Recommandé

Recommandé
Contenu connexe
En vedette
En vedette (20)
Similaire à FYP_POSTER_PRESENTATION_ELECTRICAL
Similaire à FYP_POSTER_PRESENTATION_ELECTRICAL (20)
FYP_POSTER_PRESENTATION_ELECTRICAL
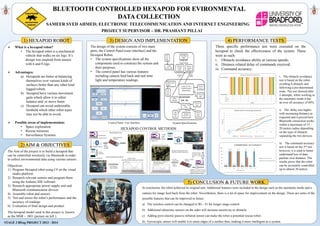
- 1. BLUETOOTH CONTROLLED HEXAPOD FOR EVIRONMENTAL DATA COLLECTION PROJECT SUPERVISOR – DR. PRASHANT PILLAI SAMEER SYED AHMED; ELECTRONIC TELECOMMUNICATION AND INTERNET ENGINEERING 1) HEXAPOD ROBOT What is a hexapod robot? • The hexapod robot is a mechanical vehicle that walks on six legs. It’s design was inspired from insects with 6 and 8 legs. Advantages: a) Hexapods are better at balancing themselves over various kinds of surfaces better than any other kind legged robots. b) Hexapod have various movement gaits which allow it to either balance and/ or move faster. c) Hexapod can avoid undesirable foothold which other robot types may not be able to avoid. Possible areas of implementation: • Space exploration • Rescue missions • Surveillance Systems STAGE 3 BEng PROJECT 2013 - 2014 Three specific performance test were executed on the hexapod to check the effectiveness of the system. These were as such: i. Obstacle avoidance ability at various speeds; ii. Distance related delay of commands received; iii. Command accuracy; i. The obstacle avoidance test is based on the robot avoiding 6 obstacle and following a pre-determined route. The test showed after 3 attempts, while working in the automatic mode it has an over all accuracy of 60%. ii. The delay was higher with increasing distance as expected and it proved how Bluetooth connection works within a maximum of 15 - 20 meters radius depending on the type of obstacle separating the two devices. iii. The command accuracy test is based on the 2nd test however, it is used to better understand loss of data packets over distance. The results prove that the robot can be accurately controlled up to almost 20 meters. In conclusion, the robot achieved its original aim. Additional features were included in the design such as the automatic mode and a camera for image feed back from the robot. Nevertheless, there is a lot of space for improvement on the design. These are some of the possible features that can be improved in future: a) The wireless control can be changed to Wi – Fi for longer range control. b) Additional ultrasonic sensors on the sides will increase sensitivity to obstacle. c) Adding pyro-electric passive infrared sensor can make the robot a potential rescue robot. d) Gyroscopic sensor will enable it to sense edges of a surface thus, making it more intelligent as a system. 5) CONCLUSION & FUTURE WORK The Aim of the project is to build a hexapod that can be controlled wirelessly via Bluetooth in order to collect environmental data using various sensors. Objectives: 1) Program Hexapod robot using C# on the visual studio platform 2) Research relevant sensors and program them using the Arduino IDE software 3) Research appropriate power supply unit and Bluetooth communication devices 4) Assemble robot and sensors 5) Test and assess the robot’s performance and the accuracy of readings 6) Evaluation of final design and product The hexapod model used in this project is known as the MSR – H01 (picture on left ). 2) AIM & OBJECTIVES 4) PERFORMANCE TESTS3) DESIGN AND IMPLEMENTATION Control Panel: User Interface The design of the system consists of two main parts, the Control Panel (user interface) and the Hexapod Robot. • The system specifications show all the components used to construct the system and their purposes. • The control panel has various features including camera feed back and real time light and temperature readings. System Specifications HEXAPOD CONTROL METHODS