσα από τα οποία ο χρήστης εισάγει δεδομένα όπως
είναι μία επιθυμητή θέση. Επίσης μέσω της βασικής φόρμας του προγράμματος ο χρήστης
ενημερώνεται για τις τιμές των αρθρώσεων όπως επίσης για τυχόν συγκρούσεις που μπορεί να
προκύψουν από την προγραμματισμένη τροχιά. Το πρόγραμμα δεν επιτρέπει στο χρήστη να
αποθηκεύσει σημεία τα οποία είναι εκτός ορίων ή θα προκαλέσουν σύγκρουση με το περιβάλλοντα
χώρο. Με αυτό τον τρόπο διασφαλίζεται η αποφυγή σφαλμάτων του κώδικα που θα εξαχθεί και θα
εκτελεστεί στο μηχάνημα. Το περιβάλλον λειτουργίας της προσομοίωσης παρουσιάζεται στην
παρακάτω εικόνα.
Εικόνα 3 Περιβάλλον προγράμματος προσομοίωσης
4. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
ΠΕΡΙΛΗΨΗ
79
5. Εφαρμογή.
Με την ολοκλήρωση στις ανάπτυξης του προγράμματος προσομοίωσης, είναι πλέον εφικτή η
αυτόματη δημιουργία NC κώδικα μέσω του Offline προγραμματισμού. Για την κατανόηση στις
λειτουργίας του προγράμματος και την σύγκριση στις πραγματική τροχιάς με αυτή στις
προσομοίωσης εκτελέστηκε μία εφαρμογή.
Η εφαρμογή πάνω στην οποία χρησιμοποιήθηκε το πρόγραμμα προσομοίωσης, αφορά την
μεταφορά στις ξύλινου κύβου πάνω σε μία ξύλινη βάση στην οποία είναι σχεδιασμένες θέσεις για
την τοποθέτηση αντικειμένων.
Αρχικά έγινε αποθήκευση των σημείων για την εκτέλεση στις επιθυμητής τροχιάς. Στη συνέχεια
εκτελείται μία προσομοίωση ολόκληρης στις τροχιάς για τον έλεγχο συγκρούσεων. Το επόμενο
βήμα είναι η εξαγωγή του κώδικα για την εκτέλεση στις ίδια τροχιάς από το πραγματικό ρομπότ. Με
την εξαγωγή του κώδικα ολοκληρώνεται η διαδικασία του Off-line προγραμματισμού. Για την
σύγκριση στις προσομοίωσης με την πραγματική τροχιά, ο κώδικας μεταφέρεται στη μονάδα
ελέγχου το ρομποτικού βραχίονα και εκτελείται. Στην εικόνα 4 γίνεται σύγκριση στις αντίστοιχης
θέσης του ρομπότ στις δύο περιπτώσεις.
Εικόνα 4 Θέση ρομπότ σε φωτογραφία (επάνω), και σε προσομοίωση (κάτω)
5. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
SUMMARY
80
SUMMARY
This diploma thesis is part of an effort made by the Laboratory for Machine Tools and Manufacturing
Engineering, Department of Mechanical Engineering, Aristotle University of Thessaloniki, to develop
programs for the Off-line programming of the industrials robots.
The main reason of this project is the creation of a programme through which the user will be able to
store the desired orbits he wants the industrial robot to perform and after several controls the
programme performs, to export the NC-code. The industrial robot which was used is Kawasaki
RS005L is found in the laboratory of the Department of the Mechanical Engineers of T.E.I in Serres.
Τhe achievement of the process requires the completion of the following steps:
1. Graphic Simulation of industrial robot.
During the use of the programme, the user is able to watch the simulation of the robot of the desired
position where it is found. That is why its graphic simulation is demanded. For its exact depiction, a
measurement of each part of the robot and its auxiliary elements was done. For the design of the
robot the programme SolidWorks was used, where every part of the robot was designed and saved
separately as a part. Afterwards, they were assembled into a final project (assembly). Through the
assembled design a capacity of movement of every part is available. In figure 1 a real picture of the
robot and its graphic simulation are presented.
Figure 1 Real picture (left), graphic simulation (right) of Kawasaki RS005L
6. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
SUMMARY
81
2. Kinematic Analysis.
After the graphic simulation of the arm, coordinate systems are chosen. A matrix for every part is
defined through which the position and the orientation of each part are determined. The coordinate
systems are chosen according to the Denavit-Hartenberg method. The advantage of this method is
that the number of the variables is reduced from six to four. The Denavit-Hartenberg coordinate
systems are shown below.
Figure 2 Kinematic Model
3. Forward and Inverse kinematic solution with MATLAB subroutines.
For the solution of the forward problem the angles of every joint are needed. Through certain
calculation the output is a homogeneous matrix through which we recognize the position and the
angle of every part in accordance to the fixed coordinate system of the base.
In the event of the inverse kinematic problem as data input are introduced the position and the
orientation of the tool, to perform the desired orbit. A nonlinear system of equations with unknown
rates of the angles of the joints comes out.
7. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
SUMMARY
82
For the solution the programme MATLAB was used because its basic element of calculation is the
matrix. For the cooperation with the other programs these MATLAB subroutines were exported as a
DLL file. The advantage of a MATLAB DLL file is that they can be used on every computer even if the
MATLAB is not installed.
4. Development of basic programme using Visual Studio.
Through the Visual Studio the basic part of the programme was developed, that is the forms which
the programmer of the industrial robot uses. These forms contain scroll bars, buttons and textboxes
which enable the user to manipulate the robot of the simulation. On the main form results such as
angle of joints and collision detection are appeared. The programme does not allow the user to store
either points which are out of limits or which may cause a collision. In this way the NC code which
will be exported is ready to be used.
Figure 3 Screenshot of the simulation programme
8. ΑΡΙΣΤΟΤΕΛΕΙΟ ΠΑΝΕΠΙΣΤΗΜΙΟ ΘΕΣΣΑΛΟΝΙΚΗΣ | ΤΜΗΜΑ ΜΗΧΑΝΟΛΟΓΩΝ ΜΗΧΑΝΙΚΩΝ
ΕΡΓΑΣΤΗΡΙΟ ΕΡΓΑΛΕΙΟΜΗΧΑΝΩΝ ΚΑΙ ΔΙΑΜΟΡΦΩΤΙΚΗΣ ΜΗΧΑΝΟΛΟΓΙΑΣ
SUMMARY
83
5. Practice.
With the completion of the simulation development the Off-line programming of the industrial robot
is now feasible. The practice on which the simulation programme was used is the transfer of a
wooden cube on a base.
Firstly the points of the desired orbit were stored. Secondly a simulation of the whole orbit was
performed to control collision. The next step was the export of the NC-code. That was the final step
of the off-line programme.
For the comparison of the simulation with the real orbit, the code was sent to the controller of the
industrial robot and it was performed.
Figure 4 Same positions both real robot and simulation