1. CAPÍTULO 1. ESTRUCTURAS ESTÁTICAMENTE DETERMINADAS.
1.1Introducción.
La mayoría de las estructuras actuales están diseñadas para soportar sólo
deformaciones pequeñas linealmente. Este es el caso de las estructuras
metálicas, en las que el material se comporta conforme a la ley de Hooke;
usualmente también se supone que las estructuras de concreto se deforman
linealmente.
Sin embargo, es posible que un miembro estructural recto fabricado con
un material que satisfaga la ley de Hooke se deforme no linealmente cuando es
sometido a una carga lateral y a una fuerza axial grande.
Es importante reconocer la diferencia fundamental entre las estructuras
estáticamente indeterminadas (hiperestáticas), en las que las fuerzas en estas
últimas no se pueden obtener únicamente a partir de las ecuaciones de
equilibrio estático: también se requiere conocer algunas de las condiciones
geométricas bajo carga.
El análisis de estructuras estáticamente indeterminadas, generalmente
requiere la solución de ecuaciones lineales simultáneas, cuyo número depende
del método de análisis.
(a)
(b)
(c)
(d)
ANALISIS ESTRUCTURAL 1
2. (e)
(f)
(g)
(h)
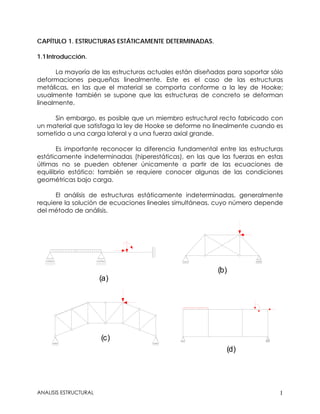
Figura 1-1. Ejemplos de estructuras reticuladas. (a) Viga continua.
(b) y (c) Amaduras planas. (d) y (e) Marcos planos. (f) Marco tridimensional
(g) Armadura tridimensional. (h) Retícula horizontal sometida a cargas
verticales.
1.2Equilibrio de un cuerpo.
En la figura 1-2a se representa un cuerpo sometido a fuerzas F1, F2,…, Fn en
el espacio. En este contexto, el término fuerza significa, ya sea la acción de una
carga concentrada, o un par de fuerzas, (un momento); en este último caso, el
momento es representado por una flecha de doble cabeza. Una fuerza típica Fi
actuando en un punto con coordenadas (xi, yi, zi) se muestra en la figura 1-2b
empleando el sistema de mano derecha de ejes ortogonales x, y, y z. Las
componentes de Fi en la dirección de los ejes de la fuerza son:
ix
i
ix F
F λ
= iy
i
iy F
F λ
= iz
i
iz F
F λ
= (1-1)
Donde Fi es la magnitud de la fuerza (valor absoluto); ix
λ , iy
λ y iz
λ se
conocen como cosenos directores de la fuerza Fi, y son iguales al coseno de los
ángulos α, β y γ entre la fuerza y las direcciones positivas de x, y, y z,
respectivamente.
ANALISIS ESTRUCTURAL 2
3. (x
iy
F
(b)
i y
i ,
, i
z
i )
ix
F
i
F
β
γ
α
y
My
x
z
Mz
Mx
0
F
1
F
3
F
2
F
y x
z
(a)
Figura 1-2. S
istema de fuerzas y componentes de las fuerzas. (a) Cuerpo
sometido a fuerzas en el espacio. (b) Componentes de una fuerza típica y
convención de signos positivos para Mx, My y Mz.
iz
F
El momento de una carga concentrada Fi con respecto a los ejes x, y, y z
(figura 1-2b) es igual a la suma de momentos de las componentes Fix, Fiy y Fiz; por
lo tanto,
i
iy
i
iz
ix z
F
y
F
M −
= i
iz
i
ix
iy x
F
z
F
M −
= i
ix
i
iy
iz y
F
x
F
M −
= (1-2)
Para un cuerpo en equilibrio, las componentes de la resultante en las
direcciones x, y, y z deben anularse de tal forma que se aplican las siguientes
ecuaciones:
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
=
=
=
=
=
∑
∑
∑
∑
∑
∑
0
0
0
0
0
0
z
y
x
z
y
x
M
M
M
F
F
F
(1-3)
Cuando todas las fuerzas que actúan sobre el cuerpo libre se aplican en
un plano, únicamente tres de las seis ecuaciones de equilibrio resultan
significativas. Por ejemplo, cuando las fuerzas actúan en el plano x – y, estas
ecuaciones son:
∑ = 0
x
F ∑ = 0
y
F ∑ = 0
z
M (1-4)
Cuando una estructura en equilibrio está constituida por varios miembros,
se deben satisfacer las ecuaciones de equilibrio al aplicarse a la estructura
como un todo. Cada miembro, nudo o parte de la estructura se encuentra
también equilibrio y las ecuaciones de la estática también se deberían
satisfacer.
ANALISIS ESTRUCTURAL 3
4. Las ecuaciones de equilibrio 1-3 y 1-4 se pueden emplear para determinar
las componentes de las reacciones o las fuerzas internas siempre y cuando el
número de incógnitas no exceda el número de ecuaciones. En el caso de
armaduras con miembros articulados y fuerzas aplicadas únicamente en los
nudos, los miembros están sometidos a fuerzas axiales exclusivamente; por lo
tanto, para un nudo de la armadura, las ecuaciones que expresan equilibrio de
momentos incluidas en las ecuaciones 1-3 y 1-4 se anulan pero se pueden
aplicar a una parte de la armadura para determinar las fuerzas en los
miembros.
Ejemplo 1-1. El elemento prismático en voladizo mostrado en la figura está
sometido, en el plano de la sección transversal de su extremo libre, a las fuerzas
F1 = P, F2 = 2Pb, como se muestra en la misma. Determine las componentes en
O de la reacción resultante en el extremo empotrado; el punto O es el centro
de la sección transversal.
b
3b
1.5b
1
F1 = P
F2= 2Pb
y
z
x
30°
Supóngase que las direcciones positivas de las componentes de la
reacción son las mismas que las correspondientes a los ejes x, y, y z. Las
coordenadas del punto de aplicación de F1 son (3b, 0.5b, -0.75b). Los cosenos
directores de F1 son { }
866
.
0
,
5
.
0
,
0
,
, 1
1
1 =
z
y
x λ
λ
λ
Al aplicar las ecuaciones 1-1 y 1-2, se obtiene { } { }
866
.
0
,
5
.
0
,
0
,
, 1
1
1 P
F
F
F z
y
x =
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
−
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
×
×
−
−
×
−
×
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
500
.
1
598
.
2
808
.
0
3
5
.
0
3
866
.
0
)
75
.
0
(
5
.
0
5
.
0
866
.
0
1
1
1
Pb
Pb
M
M
M
z
y
x
ANALISIS ESTRUCTURAL 4
5. El momento aplicado F2 sólo tiene una componente: M2y = -2Pb. Las
ecuaciones de equilibrio 1-3 proporcionan las componentes de reacción en el
punto O:
{ } { }
866
.
0
,
5
.
0
,
0
,
, −
−
= P
F
F
F Oz
Oy
Ox
{ } { }
5
.
1
,
598
.
4
,
808
.
0
,
, −
−
= Pb
M
M
M Oz
Oy
Ox
Observe que las reacciones no varían si la flecha de doble cabeza, que
representa el momento F2 en la figura 1-3a, se desplaza a otra posición sin
ningún cambio de dirección.
Ejemplo 1-2. Determine las componentes de la reacción para el marco plano
que se muestra en la figura.
R
1
= -2P
R
3
= -3.2P
4P
A
B
C
D
E
F
P
2P
y
x
z
2b
2b
2b
b
b
Seleccione los ejes x, y, y z como se muestra y aplique la ecuación 1-4:
∑ = 0
x
F 0
2
1 =
+ P
R
∑ = 0
z
M 0
)
(
2
)
2
(
4
)
5
(
)
5
(
2
1 =
+
−
−
+
− b
P
b
P
b
P
b
R
b
R
∑ = 0
y
F 0
4
3
2 =
+
+
−
− P
P
R
R
La primera de las tres ecuaciones anteriores proporciona el valor de R1, el
cual, al sustituirse en la segunda ecuación, permite la determinación de R2. Al
sustituir R2 en la tercera ecuación, se obtiene R3. Las respuestas son: ;
2
1 P
R −
=
;
8
.
1
2 P
R = .
2
.
3
3 P
R =
En este problema, podemos verificar que ∑ = 0
z
M con el eje z en un punto
diferente, por ejemplo en el punto A. Nótese que con esto no se obtiene una
cuarta ecuación que se podría usar para determinar una cuarta incógnita; ello
se debe a que la cuarta ecuación se puede derivar a partir de las otras tres.
ANALISIS ESTRUCTURAL 5
6. 1.3Fuerzas internas: convención de signos y diagramas.
La finalidad de un análisis estructural es poder determinar las reacciones
en los apoyos así como las fuerzas internas (las resultantes de los esfuerzos) en
cualquier sección. En vigas y marcos planos en los cuales todas las fuerzas en la
estructura están en un solo plano, la resultante de los esfuerzos en cualquier
sección tiene generalmente tres componentes: una fuerza axial N, una fuerza
cortante V y un momento flexionante M. Las direcciones positivas de N, V y M se
muestran en la figura 1-3a.
Las variaciones de N, V y M a lo largo del miembro se presentan
gráficamente en lo diagramas de fuerza axial, fuerza cortante y momento
flexionante, respectivamente, que se presentan en la figura 1-3b. Las fuerzas N y
V positivas se dibujan hacia arriba, mientras que el momento M positivo se traza
hacia abajo.
N N
V
V
M M
(a)
P
A G
C
N
A G B C
P
V
7P/3
A
G
H B C
Pb
M
(b)
Figura 1.3. (a) Valores positivos de N, V y M. (b) Diagramas de fuerzas
axial, fuerza cortante y momento flexionante.
2Pb
4Pb/3
ANALISIS ESTRUCTURAL 6
7. Tarea. Obtenga los diagramas de fuerza cortante y de momento flexionante
para las vigas y marcos estáticamente determinados que se muestran en la
figura del problema 1-4.
A
B C D
0.4L 0.6L 0.2L
qL 0.2qL
q por unidad
de longitud
(a)
A
B C
D
90°
L
L
P
P
(b)
(e)
A
B
C
D
E
F G
0.2L
L/2 L/2
L/5 L/5
L/2
3L/8
qL/4 qL/4
Carga total en BCD = qL
L
(f)
L/2
A
B
Carga total
sobre AB= qL
L L
L
0.6L
0.2L
0.2L
0.5L 0.5L
A
B
C
D
F E
G
0.3qL
Carga uniforme
q/ unidad de longitud
(c)
4@ L= 4L
3L/2
L
Carga total
sobre FG = 2P
A
B
D
F
G
C E
P
P
P
P
P
(g)
L
0.15L
1
3
1
3
A
B
C
D
(d)
L L
L/2
A B
C
x
y
Vista en planta de una
viga en voladizo horizontal
sometida a su peso
propio q por unidad de longitud
(h)
ANALISIS ESTRUCTURAL 7
8. CAPÍTULO 2. INTRODUCCIÓN AL ANÁLISIS DE ESTRUCTURAS ESTÁTICAMENTE
INDETERMINADAS.
2.1 Indeterminación estática.
La indeterminación de una estructura puede ser externa, interna o de
ambos tipos. Se dice que una estructura es indeterminada externamente si el
número de componentes de reacción excede el número de ecuaciones de
equilibrio. Por lo tanto, una estructura tridimensional es, en general, externa y
estáticamente indeterminada cuando el número de componentes de reacción
es mayor de seis. En una estructura plana, el número correspondiente es de tres.
Cada una de las vigas de las figuras 2-1 a y b tiene cuatro componentes de
reacción. Como sólo hay tres ecuaciones de equilibrio estático, se tiene una
fuerza desconocida en exceso a aquellas que se pueden encontrar por
estática, por lo que las vigas son externas y estáticamente indeterminadas. Se
define el grado de indeterminación como el número de fuerzas desconocidas
que excede el de las ecuaciones de la estática. Por lo tanto, las vigas de las
figuras 2-1 a y b son indeterminadas en primer grado.
Algunas estructuras se construyen de tal modo que el esfuerzo resultante
en una sección determinada sea cero. Esto proporciona una ecuación
adicional de equilibrio estático permite la determinación de una componente
adicional de reacción. Por ejemplo, el marco de tres articulaciones de la figura
2-1c tiene cuatro componentes de reacción, pero el momento flexionante en la
articulación central debe ser nulo. Esta condición, junto con las tres ecuaciones
de equilibrio aplicadas a la estructura como cuerpo libre, es suficiente para
determinar las cuatro componentes de reacción.
R
1
R2
R
3 R
4
(a)
R
2
R
1
R
3
(b)
R
1
R
2 R3
(c)
Figura 2-1. (a), (b) Estructuras externa y estáticamente indeterminadas.
(c) Marco de tres articulaciones estáticamente determinado.
R
4
ANALISIS ESTRUCTURAL 8
9. Considérense ahora las estructuras que son externa y estáticamente
determinadas, pero internamente indeterminadas. Por ejemplo, en la armadura
de la figura 2-2a, las fuerzas en los miembros no se pueden determinar
solamente con las ecuaciones de la estática. Si se retira (o se corta) uno de los
dos miembros diagonales, las fuerzas en los miembros se pueden calcular con
las ecuaciones de la estática. De ahí que la armadura sea internamente
indeterminada en primer grado, aunque sea externamente determinada. El
marco de la figura 2-2b es internamente indeterminado en tercer grado: se
convierte en determinado si se hace un corte en uno de los miembros (figura 2-
2c). El corte representa la eliminación o liberación de tres resultantes esfuerzo:
fuerza axial, fuerza cortante y momento flexionante. El número de liberaciones
necesarias para hacer una estructura estáticamente determinada representa el
grado de indeterminación. El mismo marco se convierte en determinado si las
liberaciones se efectúan introduciendo tres articulaciones como se muestra en
la figura 2-2d, eliminando así el momento flexionante en tres secciones.
R
2 R
3
Figura 2-2. Estructuras interna y estáticamente indeterminadas.
R
1
(a)
R
2
R
1
R
3
(b)
R
2
R
1
R
3
(c)
R
2
R
1
R
3
(d)
Las estructuras pueden ser estáticamente indeterminadas tanto interna
como externamente. El marco de la figura 2-3 es externamente indeterminado
en primer grado, pero las resultantes de esfuerzos no se pueden determinar por
estática aun suponiendo que se hayan encontrado previamente las
reacciones.
ANALISIS ESTRUCTURAL 9
10. R
2
R4
Figura 2-3. Marco que es estáticamente indeterminado
tanto externa como internamente.
R
1
R3
El marco tridimensional de la figura 2-4 tiene seis componentes de
reacción en cada apoyo: tres componentes X, Y, y Z y tres momentos Mx, My y
Mz. Para evitar congestionar la figura, las seis componentes se muestran sólo en
uno de los cuatro apoyos. Los vectores de momentos se indican con flechas de
doble cabeza. Por lo tanto, el número de componentes de reacción de la
estructura es 24, mientras que el número de ecuaciones de equilibrio que se
pueden escribir es seis. Entonces, el marco es externamente indeterminado en
18°.
x
z
y
Figura 2-4. Marco tridimensional con nudos rígidos.
Y
X
Z
M
y
M
z
M
x
ANALISIS ESTRUCTURAL 10
11. 2.2 Expresiones para el grado de indeterminación.
Una armadura plana con tres componentes de reacción, m miembros y j
nudos articulados (incluyendo los apoyos, que también están articulados). Las
fuerzas desconocidas son las tres componentes de reacción y la fuerza en cada
miembro, en total, 3 + m. Por otra parte, se pueden escribir dos ecuaciones de
equilibrio en cada nudo:
∑ = 0
x
F ∑ = 0
y
F (2-1)
Siendo la sumatoria para las componentes de todas las fuerzas externas e
internas que coinciden en el nudo. De ahí que el número total de ecuaciones
es 2j.
Para la determinación estática, el número de ecuaciones de la estática
es igual al número de incógnitas, es decir:
3
2 +
= m
j (2-2)
Siempre que la estructura sea estable, se puede hacer cierto intercambio
entre el número de miembros y el número de componentes de reacción r, de
modo que para la determinación total se satisfaga la condición:
r
m
j +
=
2 (2-3)
Entonces, el grado de indeterminación es:
j
r
m
i 2
)
( −
+
= (2-4)
Para la armadura que se ilustra en la figura 2-5, ,
4
=
r y . Por lo
tanto .
18
=
m 10
=
j
2
=
i
R
1
R
2
R
4
Figura 2-5. Armadura plana estáticamente indeterminada.
R
3
ANALISIS ESTRUCTURAL 11
12. En el caso de un marco tridimensional con nudos articulados se pueden
escribir tres ecuaciones de equilibrio, a saber:
∑ = 0
x
F ∑ = 0
y
F ∑ = 0
z
F (2-5)
Siendo otra vez la sumatoria de todas las fuerzas internas y externas que
coinciden en el nudo. El número total de ecuaciones es 3j, y la condición de
determinación es:
r
m
j +
=
3 (2-6)
El grado de indeterminación es:
j
r
m
i 3
)
( −
+
= (2-7)
Un marco plano con nudos rígidos des estáticamente determinado sí:
r
m
j +
= 3
3 (2-8)
y el grado de indeterminación es:
j
r
m
i 3
)
3
( −
+
= (2-9)
En estas ecuaciones, j es el número total de nudos rígidos, incluyendo los
apoyos, y m es el número de miembros.
Un marco tridimensional es estáticamente determinado sí:
r
m
j +
= 6
6 (2-10)
y el grado de indeterminación es:
( ) j
r
m
i 6
6 −
+
= (2-11)
Aplicado la ecuación 2-11 al marco de la figura 2-4, se tiene que ,
8
=
m
24
=
r y . Según la ecuación 2-11,
8
=
j 24
=
i .
ANALISIS ESTRUCTURAL 12
13. 2.3 Métodos generales de análisis de estructuras estáticamente indeterminadas.
La finalidad del análisis de las estructuras es determinar las fuerzas
externas (componentes de reacción) y las fuerzas internas (resultantes de
esfuerzos). Las fuerzas deben satisfacer las condiciones de equilibrio y producir
deformaciones compatibles con la continuidad de la estructura y las
condiciones de apoyo. Como ya se ha visto, las ecuaciones de equilibrio no son
suficientes para determinar las fuerzas desconocidas en una estructura
estáticamente indeterminada y es necesario complementarlas con relaciones
geométricas simples entre las deformaciones de la estructura. Con estas
relaciones se asegura la compatibilidad de las deformaciones con la geometría
de la estructura y se conocen como condiciones geométricas o condiciones de
compatibilidad. Un ejemplo de dichas condiciones es que en un apoyo
intermedio de una viga continua no puede haber deflexión la rotación es igual
en ambos lados del apoyo.
Se pueden usar dos métodos generales de estudio. El primero es el
método de las fuerzas de flexibilidad, en que se proporcionan suficientes
liberaciones para convertir la estructura en estáticamente determinada. La
estructura liberada sufre deformaciones inconsistentes, y la inconsistencia
geométrica se corrige posteriormente mediante la aplicación de fuerzas
adicionales.
El segundo enfoque es el método de los desplazamientos o de rigidez. En
este método se agregan restricciones para impedir el movimiento de los nudos
y se determinan las fuerzas necesarias para producir la restricción. Después se
permite que tengan lugar desplazamientos de los nudos hasta que hayan
desaparecido las fuerzas ficticias de restricción. Conociendo los
desplazamientos en el nodo, se determinan las fuerzas en la estructura por
superposición de los efectos de los desplazamientos separados.
Se puede usar indistintamente el método de las fuerzas o el de los
desplazamientos para analizar cualquier tipo de estructura. En el método de las
fuerzas, se obtienen las fuerzas necesarias para restablecer la consistencia
geométrica, el análisis generalmente comprende la solución de un número de
ecuaciones simultáneas igual al número de fuerzas desconocidas, es decir, el
número de liberaciones que se necesiten para convertir a la estructura en
estáticamente determinada. Las incógnitas en el método de los
desplazamientos son las posibles traslaciones y rotaciones de los nudos. La
cantidad de fuerzas de restricción que se que se deben agregar a la estructura
es igual al número de posibles desplazamientos de los nudos. Esto representa
otro tipo de indeterminación, que se puede designar como indeterminación
cinemática y se describe en la siguiente sección.
ANALISIS ESTRUCTURAL 13
14. 2.4 Indeterminación cinemática.
Cuando una estructura constituida por varios miembros se somete a
cargas, los nudos sufren desplazamientos en forma de rotación y traslación. En
el método de análisis por desplazamiento, las magnitudes desconocidas son la
rotación y la traslación de los nudos.
En un apoyo se conocen una o más de las componentes del
desplazamiento. Por ejemplo, la viga continua de la figura 2-6 está empotrada
en C y tiene apoyos con rodillos en A y B. La fijación en C impide cualquier
desplazamiento en ese extremo, mientras que los apoyos con rodillos en A y B
evitan la traslación en dirección vertical pero permiten la rotación. Se debe
mencionar que se supone que los apoyos con rodillos pueden resistir tanto
fuerzas descendentes como ascendentes.
A B C
D
1
D2
Figura 2-6. Indeterminación cinemática de una viga continua.
Si se supone que la rigidez axial de la viga es tan alta que se puede
despreciar el cambio de longitud debido a fuerzas axiales, no habrá
desplazamientos horizontales en A o en B. Por lo tanto, los únicos
desplazamientos desconocidos en los nodos serán las rotaciones D1 y D2 en A y
B, respectivamente (figura 2-6). Los desplazamientos D1 y D2 son independientes
uno del otro, ya que a cualquiera de ellos se le puede asignar un valor arbitrario
mediante la introducción de fuerzas apropiadas.
A un sistema de desplazamiento de nudos se le denomina independiente
si cada desplazamiento se puede variar arbitraria e independiente de todos los
demás. Al número de desplazamientos independientes de nudos de una
estructura se le conoce como grado de indeterminación cinemática o número
de grados de libertad. Este número es una suma de los grados de libertad en
rotación y en traslación. Algunas veces, a esta última se le conoce como
libertad de desplazamiento lateral.
El marco plano de la figura 2-7 es otro ejemplo de una estructura
cinemática indeterminada. Si se desprecia la deformación axial, el grado de
indeterminación cinemática es de dos, siendo los desplazamientos
desconocidos de los nudos las rotaciones en A y en B.
ANALISIS ESTRUCTURAL 14
15. A B C
D
P
D2
D
1
Figura 2-7. Indeterminación cinemática de un marco
plano con nudos rigidos.
Hay que destacar que la indeterminación cinemática y la
indeterminación estática no se deben confundir una con la otra. Por ejemplo, el
marco de la figura 2-7 tiene siete componentes de reacción y es estáticamente
indeterminado en cuarto grado. Si se sustituye el apoyo fijo en D por una
articulación, se reducirá en uno el grado de indeterminación estática, pero al
mismo tiempo se hace posible que ocurra rotación en D, aumentándose de
este modo el grado de indeterminación cinemática en uno. En general, la
introducción de una liberación disminuye el grado de indeterminación estática
y aumenta el grado de indeterminación cinemática. Por esta razón, cuanto
más alto sea el grado de indeterminación estática, más adecuado será el
método de desplazamiento para el análisis de la estructura.
En el caso de una armadura con nudos articulados en el que todas la
fuerzas están aplicadas en los nudos, los miembros están sometidos sólo a una
carga axial (sin momentos flexionantes ni esfuerzos cortantes) y, por lo tanto,
permanecen rectos. La configuración deformada de una armadura plana se
define completamente si se determinan las componentes de la traslación en
dos direcciones ortogonales para cada nudo, y cada nudo, que no sea un
apoyo, tiene dos grados de libertad.
Considérese el marco de la figura 2-8. Tiene ocho nudos, de los cuales
cuatro están empotrados en el espacio. Cada uno de los nudos A, B, C y D
puede tener seis desplazamientos como los que se muestran en A. Por lo tanto,
el grado de indeterminación cinemática del marco es 24
6
4 =
× .
ANALISIS ESTRUCTURAL 15
16. B
D
P
C
A
D
D
D
D
D D
6
3
1 4
5
2
x
z
y
Figura 2-8. Indeterminación cinemática de un marco
tridimensional con nudos rigidos.
Si se toman en cuenta las deformaciones axiales, las longitudes de las
cuatro columnas permanecen inalteradas, por lo que se anula la componente
D3 de traslación en la dirección vertical, reduciendo así en cuatro los
desplazamientos desconocidos. Además, como no cambian las longitudes de
los miembros horizontales, las traslaciones horizontales en la dirección x de los
nudos A y D son iguales; lo mismo ocurre en los nudos B y C. En la misma forma,
las traslaciones en la dirección y de los nudos A y B son iguales; de nueva
cuenta ocurre lo mismo para los nodos C y D. con todo esto se reducen en
cuatro los desplazamientos desconocidos. Por lo tanto, el grado de
indeterminación cinemática del marco de la figura 2-8, sin deformación axial,
es 16.
2.5 Principio de superposición.
Se mencionó que cuando las deformaciones de una estructura son
proporcionales a las cargas aplicadas, es válido el principio de superposición.
Este principio establece que el desplazamiento debido a varias fuerzas que
actúen simultáneamente es igual a la suma de los desplazamientos
ocasionados por cada fuerza actuando separadamente.
En el análisis de estructuras, es conveniente usar una notación en que una
fuerza Fj produce en un punto i un desplazamiento Dij. Por lo tanto, el primer
subíndice de un desplazamiento describe la posición y dirección del
desplazamiento, y el segundo subíndice, la posición y dirección de la fuerza
que causa el desplazamiento. Cada subíndice se refiere a una coordenada
que representa la ubicación y dirección de una fuerza o de un desplazamiento.
ANALISIS ESTRUCTURAL 16
17. Este enfoque se ilustra en la figura 2-9a. Si la relación entre la fuerza
aplicada y el desplazamiento resultante es lineal, se puede escribir:
1
1
1 F
f
D i
i = (2-12)
Donde fi1 es el desplazamiento en la coordenada i debido a una fuerza unitaria
en la ubicación y dirección de F1 (coordenada 1).
Di1
i
A i1
F
1
(a)
Di1
i
A i2
F
2
(b)
Di1
i
A i1
F
1
(c)
F
n
Figura 2-9. S
uperposición de desplazamientos y de fuerzas.
Si se aplica una segunda fuerza F2 que cause un desplazamiento Di2 en i
(figura 2-9b):
2
2
2 F
f
D i
i = (2-13)
en que fi2 es el desplazamiento en i debido a una fuerza unitaria en la
coordenada 2.
Si varias fuerzas F1, F2,…, Fn actúan simultáneamente (figura 2-9c), el
desplazamiento total en i es:
n
in
i
i
i F
f
F
f
F
f
D +
+
+
= L
2
2
1
1
(2-14)
ANALISIS ESTRUCTURAL 17
18. Es claro que el desplazamiento total no depende del orden de aplicación
de las cargas. Esto por supuesto no es válido cuado la relación esfuerzo-
deformación unitaria del material no es lineal.
Una estructura puede comportarse no linealmente aunque está hecha
de un material que satisface la ley de Hooke si se producen cambios en su
geometría inducidos por las cargas aplicadas. Considérese el puntal esbelto de
la figura 2-10a, sometido a una fuerza axial F1 que no es lo suficientemente
grande como para pandearlo. Por lo tanto, el puntal permanecerá recto y el
desplazamiento en cualquier punto A es DA = 0. Ahora bien, si el puntal se
somete a una carga lateral F2 actuando sola, habrá una deflexión lateral DA en
el punto A (figura 2-10b). Si actúan ambas fuerzas F1 y F2 (figura 2-10c), el puntal
quedará sometido a un momento flexionante adicional igual al producto de F1
multiplicado por la deflexión en la sección dada. Esta deflexión adicional causa
nuevas deflexiones y la deflexión D’A en A, en este caso será mayor que DA.
F
1
A DA= 0
(a)
A DA
(b)
F
2
A D'A
(c)
> DA
Figura 2-10. Estructura con deformación no lineal.
F
2
F
1
Es obvio que no existe tal momento flexionante cuando las cargas F1 y F2
actúan separadamente, de manera que el efecto combinado de F1 y F2 no es
igual a la suma de sus efectos separados, y no se satisface e principio de
superposición.
Cuando una estructura se comporta linealmente, se cumple el principio
de superposición para las fuerzas así como para los desplazamientos. Se
pueden determinar las resultantes de los esfuerzos internos en cualquier sección
o las componentes de reacción de la estructura de la figura 2-9c mediante la
suma de los efectos de las fuerzas F1, F2,…, Fn cuando cada una actúa por
separado.
ANALISIS ESTRUCTURAL 18
19. Supóngase que el símbolo Ai indica una acción general, la cual puede ser
una reacción, un momento flexionante, un esfuerzo cortante o compresión en
cualquier sección debido al efecto combinado de todas las fuerzas. Se puede
escribir entonces una ecuación general de superposición de fuerzas:
n
uin
ui
ui
i F
A
F
A
F
A
A +
+
+
= L
2
2
1
1 (2-15)
Donde Aui1 es la magnitud de la acción Ai cuando se aplica una fuerza unitaria
sola en la ordenada 1. De igual manera, Aui2,…, Auin, son los valores de la acción
A.
La ecuación 2-15 puede escribirse en forma matricial:
[ ] { } 1
1 ×
×
= n
n
ui
i F
A
A (2-16)
En las estructuras estáticamente indeterminadas, la superposición de
fuerzas sólo es válida si se cumple la ley de Hooke, porque las fuerzas internas
dependen de la deformación de los miembros.
2.6 Resumen.
La mayoría de las estructuras modernas son estáticamente
indeterminadas, y con el método de flexibilidad es necesario establecer para
una estructura dada el grado de indeterminación, que puede se externa,
interna o de ambas. En casos simples, el grado de indeterminación se puede
encontrar por simple inspección, aunque en estructuras más complejas o de
claros múltiples con varias crujías, resulta preferible establecer el grado de
indeterminación con la ayuda de expresiones que incluyan el número de
nudos, miembros y componentes de reacción. Se cuenta con este tipo de
expresiones para armaduras planas y tridimensionales (de nudos articulados) y
para marcos (con nudos rígidos).
Existen dos métodos generales para el análisis de estructuras. Uno es el
método de las fuerzas (o de flexibilidad), en el que se introducen liberaciones
para convertir la estructura en estáticamente determinada; se calculan los
desplazamientos resultantes y se corrigen las inconsistencias en los
desplazamientos con la aplicación de fuerzas adicionales en la dirección de las
liberaciones. De este modo se obtiene una serie de ecuaciones de
compatibilidad; al resolverlas, se determinan las fuerzas desconocidas.
En el otro método –de los desplazamientos (o de las rigideces)-, se
introducen restricciones en los nudos. Se calculan las fuerzas restrictivas que se
necesitan para impedir los desplazamientos de los nudos. Después se permite
que se presenten los desplazamientos en la dirección de las restricciones hasta
ANALISIS ESTRUCTURAL 19
20. que éstas hayan desaparecido; de aquí se obtiene un conjunto de ecuaciones
de equilibrio: su solución proporciona los desplazamientos desconocidos. Luego
se determinan las fuerzas internas de la estructura mediante superposición de
los efectos de estos desplazamientos y de los de la carga aplicada con los
desplazamientos restringidos.
El análisis de estructuras con el método de las fuerzas o el de los
desplazamientos implica el uso del principio de superposición, que permite una
simple suma de desplazamientos (o acciones) debidos a las cargas individuales
(o desplazamientos).
Tarea.
1. ¿Cuál es grado de indeterminación estática de las estructuras que se
muestran a continuación? Introduzca suficientes liberaciones para hacer cada
estructura estáticamente determinada.
(a) (b)
A B C
A B
C D
E F
A
B
C
(c)
A B C
D
E
A
A
B
B
C
C
D
D
E
E
F
F G H
I J
(d)
(e)
(f)
2. (a) Introduzca suficientes liberaciones para convertir el marco mostrado en
estáticamente determinado. Indique las liberaciones mediante un sistema de
coordenadas.
(b) Introduzca una articulación en la parte media de cada miembro y dibuje el
diagrama de momento flexionante para el marco debido a dos fuerzas
horizontales, cada una igual a P, aplicadas en E y en C. Muestre
esquemáticamente la magnitud y dirección de las componentes de reacción
en A.
ANALISIS ESTRUCTURAL 20
21. A B
C D
E F
P
P
L
L
L
CAPÍTULO 3. MÉTODO DE LAS FUERZAS PARA ANÁLISIS DE ESTRUCTURAS.
3.1 Descripción del método.
1. Primeramente, se determina el grado de indeterminación estática. Luego
se introduce un número de liberaciones igual al grado de
indeterminación, efectuándose cada liberación mediante la eliminación
de una fuerza externa o interna. Las liberaciones se deben seleccionar de
manera que la estructura restante sea estable y estáticamente
determinada. Sin embargo, en algunos casos el número de liberaciones
puede ser menor que el grado de indeterminación, siempre que la
estructura estáticamente indeterminada restante sea tan sencilla que se
pueda analizar fácilmente. En todos los casos, las fuerzas liberadas, que
también se denominan fuerzas redundantes, se deben escoger
cuidadosamente para que la estructura liberada se pueda analizar con
facilidad.
2. Las liberaciones introducen incongruencias en desplazamientos y como
segundo paso se determinan estas incongruencias o “errores” en la
estructura liberada. En otras palabras, se calcula la magnitud de los
“errores” en los desplazamientos que corresponden a las fuerzas
redundantes. Estos desplazamientos se pueden deber a cargas externas
aplicadas, asentamiento de los apoyos o variación de temperatura.
3. El tercer paso consiste en la determinación de los desplazamientos en la
estructura liberada debidos a valores unitarios de las redundantes
(véanse las figuras 3-1 d y e). Estos desplazamientos se necesitan en el
mismo lugar en la dirección que el error en desplazamientos determinado
en el paso dos.
4. A continuación se determinan los valores de las fuerzas redundantes
necesarias para eliminar los errores en los desplazamientos. Esto implica el
establecimiento de ecuaciones de superposición en las que los efectos
ANALISIS ESTRUCTURAL 21
22. de las fuerzas redundantes separadas se suman a los desplazamientos de
la estructura liberada.
5. En consecuencia, se encuentran las fuerzas que actúan sobre la
estructura indeterminada original: son la suma de las fuerzas de
corrección (redundantes) y las fuerzas aplicadas a la estructura liberada.
Ejemplo 3-1. En la figura 3-1a se muestra una viga ABC empotrada en C, que
descansa sobre apoyos de rodillos en A y en B y que soporta una carga
uniforme igual a q por unidad de longitud. La viga tiene una rigidez constante a
la flexión EI. Encuentre las reacciones de la viga.
(a)
A B
C
q por unidad de longitud
L L
(b)
A C
F
1, D1
F
2, D2
(c)
C
q por unidad de longitud
(f)
q por unidad de longitud
qL qL
D1
D2
(d)
f1
1
f21
1
(e)
f1
2
f22
1
qL/14
8qL/7
2
Figura 3-1. (a) Viga estáticamente indeterminada. (b) S
istema de coordenadas.
(c) Carga externa sobre la estructura liberada. (d) F1= 1. (e) F2= 1. (f) Redundantes.
La estructura es estáticamente indeterminada en segundo grado, por lo
que se deben eliminar dos fuerzas redundantes. Son posibles varias opciones,
por ejemplo, el momento y la reacción vertical en C, o las reacciones verticales
en A y B. para los fines de este ejemplo, se eliminarán la reacción vertical en B y
el momento en C. Por lo tanto, la estructura liberada es una viga simple AC con
las fuerzas redundantes y los desplazamientos que se muestran en la figura 3-1b.
La ubicación y dirección de las diversas fuerzas redundantes y de los
desplazamientos están referidos a un sistema de coordenadas.
ANALISIS ESTRUCTURAL 22
23. Las direcciones positivas de las fuerzas redundantes F1 y F2 se escogen
arbitrariamente pero las direcciones positivas de los desplazamientos en el
mismo lugar siempre tienen que concordar con los de las fuerzas redundantes.
Las flechas en la figura 3-1b indican las direcciones positivas seleccionadas en
el presente caso y, como las flechas representan tanto fuerzas como
desplazamientos, es conveniente en un caso general identificar las
coordenadas por medio de los números 1, 2,…, n.
Siguiendo este sistema, en la figura 3-1c se muestran los desplazamientos
en B y en C como D1 y D2, respectivamente. De hecho, como se ilustra en la
figura 3-1a, los desplazamientos reales en estos puntos tienen valor cero, de
modo que D1 y D2 representan las inconsistencias en deformación.
La magnitud de D1 y D2 se pueden calcular a partir del comportamiento
de la viga simplemente apoyada mostrada en la figura 3-1c. Para fines de este
ejemplo se pueden usar las siguientes expresiones. Por lo tanto:
EI
ql
D
24
5 4
1 −
= y
EI
ql
D
3
3
2 −
=
Los signos negativos indican que los desplazamientos son en direcciones
opuestas a las direcciones positivas escogidas en la figura 3-1b.
Cuando la liberación se aplica a una fuerza interna, deberá ser
representada en el sistema de coordenadas con un par de flechas en
direcciones opuestas.
Los desplazamientos debidos a valores unitarios de las redundantes se
muestran en las figuras 3-1 d y e. Estos desplazamientos adquieren los siguientes
valores:
EI
l
f
6
3
11 =
EI
l
f
4
2
12 =
EI
l
f
4
2
21 =
EI
l
f
3
2
22 =
El coeficiente general fij representa el desplazamiento en la coordenada i
debido a una redundante unitaria en la coordenada j.
Las relaciones geométricas expresan el hecho de que la traslación
vertical final en B y la rotación en C se anulan. Los desplazamientos finales son el
resultado de la superposición del efecto de la carga externa y de las fueras
redundantes sobre la estructura liberada. Por lo tanto, las relaciones
geométricas se pueden expresar como:
ANALISIS ESTRUCTURAL 23
24. 0
0
2
22
1
21
2
2
12
1
11
1
=
+
+
=
+
+
F
f
F
f
D
F
f
F
f
D
(3-1)
Una forma más general de la ecuación 3-1 es:
2
2
22
1
21
2
1
2
12
1
11
1
∆
=
+
+
∆
=
+
+
F
f
F
f
D
F
f
F
f
D
(3-2)
Donde ∆1 y ∆2 son los desplazamientos prescritos en las coordenadas 1 y 2 de la
estructura real. Si, en el ejemplo considerado, se necesita el análisis para los
efectos combinados de la carga q dada y de un asentamiento descendente δB
en el apoyo B (figura 3-1a), se deberá sustituir B
δ
−
=
∆1 , 0
1 =
∆ .
3.3 Matriz de flexibilidad.
Las relaciones de la ecuación 3-2 se pueden escribir en forma matricial
como:
[ ]{ } { }
D
F
f −
∆
= (3-3)
Donde:
{ }
⎭
⎬
⎫
⎩
⎨
⎧
=
2
1
D
D
D y
[ ] ⎥
⎦
⎤
⎢
⎣
⎡
=
22
21
12
11
f
f
f
f
f { }
⎭
⎬
⎫
⎩
⎨
⎧
=
2
1
F
F
F
Los elementos de la matriz [ ]
f son desplazamientos debidos a los valores
unitarios de las redundantes. Por lo tanto, [ ]
f depende de las propiedades de la
estructura y representa la flexibilidad de la estructura liberada. Por esta, a [ ]
f se
le denomina matriz de flexibilidad, y sus elementos se conocen como
coeficientes de flexibilidad.
Los elementos del vector { }
F son las redundantes que se pueden obtener
resolviendo la ecuación 3-3; por la tanto:
{ } [ ] { }
D
f
F −
∆
=
−1
(3-4)
En el ejemplo estudiado, la matriz de flexibilidad y su inversa son:
[ ]
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
EI
l
EI
l
EI
l
EI
l
f
3
2
4
4
6
2
2
3
(3-5)
y
ANALISIS ESTRUCTURAL 24
25. [ ] ⎥
⎦
⎤
⎢
⎣
⎡
−
−
=
−
2
3
1
2
3
3
8
7
12
l
l
l
l
EI
f (3-6)
El vector de desplazamiento es:
{ }
⎭
⎬
⎫
⎩
⎨
⎧
=
−
∆
8
5
24
3
l
EI
ql
D
Sustituyendo en la ecuación 3-4, o resolviendo la ecuación 3-3 se obtiene:
{ }
⎭
⎬
⎫
⎩
⎨
⎧
=
l
ql
F
16
14
Por lo tanto, las redundantes son:
ql
F
7
8
1 = y
14
2
2
ql
F =
El signo positivo indica que las redundantes actúan en las direcciones
positivas seleccionadas en la figura 3-1b.
Las fuerzas finales que actúan en las estructura se ilustra en la figura 3-1f.
Es importante observar que la matriz de flexibilidad es dependiente de la
selección de las fuerzas redundantes: con diferentes redundantes para la misma
estructura se obtendría una matriz de flexibilidad diferente.
Las reacciones y las fuerzas internas también se pueden determinar por la
superposición del efecto de las cargas externas en la estructura liberada y el
efecto de las fuerzas redundantes. Esto se puede expresar con la siguiente
ecuación de superposición:
( )
n
uin
ui
ui
si
i F
A
F
A
F
A
A
A +
+
+
+
= L
2
2
1
1 (3-7)
Donde:
Ai = cualquier reacción i, que es una reacción en uno de los apoyos,
fuerza cortante, fuerza axial, momento de torsión o momento flexionante
en una sección de estructura real.
Asi = la misma acción que Ai, pero en la estructura liberada sometida a las
cargas externas.
Aui1, Aui2,…,Auin = la acción correspondiente debida a una fuerza unitaria
que actúa sola sobre la estructura liberada en la coordenada 1, 2,…, n,
respectivamente.
ANALISIS ESTRUCTURAL 25
26. F1, F2,…, Fn =fuerzas redundantes que actúan sobre la estructura liberada-
El término entre paréntesis de la ecuación 3-7 representa la acción de
todas las fuerzas redundantes aplicadas simultáneamente a la estructura
liberada.
En general, se necesitan varias reacciones y fuerzas internas. Estas se
pueden obtener con ecuaciones similares a la ecuación 3-7. Si el número de
acciones es m, el sistema de ecuaciones que se necesita se puede expresar en
forma matricial:
{ } { } [ ] { } 1
1
1 ×
×
×
× +
= n
n
m
u
m
s
m F
A
A
A (3-8)
El orden de cada matriz se indica en la ecuación 3-8, pero, en esta
ocasión, puede ser conveniente escribir las matrices completas. Por lo tanto,
{ }
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
m
A
A
A
A
L
2
1
{ }
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
sm
s
s
s
A
A
A
A
L
2
1
[ ]
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
umn
um
um
n
u
u
u
n
u
u
u
u
A
A
A
A
A
A
A
A
A
A
L
L
L
L
L
L
L
2
1
2
22
21
1
12
11
3.4 Análisis para cargas diferentes.
Cuando se usa la ecuación 3-3 para encontrar las fuerzas redundantes en
una estructura dada bajo varias condiciones de carga diferentes, no es
necesario repetir el cálculo de la matriz de flexibilidad (y su inversa). Cuando el
número de cargas es p, la solución se puede combinar en una ecuación
matricial:
[ ] [ ] [ ] p
n
n
n
p
n D
f
F ×
−
×
× −
∆
=
1
(3-9)
En que cada columna de [ y
]
F [ ]
D corresponde a una condición de carga.
Las reacciones o las resultantes de los esfuerzos en la estructura original se
pueden determinar con ecuaciones similares a la ecuación 3-8, es decir,
[ ] [ ] [ ] [ ] p
n
n
m
u
p
m
s
p
m F
A
A
A ×
×
×
× +
= (3-10)
ANALISIS ESTRUCTURAL 26
27. 3.5 Las cinco etapas del método de las fuerzas.
En el análisis con el método de las fuerzas intervienen cinco etapas que se
resumen a continuación:
Etapa 1. Introduzca liberaciones y defina un sistema de coordenadas. Además,
defina , que son las acciones requeridas, y defina la convención de signos
(en caso necesario).
[ ] p
m
A ×
Etapa 2. Como resultado de las cargas aplicadas a la estructura liberada,
determine y [ ] . Introduzca también los desplazamientos
preestablecidos .
[ ] p
n
D × p
m
s
A ×
[ ] p
n×
∆
Etapa 3. Aplique valores unitarios de las redundantes de uno en uno en la
estructura liberada y genere los valores de [ ] n
n
f × y de [ ] n
m
u
A ×
.
Etapa 4. Resuelva las ecuaciones geométricas:
[ ] [ ] [ ] p
n
p
n
n
n D
F
f ×
×
× −
∆
= (3-11)
Con esto se obtienen las redundantes [ ] p
n
F × .
Etapa 5. Calcule las acciones necesarias por superposición:
[ ] [ ] [ ] [ ] p
n
n
m
u
p
m
s
p
m F
A
A
A ×
×
×
× +
= (3-12)
Al terminar la etapa 3, ya se habrán generado todas las matrices
necesarias para el análisis. En las dos últimas etapas sólo interviene álgebra
matricial. Se podrá eliminar la etapa 5 cuando no se requiera otra acción
aparte de las cargas redundantes, o cuando la superposición se pueda hacer
mediante inspección una vez determinadas las redundantes. Cuando éste sea
el caso, las matrices [ , y
]
A [ s
A ] [ ]
u
A no harán falta.
Para una referencia rápida, los símbolos usados se definen como sigue:
n, p, m = Número de redundantes, número de condiciones de carga, y número
de acciones requeridas.
[ ]=
A Acciones requeridas.
[ ]=
s
A Valores de las acciones debidas a las cargas aplicadas a la estructura
liberada.
ANALISIS ESTRUCTURAL 27
28. [ ]=
u
A Valores de las acciones en la estructura liberada debidos a fuerzas
unitarias aplicadas separadamente en cada coordenada.
[ ]=
D Desplazamientos de la estructura liberada en las coordenadas debidos a
las cargas; estos desplazamientos representan incompatibilidades que deberán
ser eliminadas por las redundantes.
[ ]=
∆ Desplazamientos preestablecidos en las coordenadas en la estructura real;
éstos representan desplazamientos impuestos que se deben mantener.
[ ]=
f Matriz de flexibilidad.
Ejemplo 3-2. Encuentre los momentos flexionantes MB y MC y la reacción RA para
la viga que se muestra en la figura 3-1 debidos al efecto separado de: (1) un
asentamiento descendente ( )
A
δ del apoyo A; (2) un asentamiento
descendente ( B )
δ del apoyo B; (3) una aumento de temperatura que varía
linealmente con la profundidad h, desde Tt hasta Tb en las fibras superior e
inferior, respectivamente.
(a)
A B
C
q por unidad de longitud
L L
(b)
A C
F
1, D1
F
2, D2
(c)
C
q por unidad de longitud
(f)
q por unidad de longitud
qL qL
D1
D2
(d)
f1
1
f21
1
(e)
f1
2
f22
1
qL/14
8qL/7
2
Figura 3-1. (a) Viga estáticamente indeterminada. (b) S
istema de coordenadas.
(c) Carga externa sobre la estructura liberada. (d) F1= 1. (e) F2= 1. (f) Redundantes.
ANALISIS ESTRUCTURAL 28
29. Etapa 1. Se seleccionan las liberaciones y el sistema de coordenadas (figura 3-
1b). Las acciones necesarias son las siguientes:
[ ]
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎭
⎬
⎫
⎩
⎨
⎧
⎭
⎬
⎫
⎩
⎨
⎧
⎭
⎬
⎫
⎩
⎨
⎧
=
3
2
1 A
B
A
B
A
B
R
M
R
M
R
M
A
El momento flexionante se considera positivo cuando produce esfuerzos
de tensión en la fibra inferior. Una acción RA hacia arriba es positiva. Las
acciones requeridas MC no necesariamente deben incluirse en [ , debido a
que y los valores de las redundantes
]
A
2
F
MC = { }
F se calcularán en la etapa 4.
Los subíndices 1, 2 y 3 de la ecuación anterior se refieren a las tres condiciones
de carga.
Etapa 2. La estructura liberada se muestra en la figura 3-4 a y b para los casos
(1) y (3) respectivamente. Los vectores de desplazamiento { }
∆ y en los tres
casos son:
{ }
D
[ ] ⎥
⎦
⎤
⎢
⎣
⎡ −
=
∆
0
0
0
0
0 B
δ
[ ] ( )
( )
⎥
⎦
⎤
⎢
⎣
⎡
−
−
−
−
=
8
/
2
0
)
2
/(
8
/
2
0
2
/
2
l
l
l
D
A
A
ψ
δ
ψ
δ
En este caso, ψ es la curva térmica en la estructura liberada (pendiente
del diagrama de deformaciones unitarias (figura 3-4c):
( )lh
T
T t
b −
= α
ψ (3-13)
Donde α es el coeficiente de expansión térmica (grados -1).
Observe que en el caso (1), { } { }
0
=
∆ debido a que la estructura real tiene
desplazamientos nulos en las coordenadas 1 y 2; sin embargo, la estructura
liberada tiene desplazamientos que se van a eliminar en las coordenadas
{ } { }
l
D A
A 2
/
,
2
/ δ
δ −
−
= .
Los valores de las acciones en la estructura liberada son cero para los tres
casos:
[ ] [ ] 3
2
0 ×
=
s
A
Etapa 3. Las fuerzas unitarias aplicadas en las coordenadas se representan en
las figuras 3-1 d y e. La matriz de flexibilidad [ ]
f y su inversa, determinadas en el
ejemplo 3-1 (ecuaciones 3-5 y 3-6), siguen siendo válidas. Los valores de las
acciones debidas a F1 = 0 o a F2 = 1 son los siguientes:
ANALISIS ESTRUCTURAL 29
30. [ ]
( )⎥
⎦
⎤
⎢
⎣
⎡
−
−
−
−
=
l
l
Au
2
/
1
5
.
0
5
.
0
5
.
0
Etapa 4. Sustituyendo en la ecuación 3-11 de geometría se obtiene:
[ ]
( ) ⎥
⎦
⎤
⎢
⎣
⎡ −
=
⎥
⎦
⎤
⎢
⎣
⎡
l
l
l
F
l
l
l
l
EI A
B
A
ψ
δ
ψ
δ
δ
0
2
/
2
/
2
/
3
/
2
4
/
4
/
6
/
1 2
2
2
3
La solución es:
[ ] ⎥
⎦
⎤
⎢
⎣
⎡
−
−
= 3
2
3
5
.
0
3
5
.
0
8
5
.
2
7
12
l
l
l
l
l
EI
F
B
A
B
A
ψ
δ
δ
ψ
δ
δ
Etapa 5. Sustituyendo en la ecuación 3-12 de superposición se obtiene:
[ ] ⎥
⎦
⎤
⎢
⎣
⎡
−
−
−
−
=
l
l
l
l
l
EI
A
B
A
B
A
/
75
.
0
/
5
.
2
/
75
.
0
/
5
.
2
/
7
12
3
3
2
2
ψ
δ
δ
ψ
δ
δ
Los elementos de son los valores requeridos de M
[ ]
A B y de RA en los tres
casos; la inversión del signo de F2 proporciona los valores correspondientes de
MC:
[ ] [ ]
3
3
5
.
0
3
5
.
0
7
12
l
l
l
l
EI
M B
A
C ψ
δ
δ −
−
=
Se debe observar que RA, MB y MC son proporcionales al valor del
producto EI. En general, las reacciones y las fuerzas internas debidas a los
asentamientos de los apoyos o a variaciones de temperatura en estructuras
estáticamente indeterminadas son proporcionales al valor de EI empleado en el
análisis lineal.
Falta figura 3-4, que debe ser la 3-2 para la etapa 2 del ejemplo
anterior.
ANALISIS ESTRUCTURAL 30
31. Ejemplo que se planteo en clase.
A
B
L L/2 L/2
q
qL
F1
F2
∑ = 0
A
M
( ) 0
2
2
3
2 =
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
−
L
qL
L
qL
L
RB ( ) 0
2
2 2
=
− qL
L
RB qL
RB =
∑ = 0
y
F 0
=
−
−
+ qL
qL
R
R B
A qL
R
qL
R B
A =
−
= 2
q
qL
qL qL
q
qL
q
qL qL
=
∴ ( ) L
x
qL
L
x
q
qx
qLx
M x
2
3
2
2
2
2
−
−
−
+
−
= Con funciones de singularidad.
Diagrama de cuerpo libre.
q
qL
q
qL
L L/2
X
(X-3L/2)
M(x)
Aplicando doble integración:
L
x
qL
L
x
q
qx
qLx
dx
d
EI
2
3
2
2
2
2
2
2
−
−
−
+
−
=
ANALISIS ESTRUCTURAL 31
32. 1
2
3
3
2
2
3
2
6
6
2
C
L
x
qL
L
x
q
qx
qLx
dx
dy
EI +
−
−
−
+
−
=
2
1
3
4
4
3
2
3
6
24
24
6
C
x
C
L
x
qL
L
x
q
qx
qLx
EIy +
+
−
−
−
+
−
=
Si 0
=
x 0
=
y ∴ 0
2 =
C
Si L
x 2
= 0
=
y
1
4
4
4
4
2
48
24
3
2
3
4
0 LC
qL
qL
qL
qL +
−
+
−
= 1
4
2
16
11
0 LC
qL +
= 3
1
32
11
qL
C −
=
Conociendo ; para
1
C L
x =
4
4
4
4
32
7
32
11
24
6
qL
qL
qL
qL
EIy −
=
−
−
= ↓
−
=
EI
qL
y
4
32
7
Aplicando Apéndice “B”.
L
l 2
=
P
x
b
l
2
5
.
0
l
l
x =
=
l
b
4
3
=
Como b
x <
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
⎟
⎠
⎞
⎜
⎝
⎛
⎟
⎠
⎞
⎜
⎝
⎛
−
=
2
2
1
2
4
3
4
3
2
6
2
4
3
l
l
l
l
lEI
l
l
l
P
f
EI
Pl
l
l
l
EI
Pl
f
3
2
2
2
1
768
11
4
16
9
2
3
48
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
Si qL
P = L
l 2
= ↓
=
EI
qL
f
4
1
96
11
ANALISIS ESTRUCTURAL 32
33. ( )
EI
qL
L
EI
qL
EI
l
P
l
EI
P
l
l
lEI
l
P
f
3
2
2
2
2
2
3
32
7
2
128
7
128
7
16
7
8
4
3
6
4
3
−
=
−
=
−
=
⎟
⎠
⎞
⎜
⎝
⎛
−
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
−
=
q
l
Bl ψl
F
1 F3
L
l 2
=
5
.
0
=
B
5
.
0
=
ψ
( ) ( ) ( )
[ ]
2
2
2
4
1 5
.
0
2
5
.
0
2
5
.
0
5
.
0
24
−
−
=
EI
ql
f
( )
EI
qL
EI
L
q
EI
ql
f
4
4
4
1
48
5
2
768
5
768
5
=
=
=
EI
qL
EI
qL
f TOTAL
4
4
1
32
7
48
5
96
11
=
⎟
⎠
⎞
⎜
⎝
⎛
+
=
Ahora para B
θ (extremo)
L
x 2
=
3
3
3
3
3
32
11
8
6
3
4
2 qL
qL
qL
qL
qL
dx
dy
EI −
−
+
−
=
EI
qL
B
3
96
35
=
θ
( ) ( ) EI
ql
EI
ql
f
3
2
2
3
3
384
7
5
.
0
2
5
.
0
24
−
=
−
−
=
EI
qL
f
3
3
48
7
−
=
Finalmente el signo (-) sólo indica de acuerdo al apéndice que el giro es .
Con doble integración ( )
−
↓
δ y θ ( ).
+
EI
qL
EI
qL
EI
qL
f TOTAL
3
3
3
3
96
35
48
7
32
7
=
+
=
Para la viga:
q qL
(7/32)(qL/EI)
4
(35/96)(qL/EI)
3
ANALISIS ESTRUCTURAL 33
34. Desplazamientos incongruentes y se deberán corregir ya que deben valer
cero.
Usando flexibilidades:
{ } [ ] { }
D
f
F −
∆
=
−1
0
=
∆ Tomado de acuerdo a apuntes.
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
−
−
=
EI
qL
EI
qL
D 3
4
96
35
32
7
[ ] ⎥
⎦
⎤
⎢
⎣
⎡
−
−
=
−
2
3
1
2
3
3
8
7
12
L
L
L
L
EI
f
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
⎥
⎦
⎤
⎢
⎣
⎡
−
−
2
1
3
4
3
3
96
35
32
7
2
3
3
8
7
12
F
F
EI
qL
EI
qL
L
L
L
L
EI
⎥
⎦
⎤
⎢
⎣
⎡
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
+
−
−
2
1
5
5
4
4
3
96
70
32
21
96
105
32
56
7
12
F
F
EI
qL
EI
qL
EI
qL
EI
qL
L
EI
qL
F
8
9
1 =
8
2
2
qL
F = ∴
q qL qL/8
2
9qL/8
Las reacciones se resuelven por estática.
ANALISIS ESTRUCTURAL 34
35. CAPÍTULO 4. MÉTODOS ENERGÉTICOS.
4.1 Introducción.
El sistema experimenta una deformación cuando cambia su
configuración o cuando se desplazan sus puntos materiales.
Un sistema de fuerzas aplicado a un cuerpo, lo deforma hasta que el
sistema de fuerzas internas equilibra al sistema de fuerzas externo.
Las fuerzas externas realizan un trabajo que se deforma y acumula en el
cuerpo.
Este trabajo o energía de deformación es el utilizado por el cuerpo para
recuperar su forma original al cesar la acción.
4.2 Ley de termodinámica.
El trabajo efectuado por las fuerzas externas más el calor que absorbe el
sistema del exterior es igual al incremento de energía cinética más el
incremento de energía interna.
En un sistema elástico se desprecian las pérdidas por calor y la energía
interna del sistema es la energía o trabajo de deformación de dicho sistema.
Dada una barra elástica de sección transversal A y longitud L sujeta a una
carga axial P (aplicada gradualmente) cumple con la ley experimental de
elasticidad lineal de Hooke.
P
EA
L
=
δ (4-1)
Donde δ es la deformación de la barra y E el módulo de elasticidad de
Young.
El trabajo desarrollado en contra de las fuerzas internas del sistema es:
∫
= δ
Pd
W (4-2)
De la ecuación 4-1 se despeja P:
δ
L
EA
P =
ANALISIS ESTRUCTURAL 35
36. Sustituyendo en la ecuación 4-2 se obtiene:
δ
δ
δ
δ P
L
EA
d
L
EA
W
2
1
2
2
=
=
= ∫ , ley de Clapeyron (4-3)
p
δ
C
W
δ
P
W
2
1
=
∫
= dP
C δ
Energía complementaria de deformación:
∫ ∫ =
=
=
= P
P
EA
L
PdP
EA
L
dP
C δ
δ
2
1
2
2
(4-4)
Cuando la aplicación de la carga es instantánea, el trabajo de
deformación es:
W
C
P +
=
δ
4.3 Energía específica de deformación.
El esfuerzo normal de la barra sometida a carga axial es:
A
P
=
σ (4-5)
Y la deformación unitaria es:
L
δ
ε = (4-6)
Despejando P y δ respectivamente de las ecuaciones 4-5 y 4-6 en la
ecuación 4.3 se tiene:
A
P σ
= y L
ε
δ =
AL
L
A
P
W σε
ε
σ
δ
2
1
2
1
2
1
=
=
= (4-7)
ANALISIS ESTRUCTURAL 36
37. Si AL es un volumen unitario se tiene el trabajo específico de deformación
, es decir la energía de deformación almacenada en la unidad de volumen:
u
W
σε
2
1
=
u
W (4-8)
Sea una unidad de volumen y un corte paralelo al plano xy:
y
x
∆
x
∆
z
∆
y
∆
y
∆
x
δ δ
γ
P
P
P
P
El esfuerzo cortante y el giro son respectivamente:
z
x
P
∆
∆
=
τ y
y
∆
=
δ
γ (4-9)
Despejando P y δ de las ecuaciones anteriores y remplazándolos en la
ecuación 4-3 se tiene:
z
x
P ∆
∆
= τ y y
∆
= γ
δ
y
z
x
y
z
x
P
W ∆
∆
∆
=
∆
∆
∆
=
= τγ
γ
τ
δ
2
1
2
1
2
1
Es decir:
τγ
2
1
=
u
W (4-10)
Dado que ∆x∆y∆z=1.
Basándose en el principio de superposición de causas y efectos, aplicable
a materiales linealmente elásticos, el trabajo específico de deformación por
ANALISIS ESTRUCTURAL 37
38. aplicación gradual de la carga es para el caso general de esfuerzos normales y
tangenciales.
σ
x
τx
y
τx
z
σ
z
τz
y
τz
x
y
x
τy
x
σ
y
τy
z
( )
yz
W yz
xz
xz
xy
xy
z
z
y
y
x
x
u γ
τ
γ
τ
γ
τ
ε
σ
ε
σ
ε
σ +
+
+
+
+
=
2
1
(4-11)
Por la condición de equilibrio se tiene:
yx
xy τ
τ = , zx
xz τ
τ = , zy
yz τ
τ =
La energía de deformación total se obtiene integrando en todo el
volumen del cuerpo:
∫∫∫
=
v
u dV
W
W (4-12)
4.4 Energía de deformación de barras.
Sea una barra prismática en el espacio tridimensional, que cumple la ley
de Hooke y que se encuentra sujeta a los elementos mecánicos: fuerza axial,
fuerza cortante, momento flexionante y momento torsionante, donde se
cumple el estado de esfuerzos de Saint Venant:
0
=
=
= yz
y
z τ
σ
σ
ANALISIS ESTRUCTURAL 38
x
y
z
39. Aplicando el principio de superposición de causas y efectos, se considera
por separado cada uno de los elementos mecánicos.
4.5 Efecto de fuerza normal.
Si actúa la fuerza normal Nx se produce el esfuerzo normal siguiente:
A
Nx
x =
σ (4-13)
Donde la deformación axial es:
L
δ
ε = (4-6)
Remplazando la deformación determinada por la Ley de Hooke en la
ecuación anterior se tiene:
x
N
EA
L
=
δ
E
AE
N
L
x
x
x
σ
δ
ε =
=
= (4-14)
El trabajo específico producto de la fuerza normal queda como:
2
2
2
2
2
1
2
1
EA
N
E
W x
x
x
x
u =
=
= σ
ε
σ (4-15)
La energía de deformación producto de la fuerza normal se obtiene
integrando sobre el volumen:
∫∫ ∫∫∫ ∫ ∫∫ ∫ ∫∫
∫ =
=
=
=
v v
L
A
L
A
x
x
x
u dA
EA
N
dx
dA
EA
N
dx
dV
EA
N
dV
W
W
0 0 2
2
2
2
2
2
2
2
2
(4-16)
Dado que Nx, E y A son constantes en una sección transversal y ,
se tiene finalmente que el trabajo de deformación por fuerza normal es:
∫∫ =
A
A
dA
∫
=
L
x
N dx
EA
N
W
0
2
2
(4-17)
ANALISIS ESTRUCTURAL 39
40. 4.6 Efecto de momento flexionante.
De acuerdo con la teoría de elasticidad y de resistencia de materiales, si
actúa un momento flexionante Mz, se produce el esfuerzo siguiente:
y
I
M
z
z
x =
σ (4-18)
Donde es la distancia del eje neutro al punto donde se calcula el esfuerzo e
y
I el momento de inercia de la sección transversal respecto al eje z.
Remplazando el valor de σx en la ecuación 4-8 se tiene:
2
2
2
2
2
1
2
1
2
1
y
I
M
E
E
W
z
z
x
x
x
u =
=
= σ
ε
σ (4-19)
La energía de deformación producto del momento flexionante se obtiene
integrando el trabajo específico sobre todo el volumen:
∫∫∫ ∫∫∫ ∫ ∫∫ ∫
=
=
=
=
v v
L
A
L
z
z
z
z
u dx
dA
y
EI
M
dx
dV
y
EI
M
dV
W
W
0 0
2
2
2
2
2
2
2
2 ∫∫
A
z
z
dA
y
EI
M 2
2
2
2
(4-20)
Dado que ,
z
M E e son constantes en una sección dada y , se
tiene finalmente que la energía de deformación por momento flexionante es:
z
I ∫∫ =
A
I
dA
y2
∫
=
L
z
z
M dx
EI
M
W z 0
2
2
(4-21)
4.5 Efecto de fuerza cortante.
Si se considera la acción de la fuerza cortante sobre una barra, se
producen respectivamente el esfuerzo y la deformación
y
V
xz
γ siguientes:
y
z
z
y
xz
b
I
Q
V
=
τ (4-22)
xz
xz Gγ
τ = ⇒
G
xz
xz
τ
γ = (4-23)
Donde es el momento estático respecto a
z
Q z , el ancho de la sección en
estudio y G el módulo de elasticidad transversal, que varía entre y .
y
b
E
4
.
0 E
5
.
0
ANALISIS ESTRUCTURAL 40
41. Remplazando los valores de la deformación xz
γ y del esfuerzo xz
τ en la
ecuación 4-8 se obtiene el trabajo específico siguiente:
2
2
2
2
2
2
1
2
1
2
1
y
z
z
y
xz
xz
xz
u
b
I
Q
V
G
G
W =
=
= τ
γ
τ (4-24)
La energía de deformación producto de la fuerza cortante se obtiene
integrando el trabajo específico sobre todo el volumen:
∫ ∫∫∫ ∫ ∫
∫∫ =
=
=
v
L
A y
z
z
y
y
z
z
y
v
u
V dA
b
I
Q
V
G
dx
dV
b
I
Q
V
G
dV
W
W y 0 2
2
2
2
2
2
2
2
2
1
2
1
(4-25)
Por otro lado, se puede obtener el momento de inercia de la sección a
través del radio de giro, de la manera siguiente:
A
Iz
=
ρ ⇒ 2
ρ
A
Iz =
Remplazando este valor de en la ecuación anterior se tiene:
z
I
∫ ∫∫ ∫ ∫∫
=
=
L
A
L
y
z
z
A
y
y
z
z
y
V dA
b
I
Q
GA
V
dx
dA
b
I
Q
V
G
dx
W y 0 0 2
2
2
2
2
2
2
2
2
2
1
ρ
(4-26)
Donde , y
y
V G A son constantes en una sección dada y ∫∫
=
A y
z
z
dA
b
I
Q
k 2
2
2
ρ
sólo
depende de la forma de la sección y se denomina coeficiente de forma “k”.
Por lo tanto, en elementos de sección constante el trabajo de
deformación por fuerza cortante se expresa como:
dx
GA
V
k
W
L y
Vy ∫
=
0
2
2
(4-27)
El coeficiente de forma k vale 1.2 para secciones rectangulares y
triangulares, 10/9 para secciones circulares y para perfiles
laminados.
alma
ción A
A /
sec
ANALISIS ESTRUCTURAL 41
42. 4.6 Efecto de momento torsionante.
Se puede demostrar que una barra de sección circular o anular sujeta a
momento torsionante se producen los esfuerzos tangenciales siguientes:
x
M
r
J
M x
xz=
τ (4-28)
Donde es el momento polar de inercia y
J r la distancia al centro de la
sección al punto en estudio.
De acuerdo a la ecuación 4-24, el trabajo específico es:
2
2
2
2
2
1
2
1
2
1
r
J
M
G
G
W x
xz
xz
xz
u =
=
= τ
γ
τ (4-29)
La energía de deformación producto del momento torsionante se obtiene
integrando el trabajo específico sobre todo el volumen:
∫∫ ∫ ∫ ∫∫
∫∫
∫ =
=
=
v
L
A
x
v
x
u
V dA
GJ
M
dx
dV
r
J
M
G
dV
W
W y 0 2
2
2
2
2
2
2
1
(4-30)
Donde , y son constantes para una sección dada y es el
momento polar de inercia.
x
M G J ∫∫ =
A
J
dA
r2
Por lo tanto, en elementos de sección constante el trabajo de
deformación por momento de torsión se expresa como:
dx
GJ
M
W
L
o
x
Mx ∫
=
2
2
(4-31)
Para secciones circulares o anulares tiene el valor de:
J
( )
4
4
32
i
e D
D
J −
=
π
(4-32)
Para secciones no circulares o anulares se utiliza el momento polar de inercia
modificado .
m
J
ANALISIS ESTRUCTURAL 42
43. ∫
=
L
m
x
M ds
GJ
M
W x 0
2
2
(4-33)
Para secciones rectangulares tiene el valor de:
m
J
3
3
1
bt
Jm = (4-34)
Donde es lado mayor y t el de dimensión menor.
b
Finalmente, para el caso general de una barra tridimensional, sujeta a los
6 esfuerzos o elementos mecánicos, se tiene el trabajo de deformación
siguiente:
∫ ∫ ∫ ∫ ∫ ∫
+
+
+
+
+
=
L
o
L L L L L
m
x
y
y
z
z
z
y
x
dx
GJ
M
dx
EI
M
dx
EI
M
dx
GA
V
k
dx
GA
V
k
dx
EA
N
W
0 0 0 0 0
2
2
2
2
2
1
2
2
2
2
2
2
2
2
(4-35)
ANALISIS ESTRUCTURAL 43
44. CAPÍTULO 5. OBTENCIÓN DE LA MATRIZ DE FLEXIBILIDADES Y DE RIGIDECES.
Sea:
F
2
F
1
F
3
A B
∑ = 0
Fx
F
2
F
1
F
3 M(x)
N(x)
V(x)
x
0
)
(
1 =
− x
N
F ∴ 1
)
( F
x
N =
∑ = 0
Fy
0
)
(
2 =
− x
V
F ∴ 2
)
( F
x
V =
∑ = 0
2
M
0
)
( 2
3 =
−
+
− x
F
F
x
M ∴ x
F
F
x
M 2
3
)
( −
= (5-1) las tres anteriores.
La energía de deformación para este elemento se puede expresar como:
∫ ∫ ∫
+
+
=
L L L
z
z
y
x
dx
EI
M
dx
GA
V
k
dx
EA
N
W
0 0 0
2
2
1
2
2
2
2
(5-2)
Sustituyendo los valores de , y , se tiene:
x
N y
V z
M
( )
∫
∫
∫
−
+
+
=
L
z
L
L
dx
EI
x
F
F
dx
GA
F
k
dx
EA
F
W
0
2
2
3
0
2
2
1
0
2
1
2
2
2
∫ ∫ ∫
+
−
+
+
=
L L L
z
dx
EI
x
F
x
F
F
F
dx
GA
F
k
dx
EA
F
0 0 0
2
2
2
3
2
2
3
2
2
1
2
1
2
2
2
2
L
z
z
z
L
L
EI
x
F
EI
x
F
F
EI
x
F
x
GA
F
k
x
EA
F
0
3
2
2
2
3
2
2
3
0
2
2
1
0
2
1
6
2
2
2
2
⎥
⎦
⎤
+
−
+
⎥
⎦
⎤
+
⎥
⎦
⎤
=
ANALISIS ESTRUCTURAL 44
45. z
z
z EI
L
F
EI
L
F
F
EI
L
F
GA
L
F
k
EA
L
F
W
6
2
2
2
2
3
2
2
2
3
2
2
3
2
2
1
2
1
+
−
+
+
= (5-3)
De acuerdo a los teoremas de Castigliano:
i
i
F
W
δ
=
∂
∂
(5-4)
1
1
1
1 2
2
F
EA
L
EA
L
F
F
W
=
=
=
∂
∂
δ (5-5)
3
2
2
3
1
2
3
3
2
2
1
2
2 2
3
2
6
2
2
2
F
EI
L
F
EI
L
GA
L
k
EI
L
F
EI
L
F
GA
L
F
k
F
W
z
z
z
z
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
−
+
=
=
∂
∂
δ (5-6)
3
2
2
2
2
3
2
2
3
3
3 2
2
2
2
2
F
EI
L
F
EI
L
F
EI
L
F
EI
L
F
EI
L
EI
L
F
F
W
z
z
z
z
+
−
=
−
=
−
=
=
∂
∂
δ (5-7)
Expresando las ecuaciones anteriores en forma matricial, se tiene:
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
3
2
1
2
2
3
3
2
1
2
0
2
3
0
0
0
F
F
F
EI
L
EI
L
EI
L
EI
L
GA
kL
EA
L
z
z
z
δ
δ
δ
(5-8)
Esta ecuación se puede escribir en forma abreviada, de la manera:
{ } [ ] { }A
AA
A F
f
=
δ (5-9)
Donde es una matriz de flexibilidades, que relaciona las fuerzas en el
extremo
[ ]AA
f
A , , con los desplazamientos del mismo extremo
{ }A
F A , { }A
δ , de un
elemento que une los puntos A y B .
Despejando de la ecuación 5-5, se tiene:
1
F
ANALISIS ESTRUCTURAL 45
46. 1
1 F
EA
L
=
δ ∴ 1
1 δ
L
EA
F = (5-10)
Donde es una fuerza axial en el extremo
1
F A y 1
δ el desplazamiento
longitudinal (axial del mismo extremo A del elemento B
A − ).
Resolviendo el sistema de ecuaciones 5-6 y 5-7 para las fuerzas y y
despreciando el término de cortante
2
F 3
F
GA
L
k1
, se tiene:
3
2
2
3
1
2
2
3
F
EI
L
F
EI
L
GA
L
k
z
z
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
δ (5-6)
3
2
2
3
2
F
EI
L
F
EI
L
z
z
+
−
=
δ (5-7)
Multiplicando la ecuación 5-7 por :
2
/
L
3
2
2
3
3
2
4
2
F
EI
L
F
EI
L
L
z
z
+
−
=
δ (5-11)
Sumando la ecuación 5-11 a la ecuación 5-6:
z
z
z
z EI
L
F
EI
L
F
EI
L
EI
L
L
12
12
3
4
4
3
2
3
2
3
2
3
3
3
2 =
⎟
⎠
⎞
⎜
⎝
⎛ −
=
⎥
⎦
⎤
⎢
⎣
⎡
−
=
+ δ
δ
∴ 3
2
2
3
2
6
12
δ
δ
L
EI
L
EI
F z
z
+
= (5-12)
Sustituyendo el valor de en la ecuación 5-6 se tiene:
2
F
3
2
3
2
3
3
2
2
6
12
3
F
EI
L
L
EI
L
EI
EI
L
z
z
z
z
z
−
⎥
⎦
⎤
⎢
⎣
⎡
+
= δ
δ
δ
3
2
3
2
2
2
2
4 F
EI
L
L
z
−
+
= δ
δ
δ
ANALISIS ESTRUCTURAL 46
47. 3
2
3
2
2
2
3 F
EI
L
L
z
−
=
−
− δ
δ
∴ 3
2
2
3
4
6
δ
δ
L
EI
L
EI
F z
+
= (5-13)
Expresando las ecuaciones 5-10, 5-12 y 5-13 en forma matricial:
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
3
2
1
2
2
3
3
2
1
4
6
0
6
12
0
0
0
δ
δ
δ
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
(5-14)
Esta ecuación se puede abreviar de la forma siguiente:
{ } [ ] { }A
AA
A k
F δ
=
Donde es una matriz de rigideces que relaciona los desplazamientos en el
extremo
[ ]AA
k
A , { }A
δ , con las fuerzas del mismo extremo, { }A
F , de un elemento que
une los nodos A y B .
Sea:
F
2
F
1
F
3
A B
F
5
F
4
F
6
Dada la ecuación de equilibrio del nodo A , { } [ ] { }A
AA
A k
F δ
= :
a) Se puede aplicar un desplazamiento unitario en A en la dirección de
y obtener las fuerzas correspondientes del mismo nodo
1
F
A :
A
A
A
AA
L
EA
k
k
k
k
k
k
F
F
F
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
0
0
0
0
0
0
1
0
0
0
0 11
33
32
23
22
11
31
21
11
∴
L
EA
F =
11 , 0
31
21 =
= F
F
ANALISIS ESTRUCTURAL 47
48. F=
1
F
5
F
4
F
6
1
1
1
1
EA
L
1
Y por el equilibrio:
0
0
41
11 =
+
=
∑
F
F
Fx
∴
0
61
51
11
41
=
=
−
=
−
=
F
F
L
EA
F
F
41
F Será la fuerza o rigidez necesaria en el nodo B , para equilibrar los efectos
de nodo A , o sea, es la rigidez necesaria y única en
41
F B para equilibrar A .
b) De la misma manera, aplicando un desplazamiento unitario en A , en la
dirección de , se tiene que las fuerzas en nodo
2
F A son:
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
2
3
32
22
33
32
23
22
11
32
22
12
6
12
0
0
0
1
0
0
0
0
0
L
EI
L
EI
k
k
k
k
k
k
k
F
F
F
F =
32
F
6
F
4
F
5
2
2
2
6EI
L
F =
22
6EI
L
1
2
3
0
0
42 =
=
∑
F
Fx
0
0
52
22 =
+
=
∑
F
F
Fy
∴ 3
22
52
12
L
EI
F
F −
=
−
=
ANALISIS ESTRUCTURAL 48
49. 2
2
3
32
22
62
22
32
62
6
6
12
0
0
L
EI
L
EI
L
EIL
F
L
F
F
L
F
F
F
Mz
=
−
=
−
=
=
−
+
=
∑
c) Si se aplica un giro unitario en A en la dirección de , se tiene que las
fuerzas en el nodo
3
F
A son:
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
4
6
0
1
0
0
4
6
0
6
12
0
0
0
2
2
2
3
33
23
13
F =
33
F
6
F
4
F
5
3
3
3
4EI
L
F =
22
6EI
L
2
0
0
43 =
=
∑
F
Fx
0
0
23
53 =
+
=
∑
F
F
Fy
∴ 2
23
53
6
L
EI
F
F −
=
−
=
L
EI
L
EI
L
L
EI
F
L
F
F
L
F
F
F
M z
2
4
6
0
0
2
33
23
63
23
33
63
=
−
=
−
=
=
−
+
=
∑
Finalmente, aplicando estos desplazamientos unitarios en A se deducen
los efectos en B , por tanto:
[ ]
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
L
EI
L
EI
L
EI
L
EI
L
EA
k BA
2
6
0
6
12
0
0
0
2
2
3
ANALISIS ESTRUCTURAL 49
50. Dada la propiedad de simetría de la matriz de rigidez del elemento
estructural, se tiene:
[ ] [ ]T
BA
AB k
k =
Ensamblando la matriz de rigidez del elemento B
A − , se tiene:
[ ] ⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
−
=
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
6
5
4
3
2
1
2
2
3
2
2
2
3
2
3
6
5
4
3
2
1
2
6
0
6
12
0
0
0
2
6
0
4
6
0
6
12
0
6
12
0
0
0
0
0
δ
δ
δ
δ
δ
δ
L
EI
L
EI
k
L
EI
L
EI
L
EA
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
L
EA
F
F
F
F
F
F
BB
La ecuación de equilibrio del elemento se puede expresar también en
forma simplificada:
⎭
⎬
⎫
⎩
⎨
⎧
⎥
⎦
⎤
⎢
⎣
⎡
=
⎭
⎬
⎫
⎩
⎨
⎧
=
⎭
⎬
⎫
⎩
⎨
⎧
B
A
BB
BA
AB
AA
B
A
j
i
k
k
k
k
F
F
F
F
δ
δ
Para la obtención de la submatriz , se procede como sigue:
BB
k
a) Si se aplica un desplazamiento unitario en B en la dirección de se
conoce el efecto sobre
4
F
A y aplicando equilibrio se obtiene la rigidez en
B :
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
−
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
0
0
0
0
1
2
6
0
6
12
0
0
0
2
2
3
34
24
14
L
EA
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
Por equilibrio:
ANALISIS ESTRUCTURAL 50
51. F =
14
F
6
F
4
F
5
4
4
4
EA
L
δx= 1
A B
0
0
44 =
+
−
=
∑
F
L
EA
Fx
∴
L
EA
F =
44
b) Si se aplica un desplazamiento unitario en B , en la dirección de , se
conoce el efecto sobre
5
F
A y aplicando equilibrio se obtiene la rigidez en
B :
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
−
−
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
2
3
2
2
3
35
25
15
6
12
0
0
1
0
2
6
0
6
12
0
0
0
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
1
F
5
F
4
F
6
5
5
5
F =
35
6EI
L
2
F =
25
12EI
L
3
0
0
45 =
=
∑
F
Fx
0
12
0
3
55 =
−
=
∑
L
EI
F
Fy
∴ 3
55
12
L
EI
F =
0
12
6
0
3
2
65 =
+
−
=
∑
L
L
EI
L
EI
F
Mz
∴ 2
2
2
65
6
12
6
L
EI
L
EI
L
EI
F −
=
−
=
c) Si se aplica un giro unitario en B en la dirección , se conoce el efecto
en
6
F
A y aplicando equilibrio, se obtiene la rigidez en A :
ANALISIS ESTRUCTURAL 51
55. ⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
0
1
0
2
0
2
3
0
0
0
8
5
2
2
2
3
B
B
B
EI
L
EI
L
EI
L
EI
L
GA
kL
EA
L
z
z
z
0
2 =
B
EA
L
IV
⇒ ∴ 0
2 =
B
1
2
3
8
2
5
3
=
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+ B
EI
L
B
EI
L
GA
kL
V
⇒
0
2
8
5
2
=
+
− B
EI
L
B
EI
L
VI
⇒
De la ecuación VI se despeja , obteniéndose:
8
B
5
8
2
B
L
B = Este valor se sustituye en la ecuación V .
1
2
2
3
5
2
5
3
=
⎟
⎠
⎞
⎜
⎝
⎛
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+ B
L
EI
L
B
EI
L
GA
kL
⇒ 1
4
3
5
3
5
3
5 =
−
+ B
EI
L
B
EI
L
B
GA
kL
1
12
3
5 =
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
EI
L
GA
kL
B ⇒
EI
L
GA
kL
B
12
1
3
5
+
=
Simplificando el valor de obtenemos:
5
B
( )
3
3
3
5
12
12
12
12
12
12
1
L
GA
EIkL
EI
GA
GAL
EIkL
EIGA
EIGA
GAL
EIkL
B
+
=
÷
+
=
+
=
Si consideramos que
k
A
ar = y que
r
Ga
L
EI
2
12
=
α ; donde es el área efectiva de
cortante.
r
a
( )
1
12
1
12
12
12
12
3
2
3
3
5
+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
+
=
α
L
EI
Ga
L
EI
L
EI
L
Ga
EIL
EI
B
r
r
ANALISIS ESTRUCTURAL 55
56. ⎟
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎜
⎝
⎛
+
=
EI
L
GA
kL
L
B
12
1
2 3
8 ⇒
EI
L
GA
kL
L
B
6
2 3
8
+
=
Simplificamos el valor de :
8
B
( )
( )
1
6
1
12
6
1
12
6
12
6
12
6
12
6
12
6
6
12
6
2
2
2
2
2
2
2
2
3
3
3
3
8
+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
⎟
⎠
⎞
⎜
⎝
⎛
+
=
+
=
⎟
⎠
⎞
⎜
⎝
⎛
+
=
+
=
÷
+
=
+
=
+
=
α
L
EI
Ga
L
EI
L
EI
GA
L
EIk
L
EI
L
GA
EIk
EI
L
GA
EIk
L
EIL
L
GA
EIkL
EIL
GA
GA
L
EIkL
EILGA
EIGA
GA
L
EIkL
L
EI
L
GA
kL
L
B
r
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
1
0
0
2
0
2
3
0
0
0
9
6
3
2
2
3
B
B
B
EI
L
EI
L
EI
L
EI
L
GA
kL
EA
L
z
z
z
0
3 =
B
EA
L
VII
⇒ ∴ 0
3 =
B
0
2
3
9
2
6
3
=
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+ B
EI
L
B
EI
L
GA
kL
VIII
⇒
1
2
9
6
2
=
+
− B
EI
L
B
EI
L
IX
⇒
De la ecuación IX se despeja obteniéndose:
9
B
6
9
2
B
L
L
EI
B +
= Sustituimos este valor en la ecuación VIII .
ANALISIS ESTRUCTURAL 56
58. ( )
( )
( )
( )
( )
( )
1
4
1
12
4
12
1
12
4
12
1
12
3
12
12
3
12
12
3
12
12
3
12
12
3
12
12
3
3
12
3
4
2
3
2
2
2
3
2
2
2
3
2
2
2
2
3
2
2
2
2
3
2
2
2
2
3
2
2
2
2
3
3
3
2
2
3
2
3
2
3
2
9
+
+
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎠
⎞
⎜
⎝
⎛
+
=
⎟
⎠
⎞
⎜
⎝
⎛
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
+
=
+
+
+
=
÷
+
+
+
=
+
+
+
=
+
+
+
=
+
+
=
+
+
=
+
+
=
α
α
L
EI
Ga
L
EI
L
Ga
L
EI
EIL
GA
L
EIk
L
GA
L
EIk
EIL
GA
L
EIk
L
EI
EI
GA
L
k
I
E
L
L
GA
EIkL
EIL
EIL
GA
k
I
E
GA
GA
L
EIkL
GA
EIL
GA
EIL
k
I
E
GA
L
EIkL
L
GA
EIL
GA
EIL
k
I
E
L
GA
L
EIkL
L
GA
EIL
GA
EIL
kL
I
E
GA
L
EIkL
GA
EIL
L
EI
EIGA
GA
L
EIkL
L
L
EI
EI
L
GA
kL
L
L
EI
B
r
r
La matriz inversa que se obtiene es la siguiente:
( ) ( )
( )
( )
( )
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
+
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
3
2
1
2
2
3
3
2
1
1
4
1
6
0
1
6
1
12
0
0
0
δ
δ
δ
α
α
α
α
α
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
Esta ecuación se puede abreviar de la forma siguiente:
{ } [ ] { }A
AA
A k
F δ
=
Donde es una matriz de rigideces que relaciona los desplazamientos en el
extremo
[ ]AA
k
A , { }A
δ , con las fuerzas del mismo extremo, { }A
F , de un elemento que
une los nodos A y B .
Sea:
ANALISIS ESTRUCTURAL 58
59. F
2
F
1
F
3
A B
F
5
F
4
F
6
Dada la ecuación de equilibrio del nodo A , { } [ ] { }A
AA
A k
F δ
= :
a) Se puede aplicar un desplazamiento unitario en A en la dirección de
y obtener las fuerzas correspondientes del mismo nodo
1
F
A :
( ) ( )
( )
( )
( )
⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
+
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
0
0
0
0
1
1
4
1
6
0
1
6
1
12
0
0
0
2
2
2
31
21
11
L
EA
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
α
α
α
α
α
∴
L
EA
F =
11 , 0
31
21 =
= F
F
F=
1
F
5
F
4
F
6
1
1
1
1
EA
L
1
Y por el equilibrio:
0
0
41
11 =
+
=
∑
F
F
Fx
∴
0
61
51
11
41
=
=
−
=
−
=
F
F
L
EA
F
F
41
F Será la fuerza o rigidez necesaria en el nodo B , para equilibrar los efectos
de nodo A , o sea, es la rigidez necesaria y única en
41
F B para equilibrar A .
b) De la misma manera, aplicando un desplazamiento unitario en A , en la
dirección de , se tiene que las fuerzas en nodo
2
F A son:
ANALISIS ESTRUCTURAL 59
60. ( ) ( )
( )
( )
( )
( )
( )⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
+
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
+
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
1
6
1
12
0
0
1
0
1
4
1
6
0
1
6
1
12
0
0
0
2
3
2
2
2
32
22
11
α
α
α
α
α
α
α
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
F =
32
F
6
F
4
F
5
2
2
2
L(α+ 1)
F =
22
12EI
L(α+ 1)
1
2
3
6EI
0
0
42 =
=
∑
F
Fx
0
0
52
22 =
+
=
∑
F
F
Fy
3
22
52
12
L
EI
F
F −
=
−
=
∑ = 0
Mz
0
)
(
22
32
62 =
−
+ L
F
F
F
0
)
1
(
)
(
12
)
1
(
6
2
2
62 =
+
−
+
+
a
L
L
EI
a
L
EI
F
0
)
1
(
12
)
1
(
6
2
2
62 =
+
−
+
+
a
L
EI
a
L
EI
F
)
1
(
6
2
62
+
=
a
L
EI
F
c) Si se aplica un giro unitario en A en la dirección de , se tiene que las
fuerzas en el nodo
3
F
A son:
ANALISIS ESTRUCTURAL 60
61. ( ) ( )
( )
( )
( )
( )
( )
( ) ⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
+
+
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
+
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
1
4
1
6
0
1
0
0
1
4
1
6
0
1
6
1
12
0
0
0
2
2
2
2
33
23
13
α
α
α
α
α
α
α
α
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
F =
33
F
6
F
4
F
5
3
3
3
EI(α+ 4)
L(α+ 1)
F =
23 L(α+ 1)
2
6EI
0
0
43 =
=
∑
F
Fx
0
0
23
53 =
+
=
∑
F
F
Fy
∴
( )
1
6
2
23
53
+
−
=
−
=
α
L
EI
F
F
( )
( ) ( )
( )
( ) ( )
( )
( )
α
α
α
α
α
α
α
α
+
−
=
+
+
+
+
−
=
+
+
+
+
−
=
−
=
=
−
+
=
∑
1
2
1
6
1
4
1
6
1
4
0
0
2
33
23
63
23
33
63
L
EI
L
EI
L
EI
L
L
EI
L
EI
F
L
F
F
L
F
F
F
M z
Finalmente, aplicando estos desplazamientos unitarios en A se deducen
los efectos en B , por tanto:
[ ]
( ) ( )
( )
( )
( ) ⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
+
+
−
+
−
−
=
α
α
α
α
α
1
2
1
6
0
1
6
1
12
0
0
0
2
2
3
L
EI
L
EI
L
EI
L
EI
L
EA
k BA
Dada la propiedad de simetría de la matriz de rigidez del elemento
estructural, se tiene:
ANALISIS ESTRUCTURAL 61
62. [ ] [ ]T
BA
AB k
k =
Ensamblando la matriz de rigidez del elemento B
A − , se tiene:
( ) ( ) ( ) ( )
( )
( )
( ) ( )
( )
( )
( ) ( )
[ ]
( )
( )
( )
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
+
+
−
+
−
−
+
−
+
−
+
+
+
+
+
−
+
+
−
=
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
6
5
4
3
2
1
2
2
3
2
2
2
3
2
3
6
5
4
3
2
1
1
2
1
6
0
1
6
1
12
0
0
0
1
2
1
6
0
1
4
1
6
0
1
6
1
12
0
1
6
1
12
0
0
0
0
0
δ
δ
δ
δ
δ
δ
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
L
EI
L
EI
k
L
EI
L
EI
L
EA
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
L
EA
F
F
F
F
F
F
BB
La ecuación de equilibrio del elemento se puede expresar también en
forma simplificada:
⎭
⎬
⎫
⎩
⎨
⎧
⎥
⎦
⎤
⎢
⎣
⎡
=
⎭
⎬
⎫
⎩
⎨
⎧
=
⎭
⎬
⎫
⎩
⎨
⎧
B
A
BB
BA
AB
AA
B
A
j
i
k
k
k
k
F
F
F
F
δ
δ
Para la obtención de la submatriz , se procede como sigue:
BB
k
b) Si se aplica un desplazamiento unitario en B en la dirección de se
conoce el efecto sobre
4
F
A y aplicando equilibrio se obtiene la rigidez en
B :
( )
( )
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
+
−
+
+
−
−
=
⎪
⎩
⎪
⎨
⎧
⎪
⎭
⎪
⎬
⎫
0
0
0
0
1
1
2
)
1
(
6
0
)
1
(
6
)
1
(
12
0
0
0
2
2
3
34
24
14
L
EA
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
α
α
α
α
α
Por equilibrio:
ANALISIS ESTRUCTURAL 62
63. F =
14
F
6
F
4
F
5
4
4
4
EA
L
δx= 1
A B
0
0
44 =
+
−
=
∑
F
L
EA
Fx
∴
L
EA
F =
44
b) Si se aplica un desplazamiento unitario en B , en la dirección de , se
conoce el efecto sobre
5
F
A y aplicando equilibrio se obtiene la rigidez en
B :
( )
( ) ⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
+
−
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
+
−
+
+
−
−
=
⎪
⎩
⎪
⎨
⎧
⎪
⎭
⎪
⎬
⎫
)
1
(
6
)
1
(
12
0
0
1
0
1
2
)
1
(
6
0
)
1
(
6
)
1
(
12
0
0
0
2
3
2
2
3
35
25
15
α
α
α
α
α
α
α
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
1
F
5
F
4
F
6
5
5
5
F =
35
F =
25
L(α+ 1)
2
L(α+ 1)
3
6EI
12EI
0
0
45 =
=
∑
F
Fx
( )
0
1
12
0
3
55 =
+
−
=
∑
α
L
EI
F
Fy
∴ ( )
1
12
3
55
+
=
α
L
EI
F
( ) ( )
0
1
12
1
6
0
3
2
65 =
+
+
+
−
=
∑
L
L
EI
L
EI
F
Mz
α
α
∴ ( ) ( ) ( )
1
6
1
12
1
6
2
2
2
65
+
−
=
+
−
+
=
α
α
α L
EI
L
EI
L
EI
F
b) Si se aplica un giro unitario en B en la dirección , se conoce el efecto
en
6
F
A y aplicando equilibrio, se obtiene la rigidez en A :
ANALISIS ESTRUCTURAL 63
64. ( )
( )
( )
( ) ⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
+
−
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
+
−
+
+
−
−
=
⎪
⎩
⎪
⎨
⎧
⎪
⎭
⎪
⎬
⎫
α
α
α
α
α
α
α
α
1
2
)
1
(
6
0
1
0
0
1
2
)
1
(
6
0
)
1
(
6
)
1
(
12
0
0
0
2
2
2
3
36
26
16
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
F
F
F
F
6
F
4
F
5
6
6
6
F =
26 2
F =
36
EI(2-α)
L(α+ 1)
6EI
L(α+ 1)
0
0
46 =
=
∑
F
Fx
( )
0
1
6
0
2
56 =
+
+
=
∑
α
L
EI
F
Fy
∴ ( )
1
6
2
56
+
−
=
α
L
EI
F
( )
( ) ( )
0
1
6
1
2
0
2
66 =
+
−
+
−
+
=
∑
L
L
EI
L
EI
F
Mz
α
α
α
∴ ( )
( )
1
4
66
+
+
=
α
α
L
EI
F
Finalmente la matriz de rigidez es:
BB
k
[ ]
( ) ( )
( )
( )
( ) ⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
−
+
−
+
=
1
4
1
6
0
1
6
1
12
0
0
0
2
2
3
α
α
α
α
α
L
EI
L
EI
L
EI
L
EI
L
EA
kBB
La matriz de rigidez del elemento AB :
ANALISIS ESTRUCTURAL 64
65. [ ]
( ) ( ) ( ) ( )
( )
( )
( ) ( )
( )
( )
( ) ( ) ( ) ( )
( )
( )
( ) ( )
( )
( ) ⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
+
+
−
+
−
+
+
−
+
+
−
+
−
−
+
−
+
−
+
+
+
+
+
−
+
+
−
=
1
4
1
6
0
1
2
1
6
0
1
6
1
12
0
1
6
1
12
0
0
0
0
0
1
2
1
6
0
1
4
1
6
0
1
6
1
12
0
1
6
1
12
0
0
0
0
0
2
2
2
3
2
3
2
2
2
3
2
3
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
α
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
L
EA
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EI
L
EA
L
EA
k
Y la ecuación de equilibrio del elemento es:
[ ] [ ]{ }
δ
δ
δ
k
k
F
F
B
A
B
A
=
⎭
⎬
⎫
⎩
⎨
⎧
=
⎭
⎬
⎫
⎩
⎨
⎧
Como ya se había mencionado, el coeficiente de forma para
secciones rectangulares, a continuación se efectúa la demostración:
2
.
1
=
k
∫∫
=
A y
z
z
dA
b
I
Q
k 2
2
2
ρ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
= 2
2
4
2
y
h
b
Q
A
I
=
2
ρ
12
3
bh
I = bh
A =
Desarrollando la integral:
ANALISIS ESTRUCTURAL 65
66. ( ) ( ) ( )
( ) ( ) ( ) 2
.
1
160
36
2
8
6
2
8
9
2
160
72
8
12
8
18
160
72
8
12
8
18
160
36
2
8
6
2
8
9
2
5
36
6
8
18
36
18
8
18
36
18
8
18
16
576
288
36
36
16
16
8
36
2
16
36
4
4
4
144
4
4
12
12
1
4
2
2
/
2
/
2
/
2
/
2
/
2
/
2
/
2
/
2
/
2
/
2
/
2
/
2
/
2
/
5
5
3
3
5
4
3
2
5
4
3
2
5
4
2
2
4
5
4
2
2
4
5
4
2
2
4
5
2
2
2
2
2
5
3
2
2
2
2
2
3
3
2
2
2
=
+
−
=
⎥
⎦
⎤
+
−
=
+
−
=
+
−
=
⎥
⎦
⎤
+
−
=
+
−
=
+
−
=
+
−
=
+
−
=
+
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
∫
∫ ∫ ∫ ∫
∫∫
∫∫
∫∫
∫∫ ∫∫ ∫∫
∫∫
−
−
− − − −
−
b
b
b
b
b
b
h
h
b
b
b
b
h
h
A
A
A
A A A
A
b
x
b
x
b
x
dx
b
b
b
dx
b
b
b
dx
bh
y
bh
y
bh
y
dydx
bh
y
bh
y
bh
dA
bh
y
bh
y
bh
dA
bh
y
y
h
h
dA
bh
y
y
h
h
dA
bh
y
y
h
h
dA
bh
b
y
h
b
dA
h
b
y
h
b
dA
b
bh
bh
bh
y
h
b
k
Ejemplo.
ANALISIS ESTRUCTURAL 66
67. Obtención de la matriz de flexibilidades y de rigideces de un elemento de
sección constante en el espacio tridimensional.
Sea:
L
F
2
F
6
y
F
8
F
12
F
7
F
10
F
11
z
F
4
F
1
F
3
F
9
x
i
A
j
B
F
5
Lo que se busca es establecer la ecuación de equilibrio del elemento en
función de los desplazamientos y de las fuerzas aplicadas en los nodos extremos
de la barra.
Para la obtención de la matriz de flexibilidades del elemento se puede
proceder como sigue:
La energía de deformación del elemento con comportamiento lineal se
puede expresar como:
∫ ∫ ∫ ∫ ∫
∫ +
+
+
+
+
=
L L L L L
y
y
z
m
x
z
z
y
L
x
dx
EJ
M
dx
GA
V
k
dx
GJ
M
dx
EI
M
dx
GA
V
k
dx
EA
N
W
0 0 0 0 0
2
2
2
1
0
2
2
2
2
2
2
2
(1)
Haciendo un corte y verificando el equilibrio, se pueden obtener las
variaciones de las fuerzas internas como sigue:
F
2
F
6
y
Nx
V
z
z
F
4
F
1
F
3
M
x
F
5
x
Vy
My
Mz
∑ = 0
Fx
ANALISIS ESTRUCTURAL 67
68. 0
.
1 =
− x
N
F ∴ 1
F
Nx =
∑ = 0
Fy
0
2 =
− y
V
F ∴ 2
F
Vy =
∑ = 0
Fz
0
5 =
− z
V
F ∴ 5
F
Vz =
∑ = 0
Mx
0
4 =
− Mx
F ∴ 4
F
Mx =
∑ = 0
My
0
5
6 =
−
− My
x
F
F ∴ x
F
F
My 5
6 −
=
∑ = 0
Mz
0
2
3 =
−
− Mz
x
F
F ∴ x
F
F
Mz 2
3 −
= (2) todas las anteriores.
Sustituyendo las valores de , , , , y en la ecuación 1 se tiene:
x
N y
V z
V x
M y
M z
M
( ) ( )
L
y
y
m
z
z
L
y
m
z
L
y
m
z
EI
x
F
EI
x
F
F
x
F
GA
x
F
k
GJ
x
F
EI
x
F
EI
x
F
F
x
F
x
GA
F
k
x
EA
F
dx
EI
x
F
x
F
F
F
GA
F
k
GJ
F
EI
x
F
x
F
F
F
GA
F
k
EA
F
dx
EI
x
F
F
GA
F
k
GJ
F
EI
x
F
F
GA
F
k
EA
F
W
0
3
2
5
2
6
5
2
6
2
5
2
2
4
3
2
2
2
3
2
2
3
2
2
1
2
1
0
2
2
5
6
5
2
6
2
5
2
2
4
2
2
2
3
2
2
3
2
2
1
2
1
0
2
5
6
2
5
2
2
4
2
2
3
2
2
1
2
1
6
2
2
2
6
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
⎥
⎥
⎦
⎤
+
−
+
+
+
+
−
+
+
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡ +
−
+
+
+
+
−
+
+
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡ −
+
+
+
−
+
+
=
∫
∫
y
y
m
z
z EI
L
F
EI
L
F
F
L
F
GA
L
F
k
GJ
L
F
EI
L
F
EI
L
F
F
L
F
GA
L
F
k
EA
L
F
W
6
2
2
2
6
2
2
2
3
2
5
2
6
5
2
6
2
5
2
2
4
3
2
2
2
3
2
2
3
2
2
1
2
1
+
−
+
+
+
+
−
+
+
=
(3)
De acuerdo al teorema de Castigliano:
i
i
F
W
δ
=
∂
∂
EA
LF
F
W 1
1
1
=
=
∂
∂
δ
ANALISIS ESTRUCTURAL 68
69. 3
2
2
3
1
2
3
3
2
2
1
2
2 2
3
3
2
F
EI
L
F
EI
L
GA
L
k
EI
F
L
F
EI
L
F
GA
L
k
F
W
z
z
z
z
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
+
−
=
=
∂
∂
δ
2
2
3
3
3 2
F
EI
L
F
EI
L
F
W
z
z
−
=
=
∂
∂
δ
4
4
4
F
GJ
L
F
W
m
=
=
∂
∂
δ
6
2
5
3
2
5
3
6
2
5
2
5
5 2
3
3
2
F
EI
L
F
EI
L
GA
L
k
F
EI
L
F
EI
L
F
GA
L
k
F
W
y
y
y
y
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
+
−
=
=
∂
∂
δ
5
2
6
6
6 2
F
EI
L
F
EI
L
F
W
y
y
−
=
=
∂
∂
δ (4) todas las anteriores.
Expresando las ecuaciones anteriores en forma matricial se tiene:
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎨
⎧
6
5
4
3
2
1
2
2
3
2
2
2
3
1
6
5
4
3
2
1
2
0
0
0
0
2
3
0
0
0
0
0
0
0
0
0
0
0
0
2
0
0
0
0
2
3
0
0
0
0
0
0
F
F
F
F
F
F
EI
L
EI
L
EI
L
EI
L
GA
L
k
GJ
L
EI
L
EI
L
EI
L
EI
L
GA
L
k
EA
L
y
y
y
y
m
z
z
z
z
δ
δ
δ
δ
δ
δ
(5)
En forma abreviada { } [ ] { }i
ii
i F
f
=
δ (6)
Donde es una matriz de flexibilidades, que relaciona las fuerzas en el
extremo
[ ]ii
f
A , , , con los desplazamientos del mismo extremo i ,
i { }i
F { }i
δ de un
elemento en el espacio , que une los nodos i y .
D
3 j
Por otro lado, las fuerzas { se pueden despejar de la ecuación 6 de la
siguiente manera:
}i
F
ANALISIS ESTRUCTURAL 69
70. { } { } { } [ ] { }i
ii
i
ii
i k
f
F δ
δ =
=
−1
CAPÍTULO 6. OBTENCIÓN DE LA MATRIZ DE RIGIDEZ DE UN ELEMENTO DE SECCIÓN
VARIABLE.
ANALISIS ESTRUCTURAL 70
71. 6.1 Introducción.
Para el caso particular de sistemas estructurales construidos a base de
elementos de sección variable, la metodología antes descrita sigue siendo
aplicable y requiere únicamente la definición de la matriz de rigidez de este
tipo de elementos en coordenadas locales.
Partiendo de la energía de deformación de un elemento plano se
obtiene la relación entre fuerzas y desplazamientos de un nodo extremo del
elemento, a través de la matriz de flexibilidades. Por otro lado, se deduce la
matriz de rigidez del nodo mencionado, invirtiendo simplemente la matriz de
flexibilidades. Después, aplicando desplazamientos unitarios y por equilibrio de
fuerzas se deduce la matriz de rigidez para ambos extremos del elemento de
sección variable. Finalmente, como un ejemplo de este trabajo se obtiene la
matriz de rigidez de un elemento de sección variable rectangular llena.
6.2 Matriz de rigidez de un elemento de sección variable.
Para la obtención de la matriz de rigidez de un elemento de sección
variable con fuerzas o desplazamientos aplicados en los nodos extremos (figura
6-1), se puede proceder como a continuación se describe.
La energía de deformación para un elemento plano con
comportamiento lineal se puede expresar como:
dx
EI
M
GA
V
k
EA
N
W
L
z
z
y
∫ ⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
+
=
0
2
2
1
2
2
2
2
(6-1)
x
y
z
F
1
F
2
F
3
M
N
V
A B
x
Figura 6-1.Elemento sujeto a fuerzas en los nodos extremos.
Donde, por equilibrio:
ANALISIS ESTRUCTURAL 71
72. ( )
( )
( ) x
F
F
x
M
F
x
V
F
x
N
z 2
3
2
1
−
=
=
=
(6-2)
Sustituyendo los valores de N , V y M en la ecuación 6-1 se obtiene:
( )
( )
( ) ( )
( ) ( ) ( )
∫
∫
⎥
⎦
⎤
⎢
⎣
⎡
+
+
−
+
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
−
+
=
L
z
L
z
dx
x
GA
F
k
x
EI
x
F
x
F
F
F
x
EA
F
W
dx
x
GA
F
k
x
EI
x
F
F
x
EA
F
W
0
2
2
1
2
2
2
3
2
2
3
2
1
0
2
2
1
2
2
3
2
1
2
2
2
2
2
2
2
(6-3)
De acuerdo al teorema de Castigliano:
i
i
F
W
δ
=
∂
∂
(6-4)
∴ 1
0
0
1
1
1 )
(
)
(
F
x
EA
dx
dx
x
EA
F
F
W L
L
⎥
⎦
⎤
⎢
⎣
⎡
=
=
=
∂
∂
∫
∫
δ
( ) ( ) ( )
∫ ∫
∫ ⎥
⎦
⎤
⎢
⎣
⎡
−
⎭
⎬
⎫
⎩
⎨
⎧
⎥
⎦
⎤
⎢
⎣
⎡
+
=
⎥
⎦
⎤
⎢
⎣
⎡
+
−
=
=
∂
∂ L L
z
L
z
z
F
x
EI
xdx
F
dx
x
GA
k
x
EI
x
dx
x
GA
F
k
x
EI
x
F
x
F
F
W
0
3
0
2
0
1
2
2
1
3
2
2
2
2 )
(
)
(
2
2
2
2
2
δ
( ) ( ) ( )
∫ ∫
∫ ⎥
⎦
⎤
⎢
⎣
⎡
+
⎥
⎦
⎤
⎢
⎣
⎡
−
=
⎥
⎦
⎤
⎢
⎣
⎡ +
−
=
=
∂
∂ L L
z
L
z
z
F
x
EI
dx
F
x
EI
xdx
dx
x
EI
F
x
F
F
W
0
3
0
2
0
3
2
3
3 2
2
2
δ (6-5)
Expresando estas relaciones en forma matricial se tiene:
( )
( ) ( ) ( )
( ) ( )
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
∫
∫
∫
∫
∫
3
2
1
0
0
0
0
1
2
0
3
2
1
0
0
0
0
F
F
F
x
EI
dx
x
EI
xdx
x
EI
xdx
dx
x
GA
k
x
EI
x
x
EA
dx
L
z
L
z
L
z
L
z
L
δ
δ
δ
[ ]
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
3
2
1
33
32
23
22
11
3
2
1
3
2
1
0
0
0
0
F
F
F
f
f
f
f
f
F
F
F
f AA
δ
δ
δ
(6-6)
De acuerdo a lo anteriormente expuesto (ecuación 6-6), la matriz de
flexibilidades del nodo A es:
ANALISIS ESTRUCTURAL 72
73. [ ]
( )
( ) ( ) ( )
( ) ( ) ⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−
−
=
∫
∫
∫
∫
∫
L
z
L
z
L
z
L
z
L
AA
x
EI
dx
x
EI
xdx
x
EI
xdx
dx
x
GA
k
x
EI
x
x
EA
dx
f
f
f
f
f
f
0
0
0
0
1
2
0
33
32
23
22
11
0
0
0
0
0
0
0
0
(6-7)
Dada esta matriz de flexibilidades del nodo A , (ecuación 6-7), y la
relación que existe entre las fuerzas y desplazamientos de un mismo nodo
extremo de un elemento (figura 6-2), se puede proceder como sigue, para la
obtención de la matriz de rigidez completa de un elemento de sección
variable.
x
F ,
2
A B
L
Figura 6-2.Fuerzas y desplazamientos en los nodos extremos del elemento.
δ2 F ,
1 δ1
F ,
3
δ3
F,
5 δ5
F,
6 δ6
F ,
4 δ4
A partir de la ecuación 6-7, se obtiene para el nodo A la relación
siguiente:
[ ] [ ]{ } [ ] { } { }A
A
A
A
A
A
D
f
D
f
D
f
D
f
f
f
k
F δ
δ
δ
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
=
=
−
22
23
23
33
11
1
0
0
0
0
1
(6-8)
Donde [ AA
k ] es la matriz de rigidez del nodo A y el determinante es:
2
23
33
22 f
f
f
Det
D −
=
= .
a) Dado un desplazamiento unitario en A en la dirección de 1
F (figura 6-3),
se pueden obtener las fuerzas en el nodo A y por equilibrio deducir las
fuerzas en el nodo B:
ANALISIS ESTRUCTURAL 73
74. ⎪
⎪
⎭
⎪
⎪
⎬
⎫
⎪
⎪
⎩
⎪
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
0
0
1
0
0
0
0
1
0
0
0
0
11
11
33
32
23
22
11
31
21
11 f
k
k
k
k
k
k
F
F
F
(6-9)
,
0
61
51 =
= F
F
11
11
41
1
f
F
F −
=
−
= (6-10)
x
F
21
A B
L
Figura 6-3.Fuerzas provocadas por un desplazamiento unitario en la dirección F1.
F
11
F
31
F
51
F
61
F
41
δ = 1
1
b) De la misma manera, se aplica un desplazamiento unitario en A en la
dirección de 2
F (figura 6-4), para obtener las fuerzas en el nodo A y por
equilibrio deducir las fuerzas en el nodo B.
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
D
f
D
f
k
k
k
k
k
k
k
F
F
F
23
33
32
22
33
32
23
22
11
32
22
12
0
0
0
1
0
0
0
0
0
(6-11)
,
0
12 =
F ,
33
22
D
f
F =
D
f
F 23
32 =
(6-12)
,
0
42 =
F ,
33
22
52
D
f
F
F
−
=
−
=
D
f
L
f
F
x
F
F 23
33
32
22
62
−
=
−
=
ANALISIS ESTRUCTURAL 74
75. x
F
22
A B
L
Figura 6-4.Fuerzas provocadas por un desplazamiento unitario en la dirección F2.
F
12
F
32
F
52
F
62
F
42
δ = 1
2
c) Finalmente, se aplica un desplazamiento unitario en A (figura 6-5), en la
dirección 3
F , para obtener las fuerzas en el nodo A y por equilibrio
deducir las fuerzas en el nodo B.
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎬
⎫
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎪
⎭
⎪
⎬
⎫
⎪
⎩
⎪
⎨
⎧
D
f
D
f
k
k
k
k
k
k
k
F
F
F
22
23
33
23
33
32
23
22
11
32
22
16
0
0
1
0
0
0
0
0
0
(6-13)
x
F
23
A B
L
Figura 6-5.Fuerzas provocadas por un desplazamiento unitario en la dirección F3.
F
13
F
33
F
53
F
63
F
43
δ = 1
3
,
0
13 =
F ,
22
33
D
f
F =
D
f
F 23
23 =
(6-14)
,
0
43 =
F ,
23
53
D
f
F −
=
D
f
L
f
F 22
23
63
−
=
Por lo tanto la submatriz de rigidez AB es:
ANALISIS ESTRUCTURAL 75
76. ⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
=
D
f
L
f
D
f
D
f
L
f
D
f
f
kAB
22
23
23
23
33
33
11
0
0
0
0
1
(6-15)
Y por simetría de la matriz de rigidez del elemento se tiene que:
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
=
=
D
f
L
f
D
f
L
f
D
f
D
f
f
k
k
T
BA
BA
22
23
23
33
23
33
11
0
0
0
0
1
(6-16)
Dado que se conoce la submatriz de rigidez [ ]
BA
k , se conocen también las
fuerzas producidas en el nodo A por los efectos de los desplazamientos unitarios
en B, por tanto se puede por equilibrio deducir las fuerzas y rigideces en el nodo
B, (figura 6-6, 6-7 y 6-8).
x
F
24
A B
L
Figura 6-6.Fuerzas provocadas por un desplazamiento unitario en la dirección F4.
F
14
F
34
F
54
F
64
F
44
δ = 1
1
,
1
11
14
44
f
F
F =
= ,
0
34
24 =
= F
F 0
64
54 =
= F
F (6-17)
ANALISIS ESTRUCTURAL 76
77. x
F
25
A B
L
Figura 6-7.Fuerzas provocadas por un desplazamiento unitario en la dirección F5.
F
15
F
35
F
55
F
65
F
45
δ = 1
5
,
0
15 =
F ,
33
25
D
f
F =
D
f
F 23
35 =
(6-18)
,
0
15
45 =
= F
F ,
33
25
55
D
f
F
F =
=
D
L
f
f
L
F
F
F 33
23
25
35
65
−
=
−
=
x
F
26
A B
L
Figura 6-8.Fuerzas provocadas por un desplazamiento unitario en la dirección F6.
F
16
F
36
F
56
F
66
F
46
δ = 1
6
,
0
16 =
F ,
23
33
26
D
f
L
f
F
−
=
D
f
L
f
F 22
23
36
−
=
,
0
16 =
F ,
33
23
56
56
D
L
f
f
F
F
−
=
−
= 36
26
33 F
L
F
F −
= (6-19)
( )
D
L
f
f
L
f
D
f
L
f
D
L
f
L
f
F 23
22
2
33
22
23
23
33
33
2
−
+
=
−
−
−
=
ANALISIS ESTRUCTURAL 77
78. La matriz resultante en B es:
[ ]
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
−
−
=
D
L
f
L
f
f
D
L
f
f
D
L
f
f
D
f
f
kBB
2
33
23
22
33
23
33
23
33
11
2
0
0
0
0
1
(6-20)
Ensamblando las submatrices obtenidas, de las ecuaciones 6-8, 6-15, 6-16
y 6-20, se obtiene la matriz de rigideces de un elemento A-B de sección
variable:
[ ]
[ ] [ ]
[ ] [ ]
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
+
−
−
−
−
−
−
−
−
−
−
−
−
−
=
⎥
⎦
⎤
⎢
⎣
⎡
=
D
L
f
L
f
f
D
L
f
f
D
f
L
f
D
f
L
f
D
L
f
f
D
f
D
f
D
f
f
f
D
f
L
f
D
f
D
f
D
f
D
f
L
f
D
f
D
f
D
f
f
f
k
k
k
k
k
BB
BA
AB
AA
2
33
23
22
33
23
22
23
23
33
33
23
33
23
33
11
11
22
23
23
22
23
23
33
33
23
33
11
11
2
0
0
0
0
0
0
1
0
0
1
0
0
0
0
0
0
1
0
0
1
(6-21)
Renombrando los términos iguales, esta matriz se puede representar como:
[ ]
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎣
⎡
−
−
−
−
−
−
−
−
=
66
26
36
26
26
22
23
22
11
11
36
23
33
23
26
22
23
22
11
11
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k (6-22)
Donde:
,
1
11
11
f
k = ,
33
22
D
f
k = ,
23
23
D
f
k =
D
f
k 22
33 =
(6-23)
,
23
33
26
D
f
L
f
k
−
= ,
22
23
36
D
f
L
f
k
−
=
D
f
L
f
L
f
k 22
23
2
33
66
2 +
−
=
ANALISIS ESTRUCTURAL 78
79. 6.3 Ejemplo de una viga de sección variable rectangular.
Sea un elemento de sección variable rectangular llena, como el
mostrado en la figura 6-9. En este caso en particular, el peralte varía linealmente
a lo largo de la longitud, y tanto el área como el momento de inercia se
pueden expresar en función de x.
( ) x
L
h
h
h
x
h 1
2
1
−
+
=
(6-24)
⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
= x
L
h
h
h
b
x
bh
x
A 1
2
1
)
(
)
( e
3
1
2
1
3
12
12
)
(
)
( ⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
= x
L
h
h
h
b
x
bh
x
I
L
b
b
x
Figura 6-9.Elemento de sección variable rectangular llena.
h1
h2
De acuerdo con el capítulo anterior se puede obtener la matriz de
rigideces a partir de la matriz de flexibilidades, o de los términos de la matriz de
flexibilidades, 11
f , 22
f , 23
f y 33
f :
( )
∫ ∫ ∫ −
+
=
⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
=
L L L
x
L
h
h
h
dx
Eb
x
L
h
h
h
Eb
dx
x
EA
dx
f
0 0 0 1
2
1
1
2
1
11
1
(6-25)
Haciendo un cambio de variable:
ANALISIS ESTRUCTURAL 79
80. ,
1
2
1 x
L
h
h
h
u
−
+
= dx
L
h
h
du 1
2 −
= (6-26)
,
1
2
du
h
h
L
dx
−
= :
límites ;
0 1
h
u
x =
→
= 2
h
u
L
x =
→
=
La integral se convierte en:
( ) ( )
( )
( )
( ) ( )
[ ]
∫
∫ −
−
=
⎥
⎦
⎤
−
=
−
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
− 2
1
2
1
2
1
1
2
1
2
1
2
1
2
1
2
1
h
h
h
h
h
h
h
In
h
In
h
h
Eb
L
u
In
h
h
Eb
L
u
du
h
h
Eb
L
u
du
h
h
L
Eb
(6-27)
Por consiguiente se tiene que el primer término de la matriz de flexibilidades es:
( ) ⎥
⎦
⎤
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
1
2
1
2
11
h
h
In
h
h
Eb
L
f (6-28)
El siguiente término es:
( ) ( )
∫ ∫
+
=
L L
x
GA
dx
k
x
EI
dx
x
f
0 0
1
2
22 (6-29)
Tomando el primer término de la integral:
( )
∫ ∫
⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
L L
x
L
h
h
h
dx
x
Eb
x
EI
dx
x
0 0
3
1
2
1
2
2
12
(6-30)
Y haciendo un cambio de variables:
,
1
2
1 x
L
h
h
h
u
−
+
= ,
1
2
1
L
h
h
h
u
x
−
−
=
( )
,
2 2
2
1
2
2
1
1
2
2
L
h
h
h
uh
u
x
−
+
−
=
,
1
2
dx
L
h
h
du
−
= du
h
h
L
dx
1
2 −
= (6-31)
Con límites: sí 1
0 h
u
x =
→
= y si 2
h
u
L
x =
→
=
La integral se convierte en:
ANALISIS ESTRUCTURAL 80