
Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Final project presentation
Similaire à Final project presentation (20)
Dernier
Dernier (20)
Final project presentation
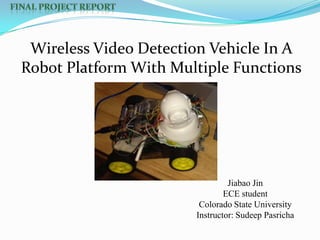
- 1. Wireless Video Detection Vehicle In A Robot Platform With Multiple Functions Jiabao Jin ECE student Colorado State University Instructor: Sudeep Pasricha
- 2. FINAL PROJECT REPORT Introduction This project proposed a mobile platform with video detection for a robot. This vehicle can transfer videos to a computer or a mobile device and also be controlled by wireless. The vehicle can avoid obstacles through its motion planning programs. The writer utilizes Arduino Mega 2560 as its microcontroller.
- 3. FINAL PROJECT REPORT Hardware Design Microcontroller - Arduino Mega 2560 It needs 6.5 V ~ 12 V power and at the same time it can produces 3.3 V and 5 V power supplying for other devices or sensors that are connected to it. There are 54 digital I/Os, fourteen of which can be used as PWM output and it is able to hold many devices. Therefore, it is exceedingly adaptive to build up a experiment platform. Otherwise, it has six interruptions that are I/O 2(interruption 0), 3(interruption 1), 18(interruption 2), 19(interruption 3), 20(interruption 4), 21(interruption 5) respectively.
- 4. FINAL PROJECT REPORT Hardware Design Wireless Camera
- 5. FINAL PROJECT REPORT Hardware Design Ultrasonic Distance-Detection Sensors I/O: VCC Trig Echo GND distance=(sound velocity * time high level lasting)/2.
- 6. FINAL PROJECT REPORT Hardware Design L298N Control Actuators Sensor Shield for Arduino
- 7. FINAL PROJECT REPORT Hardware Design Overall
- 8. FINAL PROJECT REPORT Software Design Firstly, if there is a human operation, the microcontroller will choose to execute it preferentially. Afterwards, it will judge if there are obstacles or cliff based on the returning values from the two ultrasonic distance detection sensors. If yes, it will execute to turn left or turn right or stop according to the parameter condition. If no, it forwards. In the situations without human`s control, it will turn right preferentially and then forward. There is no switch on the vehicle.
- 9. FINAL PROJECT REPORT Software Design Turning Directions volatile int condition = 0; void setup() { pinMode(31, OUTPUT); pinMode(32, OUTPUT); pinMode(33, OUTPUT); pinMode(34, OUTPUT); pinMode(48, INPUT); pinMode(49, INPUT); } void turn _left() { digitalWrite(33,HIGH); digitalWrite(34,HIGH); digitalWrite(31,LOW); digitalWrite(32,LOW); analogWrite(5,240); analogWrite(6,240); } Speed Differential Method void turn_ right() { digitalWrite(33,LOW); digitalWrite(34,LOW); digitalWrite(31,HIGH); digitalWrite(32,HIGH); analogWrite(5,240); analogWrite(6,240); } void stop() { digitalWrite(31,LOW); digitalWrite(32,LOW); digitalWrite(33,LOW); digitalWrite(34,LOW); analogWrite(5,0); analogWrite(6,0); } void forward() { digitalWrite(33,HIGH); digitalWrite(34,HIGH); digitalWrite(31,HIGH); digitalWrite(32,HIGH); analogWrite(5,250); analogWrite(6,250); } void loop() { if(digitalRead(2) == LOW || digitalRead(3) == LOW) { if(condition == 1) { turn _left(); } else if(condition == 2) { turn_ right(); } else { stop(); }} else { condition = 0; if(digitalRead(49) == 0) { forward(); } else { stop(); }}}
- 10. FINAL PROJECT REPORT Software Design Ultrasonic Distance Detection tan (90-a) =d/OA -0.1<=tan(90-a)-distance2/OA<=0.1 digitalWrite(41, LOW); digitalWrite(43, LOW); delayMicroseconds(2); digitalWrite(41, HIGH); digitalWrite(43, HIGH); delayMicroseconds(10); digitalWrite(40, LOW); digitalWrite(42, LOW); float distance1 = pulseIn(41, HIGH); float distance2 = pulseIn(43, HIGH); //record time distance1= distance1*170; distance2= distance2*170; //convert time to distances Serial.print(" distance1:"); Serial.print(" distance2:"); // output distances Serial.println(distance1); Serial.println(distance2); //show distances
- 11. FINAL PROJECT REPORT Testing Results The speed will not cause things on the vehicle fall down. To slow down the vehicle, it becomes a two-actuator one by setting both digitalWrite(32,LOW) and digitalWrite(34,LOW) permanently.
- 12. FINAL PROJECT REPORT Future Work Transplant the whole work to a flying platform. Transfer both audio and video concurrently and wirelessly. Conclusion In this final report, the I claim a wireless video-detection vehicle based on a mobile robot platform with different functions extended. The vehicle can transfer images to other mobile devices by wireless and also can be controlled remotely. Afterwards, I proposed the hardware design and software design of this vehicle and the platform. Finally, I talk about future work and some places that can be improved.
- 13. FINAL PROJECT REPORT References [1] Arduino, official website, http://www.arduino.cc/ [2] Kaicong Camera Forum, official website, http://www.kaicong.cc/forum.php [3] Robotic Fan, official website, http://www.roboticfan.com/ [4] SuperDroid Robots, official website, http://www.superdroidrobots.com/ [5] Chinese Arduino Community, official website, http://www.arduino123.com/ [6] McComb. G, Predko. M. Design and Implementation of Robot. Kexue Press. 2011. [7] Begnning Arduino Programming. Arduino official tutorial.