サマーセミナー2016: 機械学習入門と脳インターフェイスへの応用
•Download as PPTX, PDF•
0 likes•654 views

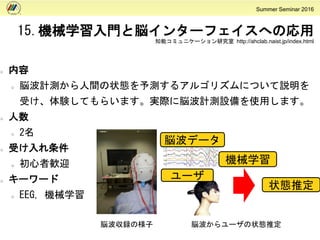
人工知能を支える技術である「機械学習」に入門し、データ解析・活用の方法を学びます。機械学習の応用例として、脳波計測を利用したインターフェースを作ります。

Recommended
More Related Content
More from 奈良先端大 情報科学研究科
More from 奈良先端大 情報科学研究科 (20)
Recently uploaded
Recently uploaded (8)
サマーセミナー2016: 機械学習入門と脳インターフェイスへの応用
- 1. Summer Seminar 2016 15.機械学習入門と脳インターフェイスへの応用 知能コミュニケーション研究室 http://ahclab.naist.jp/index.html 内容 脳波計測から人間の状態を予測するアルゴリズムについて説明を 受け、体験してもらいます。実際に脳波計測設備を使用します。 人数 2名 受け入れ条件 初心者歓迎 キーワード EEG, 機械学習 脳波収録の様子 ユーザ 脳波データ 脳波からユーザの状態推定 機械学習 状態推定