
Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (16)
Similar to Deploying 3D P-Cable for Climate Evidence
Similar to Deploying 3D P-Cable for Climate Evidence (20)
Deploying 3D P-Cable for Climate Evidence
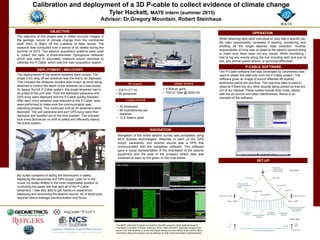
- 1. Calibration and deployment of a 3D P-cable to collect evidence of climate change Tyler Hackett, MATE intern (summer 2015) Advisor: Dr.Gregory Mountain, Robert Steinhaus The objective of this project was to obtain acoustic images of the geologic record of climate change from the continental shelf 30km to 80km off the coastline of New Jersey. The research was conducted over a period of six weeks during the summer of 2015. Two seismic acquisition systems were used to collect the data, a three-kilometer hydrophone streamer which was used to accurately measure sound velocities to calibrate the P-Cable, which was the main acquisition system. • 235 Ft (71 m) • 55 personnel DEPLOYMENT / RECOVERY OBJECTIVE OPERATION RV Langseth SIESMIC SOURCE • 4 Bolt air guns • 700 in3 Total @ 2000 PSI P-CABLE SYSTEM • 24 streamers • 96 Hydrophones per streamer • 12.5 meters apart SET-UP Navigation of the entire seismic survey was completed using NCS Subsea technologies. Attached to each of the GPS buoys, paravanes, and seismic source was a GPS that communicated with the navigation software. This software gave a visual representation of the orientation of the seismic equipment and the area of the prospect where data was obtained as seen by the green on the map below. While obtaining data each individual on duty had a specific job. My main responsibility consisted of starting, monitoring, and shutting off the single steamer data collection. Another responsibility of mine was to observe the seismic source string to make sure there were not any issues. While monitoring I had to log any events along the line including start and end of line, any animal power-downs, or technical difficulties. The deployments of the seismic systems were unique. The single 3-km long off-set streamer was the first to be deployed. This included the streamer levelers also known as birds being attached to control the depth of the streamer as it was towed. To deploy the full P-Cable system, the single streamer had to be pulled to the port side. Then the starboard paravane and GPS buoy were deployed and the P-Cable quickly followed. After each short streamer was attached to the P-Cable, tests were performed to make sure the communication was operating properly. This continued until all 24 streamers were deployed. The port paravane and port GPS buoy were then deployed and spooled out to the final position. This process took every technician on shift to safely and efficiently deploy the entire system. My duties consisted of aiding the technicians in safely deploying the paravanes and GPS buoys. Later on in the cruise my duties shifted to the more responsible position of controlling the spare reel that held all of the P-Cable streamers. I was also able to get hands-on experience deploying and recovering the seismic source. All of these jobs required above average communication and focus. NAVIGATION P-CABLE SOFTWARE The P-Cable software that was developed by Geometrics was used to obtain the data only from the P-Cable system. This software gives an image of sound reflected off layered sediments below the sea floor. The real time data is used to observe if there are any other sounds being picked up that are not of our interest. These noises include ship noise, issues with the air source and other interferences. Below is an example of the software. The MATE Internship Program is funded by the REU program of the National Science Foundation’s Division of Ocean Sciences. Since 1999, the MATE internship program has placed over 300 students in at-sea internships lasting from two weeks to six months. More information about the program can be obtained at: http://www.marinetech.org/internships/