1. L.S Béchir el nabhéni -Page 1- Année 2006-2007
COMPORTEMENT DES MATERIAUX :
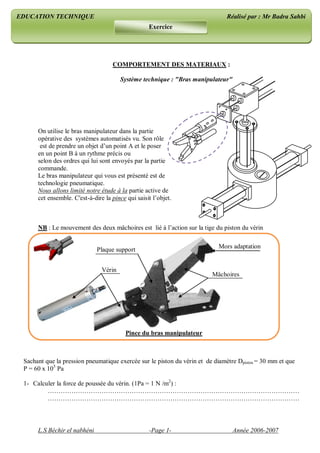
Système technique : "Bras manipulateur"
On utilise le bras manipulateur dans la partie
opérative des systèmes automatisés vu. Son rôle
est de prendre un objet d’un point A et le poser
en un point B à un rythme précis ou
selon des ordres qui lui sont envoyés par la partie
commande.
Le bras manipulateur qui vous est présenté est de
technologie pneumatique.
Nous allons limité notre étude à la partie active de
cet ensemble. C'est-à-dire la pince qui saisit l’objet.
NB : Le mouvement des deux mâchoires est lié à l’action sur la tige du piston du vérin
Sachant que la pression pneumatique exercée sur le piston du vérin et de diamètre Dpiston = 30 mm et que
P = 60 x 105
Pa
1- Calculer la force de poussée du vérin. (1Pa = 1 N /m2
) :
………………………………………………………………………………………………………
………………………………………………………………………………………………………
EDUCATION TECHNIQUE Réalisé par : Mr Badra Sahbi
Exercice
Vérin
Plaque support
Mâchoires
Mors adaptation
Pince du bras manipulateur
2. L.S Béchir el nabhéni -Page 2- Année 2006-2007
F
S
F
e
pe
R
R
S
Sachant que la tige du piston qui est sollicitée à la compression et un cylindre creux en acier de diamètre
intérieur dint = 10 mm et de limite élastique Re= 180 N/mm2
. On adoptera un coefficient de sécurité s = 3
2- Calculer le diamètre extérieur dext minimale de la tige du piston :
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………………………………………
……………………………………………………………………………
3- Calculer la variation de la longueur (Δl) sachant que la longueur initiale de la tige du piston L0 = 100 mm;
On donne E=2.105
N/mm2
(Module d’Young) :
…………………………………………………………………………………………............................
…………………………………………………………………………………………............................
…………………………………………………………………………………………............................
…………………………………………………………………………………………............................
……………………………………………………………………………………………………………
……..…………………………………………………………………….
<< COMPORTEMENT DES MATERIAUX >>
Contrainte Normale :
Condition de résistance :
σ ≤ Rpe avec :
Relation contrainte / déformation longitudinale :
σ = E ε c’est la loi de Hooke avec ε =
0
l
L
E : module d’élasticité longitudinale (ou module d’YOUNG) en (N/mm2
)
Choix dext = ……..
Δl = …………...
Tige du piston : Cylindre creux
Piston
en (N)
S en (mm2
) : Avec σ < 0 : dans le cas de la compression
en (N/mm2
)
Re : Résistance à la limite élastique
s : Cœfficient de sécurité ( 2 ≤ s ≤ 10 )
3. L.S Béchir el nabhéni -Page 3- Année 2006-2007
2 2
5. .(0,03)
. ' 60.10 . 4241.15 N
4 4
piston
P P
D
F P S avec S d ou F
2 2
int2 2
int
2 2 2 2
int int
4. .
( )
.( ) .
4
4. . 4. . 4.3.4241,15
: 10 13,78
. . .180
ext
p p pe e
extpe
ext e
p p
ext
e e
F F s FR R
R sig sig d d
d dS s s R
s F s F
d d d d AN d d mm
R R
2 20
0 int
0
2 2
5
.
.( )
. ( ; 13,78 )
4
4 . 4241,15
.100
.(13,78 10 )
: 0,03
2.10
p
ext
ext
F
L
L d dl SE l l avec S d mm
L E E
AN l l mm
Sachant que la pression pneumatique exercée sur le piston de diamètre Dpiston = 30 mm et P = 60 x 105
Pa
1- Calculer la force de poussée du vérin. (1Pa = 1 N /m2
) : (1 point)
Sachant que la tige du piston qui est sollicitée à la compression et un cylindre creux en acier de diamètre
intérieur dint = 10 mm et de limite élastique Re= 180 N/mm2
. On adoptera un coefficient de sécurité s = 3
2- Calculer le diamètre extérieur dext minimale de la tige du piston : (2 points)
3- Calculer la variation de la longueur (Δl) sachant que la longueur initiale de la tige du piston L0 = 100 mm;
On donne E=2.105
N/mm2
(Module d’Young) : (2 points)
Choix dext = 13,78 mm
Δl = 0,03 mm
Tige du piston : Cylindre creux
Piston