Homemade GoTo mount for Telescopes using Nylon wheels, GT2 belts and 100:1 geared steper motors
•Télécharger en tant que PPTX, PDF•
0 j'aime•611 vues

https://www.youtube.com/watch?v=TkFqGm14_UQ

Recommandé
Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Homemade GoTo mount for Telescopes using Nylon wheels, GT2 belts and 100:1 geared steper motors
Similaire à Homemade GoTo mount for Telescopes using Nylon wheels, GT2 belts and 100:1 geared steper motors (20)
Dernier
Dernier (20)
Homemade GoTo mount for Telescopes using Nylon wheels, GT2 belts and 100:1 geared steper motors
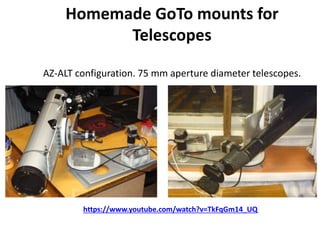
- 1. Homemade GoTo mounts for Telescopes AZ-ALT configuration. 75 mm aperture diameter telescopes. https://www.youtube.com/watch?v=TkFqGm14_UQ
- 2. Inspirations from DIY community Tobi Kurien: PiScope https://imgur.com/a/iOkCI?fbclid=IwAR0vT0_K wQd9wRi_EUAwkORrz8RaCseRzbo8HrgnmrJOc 76YQEzRVXJr9Mc Alu profiles, thrust bearings ,3D printed wheel:
- 3. Commercial
- 4. First tried to make GoTo from the Seben mount with steppers driving a 100:1 gearbox. Shaft rods 8 mm and 10mm flexed and had a huge backlash. Construction was very unstable and a decision was made to rebuild.
- 5. Mars observation with Seben scope Mars angular size 3.5″ – 25.1″ Screen width 0.2 degrees = 60 min/5= 112’ *60= 720’’ 640 pixels *3.5/720 =3 pixels 640 pixels *25/720 =22 pixels Mars was crossing the screen in one minute without tracking General tracking requirements: during one second 360/86400 = 0.0041667 degrees/s speed 360/86400*60 0.25 degree per minute We could see Mars with Logitech C610 webcam and Seben telescope. Image was very shaky because the telescope was standing on the wooden floor.
- 6. Stepper-Online Nema 17 motors with gearbox 100:1 are used. Motors without a gearbox do did not provide equal 0.1 degree steps and movements were jerky so that all mount was vibrating even with 16x microstepping. Nylon wheels are from a HomeDepo . One side was flattened on a lathe.
- 7. Motor turns a nylon wheel of 16cm (12cm) diameter via a GT2 belt 852mm (600mm) like in 3D printers. Nylon wheels are supported by 60mm diameter thrust bearings. Nylon wheels are toothless . Friction is enough to hold and provides frictional clutch. This worked out better than expected. Telescope motion is very smooth. Backlash < 0.1 degree.
- 8. Some parts…
- 9. Arduino Grbl shield for 3D printers and CNC control with G-code commands
- 10. //Telescope control with Arduino grbl shield. Written on Processing 2.2.1 import static javax.swing.JOptionPane.*; import java.awt.*; import processing.serial.*; Serial myPort; PFont f; float x, y; int z, now; String id; Button x1_btn, x2_btn, y1_btn, y2_btn, z1_btn, z2_btn, gtx_btn, gty_btn, setx_btn, sety_btn; void setup() {now = millis();f = createFont("Arial",16,true); printArray(Serial.list()); myPort = new Serial(this, Serial.list()[0], 115200); delay (3000); size (250, 300); smooth(); x1_btn = new Button("X-", 0, 100, 50, 50); x2_btn = new Button("X+", 50, 100, 50, 50); y1_btn = new Button("Y+", 100, 80, 50, 50); y2_btn = new Button("Y-", 100, 130, 50, 50); z1_btn = new Button("track",200,75, 50, 50); z2_btn = new Button("stop", 200, 125, 50, 50); gtx_btn = new Button("gotoX", 00, 0, 50, 50); gty_btn = new Button("gotoY", 100, 00, 50, 50); setx_btn = new Button("setX", 00, 200, 50, 50);sety_btn = new Button("setY", 100, 200, 50, 50); } void draw() {x1_btn.Draw(); x2_btn.Draw(); y1_btn.Draw();y2_btn.Draw();z1_btn.Draw(); gtx_btn.Draw();gty_btn.Draw();z2_btn.Draw(); setx_btn.Draw(); sety_btn.Draw(); if (millis() - now > 100) { now = millis(); if (z == 1) {myPort.write("g91 g1 x0.00041667 F0.25 n g91 g1 y-0.0002 F0.25 n");} myPort.write("?"); while (myPort.available() > 0) {String inBuffer = myPort.readString(); if (inBuffer != null) {print(inBuffer); fill(0); textFont(f,16); textAlign(LEFT); fill(175);rect(0,250, 250, 50); fill(0); text(inBuffer,-230,270);}}} } void mousePressed() { if (x1_btn.MouseIsOver()) {println(x); x--;myPort.write("g91 g1 x-1 F15 n");} if (x2_btn.MouseIsOver()) {println(x); x++; myPort.write("g91 g1 x1 F15 n");} if (y1_btn.MouseIsOver()) {println("y+");y--; myPort.write("g91 g1 y1 F15 n");} if (y2_btn.MouseIsOver()) {println("y-");y--; myPort.write("g91 g1 y-1 F15 n");} if (z1_btn.MouseIsOver()) {println("tracking");z=1;} if (z2_btn.MouseIsOver()) {println("stoped ");z=0;} if (gtx_btn.MouseIsOver()) {id = showInputDialog("GoTo X: "); if (id == null) id=""; println("GoToX:",id); myPort.write("g90 g1 x");myPort.write(id);myPort.write(" F150 n");} if (gty_btn.MouseIsOver()) {id = showInputDialog("GoTo Y: "); if (id == null) id=""; println("GoToY:",id); myPort.write("g90 g1 y");myPort.write(id);myPort.write(" F150 n");} if (setx_btn.MouseIsOver()) {id = showInputDialog("Set new global coordinate X: "); if (id == null) id=""; println("set X to: ",id); myPort.write("g92 x");myPort.write(id); myPort.write(13);} if (sety_btn.MouseIsOver()) {id = showInputDialog("Set new global coordinate Y: "); if (id == null) id=""; x=1;y=1;println("set Y to: ", id); myPort.write("g92 y");myPort.write(id); myPort.write(13);} } void keyPressed() { if (key == CODED) { if (keyCode == LEFT) {myPort.write("g91 g1 x-0.1 F15"); myPort.write(13); delay(100);} if (keyCode == RIGHT) {myPort.write("g91 g1 x0.1 F15"); myPort.write(13); delay(100);} if (keyCode == UP) {myPort.write("g91 g1 y0.1 F15"); myPort.write(13); delay(100);} if (keyCode == DOWN) {myPort.write("g91 g1 y-0.1 F15"); myPort.write(13); delay(100);} }} class Button {String label; float x, y, w, h; Button(String labelB, float xpos, float ypos, float widthB, float heightB) {label = labelB; x = xpos; y = ypos; w = widthB; h = heightB;} void Draw() { fill(218); stroke(141); rect(x, y, w, h, 10); textAlign(CENTER, CENTER); fill(0); text(label, x + (w / 2), y + (h / 2));} boolean MouseIsOver() {if (mouseX > x && mouseX < (x + w) && mouseY > y && mouseY < (y + h)) {return true; } return false; } } PC soft in Processing language • Buttons allow 1 degree incremental movements. • Keyboard arrow keys change angle by 0.1 degree. • Popup form allow to enter GoTo values • Popup form to enter coordinate value for calibration. • "Track" button starts slow motion 10 times/s for tracking celestial bodies.
- 11. Photo taken with an Android CATS30 phone 5Mpix camera Photo through the telescope using a Logitech HD webcam Test Location view from a window
- 12. From map triangle calculations skunu to Swedbank with a ruler horizontal displacement : 20.71 cm vert ical displacement : 1.57 cm hipothenuse: 20.8 cm Calculated the angle: arctan 4.34 degrees arccos 5.33 degrees arcsin 4.33 degrees Google maps coordinates: Swedbank sign 56.949329, 24.090011 Left corner of the building 56.949040, 24.089878 Right corner of the building 56.949481, 24.089934 Šķūņu street window 56.948627, 24.107615 Meter definition says from pole to equator is 10 000km. 90 degrees on globe is 10000 km Google maps coordinates: North East Left corner: 56.949040, 24.089878 Swedbank sign: 56.949329, 24.090011 Right corner: 56.949481, 24.089934 Šķūņu street window: 56.948627, 24.107615 Swedbank –Skunu = 0.000702deg, 0.017604deg=0.078km, 1.956km arctan(0.078/1.956) =2.28 degrees Something does not fit Test location distance and angle calculations from Google maps
- 13. Logitech C615 HD webcam is used. Logitech soft allows an electronic focus adjustment and exposure up to 2 seconds.
- 14. 0.1 degree horizontal displacement Seben telescope & Webcam Logitech C615
- 15. 40. Lens 75 mm diameter, 600 mm focus length In Russian search for: Подзорная труба USSR Monocular KOMZ Telescope ZRT-457 with two discrete-replaceable (fixed) 30x and 60x magnifications ЗРТ-457M Зрительная труба ЗРТ-452 КОМЗ 1957 г/в (г. Казань) Часть №1 ЗРТ-460М зрительная труба Монокулярная зрительная труба 40x Soviet marine 40 sigting scope
- 16. This scope is protected from dust and bugs. More suited for automated unatended observations than a regular telescope. Soviet marine 40 sigting scope GoTo mount and attached Webcam
- 17. Canon DSLR Popular in astrophotography allows to get long exposures and better signal to noise ratio.
- 18. View from the window with a Canon EOS 450D 55 mm objective
- 19. Canon EOS automatic control. Manufacturer soft.
- 20. Probably worse than optimal photo, because EOS camera fixing was shaky
- 21. Soviet 75 mm refractor and Canon EOS. C-mount camera adapter ring.
- 22. Canon EOS 5s exposure in a late evening
- 23. Canon EOS 60s exposure in a late evening
- 24. IRIS free soft to control Canon EOS and take many pictures