
Recommandé
Contenu connexe
En vedette
Similaire à Electrical Characteristics of Bicycle Dynamos
Similaire à Electrical Characteristics of Bicycle Dynamos (20)
Electrical Characteristics of Bicycle Dynamos
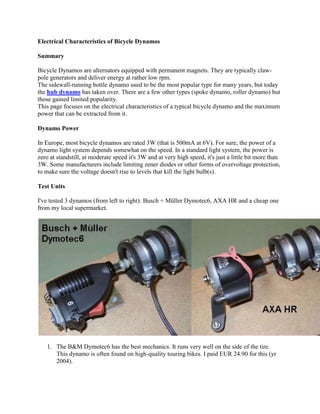
- 1. Electrical Characteristics of Bicycle Dynamos Summary Bicycle Dynamos are alternators equipped with permanent magnets. They are typically claw- pole generators and deliver energy at rather low rpm. The sidewall-running bottle dynamo used to be the most popular type for many years, but today the hub dynamo has taken over. There are a few other types (spoke dynamo, roller dynamo) but those gained limited popularity. This page focuses on the electrical characteristics of a typical bicycle dynamo and the maximum power that can be extracted from it. Dynamo Power In Europe, most bicycle dynamos are rated 3W (that is 500mA at 6V). For sure, the power of a dynamo light system depends somewhat on the speed. In a standard light system, the power is zero at standstill, at moderate speed it's 3W and at very high speed, it's just a little bit more than 3W. Some manufacturers include limiting zener diodes or other forms of overvoltage protection, to make sure the voltage doesn't rise to levels that kill the light bulb(s). Test Units I've tested 3 dynamos (from left to right): Busch + Müller Dymotec6, AXA HR and a cheap one from my local supermarket. 1. The B&M Dymotec6 has the best mechanics. It runs very well on the side of the tire. This dynamo is often found on high-quality touring bikes. I paid EUR 24.90 for this (yr 2004).
- 2. 2. The AXA HR has the strongest magnets, it delivers the highest current. It contains 2 zener diodes (BZX 85C 7V5) in series, to limit the output voltage. I had to open the glued plastic enclosure in order to remove these diodes for the measurements. This dynamo is often found on branded bikes. I paid EUR 16.99 for the AXA HR. 3. The cheapy from the local supermarket has a magnetic performance slightly inferiour to the Dymotec6. The mechanics are not designed for heavy use but it received all required approvals. It's held together by two screws and can be completely disassembled. This dynamo is usually stock on supermarket bikes. Riders who rarely ride in the dark may like this unit at a bargain price of just EUR 3.45 Tools For measuring the electrical characteristics of bicycle dynamos, I've created this instrument. It measures the speed of a bike based on the rpm of the dynamo: This equiment is built from a Panasonic flashlight and a Trelock FC 404 bicycle computer. It includes additional circuitry (see below) to slice the AC voltage from the dynamo and divide it to a lower frequency that the bicycle computer can handle. Initially, I designed this with a cheap no-name bicycle computer. I soon found that this does some terrible rounding at higher speeds. I switched to a branded item, the Trelock FC 404. It displays the decimals of the speed and it does so correctly. To properly set the wheel circumference in the bicycle computer, it's necessary to know the diameter of the dynamo wheel as well as the number of magnet poles. Most sidewall dynamos have 8 poles - you can feel 8 steps per rotation of the wheel (and measure 4 full sine waves per rotation). Refer to the formula below.
- 3. Other tools used for the measurements below are multimeters, oscilloscope, a lab power supply and an adjustable current sink based on the LM317T linear regulator IC. Measurements Maximum Power of different Dynamos Setup: Dynamo, voltage doubler (Greinacher type using 2x 1N5818 & 2x 1000uF), current sink (variable from 100 to 250 mA). Speedmeter connected to dynamo. Procedure: Run the dynamo at 15 km/h. Measure the voltage across the current sink for currents 100, 130, 160, 190, 220, 250 mA. Repeat at 40 km/h. Do this for each of the 3 dynamos. Calculate power from voltage and current. Plot power vs load current.
- 4. Observation: AXA HR delivers maximum power at 200 mA load current (note this is after voltage doubling !), B&M Dymotec6 at 180 mA, the cheapy at 160 mA. The absolute power levels show the AXA HR on top and the cheapy on the bottom at any speed. Conclusion: The maximum power is achieved at a specific load current. This depends little on the speed, but mostly on the dynamo. In other words: A dynamo is a current source. Power vs Speed of Dymotec6 I chose to do this measurement with the Busch & Müller Dymotec6. The nature of the curve is similar for other dynamos, only they would meet a slightly higher or lower power. Setup: Dymotec6, voltage doubler (Greinacher type using 2x 1N5818 & 2x 1000uF), 180 mA current sink. Speedmeter connected to dynamo. Procedure: Run the dynamo at 4, 5, 7, 9, 12, 15, 19, 24, 31, 40, 50 km/h and measure the voltage across the current sink. Plot for each speed the calculated power = measured voltage * 180 mA current.
- 5. Conclusion: With perfect matching of the load, Dymotec6 delivers 2.7 W at moderate speed, 5 W at high speed and 6 W at really high speed. This is what can be achieved without modification to the dynamo. Question: Why does a standard 3 W light system with the Dymotec6 not burn out the bulbs at 50 km/h ? This is because at such high speed, the matching of the load is off (current is too high) so that it can't drain maximum power. Question: Where goes the lost energy when the load doesn't drain the maximum possible power ? It's not lost. The dynamo spins with less effort. Try and short-circuit the dynamo at full speed, the current of the driving motor will drop a lot. Temperature Performance of Dymotec6 As the dynamo runs for extended periods of time, its temperature increases. This test runs the B+M Dymotec6 at 50 km/h and 23ºC ambient temperature. The Greinacher doubler circuit (2x 1N5818 & 2x 1000uF) and a 180 mA load is connected. The power into the load is being monitored. The experiment is stationary on the workbensch, so there's no draught to cool the dynamo. After around 20 minutes, the dynamo output power has decreased from an inital 100% to 80%. For another 10 minutes, it doesn't drop any further. The temperature on the casing of the
- 6. dynamo measures 89ºC at the end of these 30 minutes. It's considerably hotter inside. Continuing this experiment, a standard 80mm computer fan is mounted to provide some cooling as it would be on a moving bike. The power increases and eventually stabilizes at 89% of the start value. The temperature stabilizes at around 40ºC. The Dymotec6 was chosen for this experiment as it has the best mechanical design of all tested dynamos. It doesn't suffer any noticable deterioration after running at 50 km/h and delivering well above 5 W for 2 hours. A lot of dynamos don't withstand this. Bearings and their lubrication suffer from the high internal temperature, resulting in rapid wear. Once the rotating magnet comes into contact with the stator, friction and internal temperature dramatically increase, the dynamo body melts and eventually the rotor jams. In my setup, this just tears the coupling between motor and dynamo while on a real bike, the dynamo wheel may pop off so that the rotor shaft causes damage to tire, rim or spokes. Bottom line: Avoid using a cheap dynamo to assist the brakes on long descents. Horsepower Design Equations and Formulas Calculator Automobile - Car - Truck Solving for torque.
- 7. This calculation corrects horsepower for normally aspirated internal combustion engine to a standard humidity, pressure and temperature after mesaured on a dynamometer. Voltage- E=pi*z*N*P/60*A here pi=magnetic field density/area of magnetic field z=no of conductors N=speed in rpm A=no of parallel path(=2 for wave &=P for lap windings) P=no of poles Power- P=tau*2*Pi*omega where tau=torque and omega=rotational speed rads^-1 In case of dynamos ,the output is generally in terms of power.If you calculate output power then you can know the energy by multiplying it with time. Calculation of power: In ideal conditions i.e no losses, Output electrical energy=Input mechanical energy.But we must consider the losses that occur in a dynamo(or generator).The losses that occur are iron or core losses and copper losses.Iron losses are of two types 1)Hysteresis losses(in watts)=khBfv 2)Eddy current losses(in watts)=keB2f2t2 kh=hysteresis constant ke=eddy current constant
- 8. B=magnetic flux density f=frequency t=thickness v=volume Copper losses:Ise2R+Ish2R(Series field copper losses+shunt field copper losses) Apart from these losses there are armature losses and mechanical losses. Armature losses:Ia2R Basically we calculate output power by subtracting the losses from the input power. Input power=output power+losses => Output power=input power-losses =>Output power=input power - Ia2Ra - Ise2R - Ish2R - mechanical losses-other losses But for converting mechanical to electrical energy without using field winding,then the equation will be: Output power=input power - Ia2Ra - mechanical losses - other losses Calculate the output power and multiply it with time(considering power independent of time) to get the energy produced. Ia can be calculated from the following equation E=IaRa + VL + BCD (BCD=brush contact drop negligible) VL=load voltage Ra=armature resistance E=emf produced=oNZP/60A o = flux due to rotation N=speed in r.p.m Z=number of armature conductors P=number of poles A=number of parallel paths
- 9. Solving for force How to calculate how much watts and voltage a crude dynamo will generate? I want to calculate amount of electricity generated by an AC dynamo, given the width and length or copper wire used as coil and size and power of the magnet. AC is generated by generators, not dynamos; a dynamo is a DC generator. Second problem: it depends on the speed of rotation of the rotor, among other things. Now to some basic physics: a standard commercial AC generator consists of a rotor, carrying a constant magnetic field; the field may arise from permanent magnets or from an electromagnet, powered by a separate DC generator (called an exciter). The fixed part of the machine has copper windings, in which voltage is induced by the turning of the rotor. The voltage is proportional to the speed of rotation, the strength of the magnetic field, the number of turns of wire, and the area of the loops through which the magnetic field passes. The available current depends on the size of the wire, but is also limited by the torque available to turn the rotor. Some typical values: the magnetic field of the rotor is usually on the order of 0.3 Tesla or so. For AC use for commercial power generation, 3600 rpm is the usual speed. For 20 amperes out, 12 gauge wire can be used if you have forced-air cooling. Typical output voltages for commercial use range from 4160 to 13,200 or more. The fundamental relationship: a one-turn coil of one square meter, through which passes a magnetic field changing at the rate of one Tesla per second, will show an open- circuit voltage of one volt. Handy Formula to calculate the output of any generator at any given RPM……. First off 3 thing must be known… RPM, Open voltage at that RPM and the Ohm's of the stator coil. 1. Measure the RPM 2. Measure the Open voltage at that RPM
- 10. 3. Measure the Ohm's of the stator coil. Measured RPM / Open volts = RPM per volt To find a Desired output the formula is: Volts + ( Amps * Ohms ) = Open Voltage ( necessary to achieve this output ) Open voltage * RPM per volt = RPM needed to achieve desired output Example: Alternator spinning at 1500 RPM delivers an open voltage of 34.8 volts so…. 1500 / 34.8 = 43.1 RPM per volt The stator coil reading is .6 ohm Lets say we would like 14.6 volts at 10 amps from our unit 14.6 volts + ( 10 amps * .6 ohm ) =20.6 open voltage 20.6 * 43 rpm per volt = 885.8 RPM If you would like to know an output at a certain RPM you simply change the formula to: RPM / RPM per volt =Open Voltage (OpenVoltage-desiredvoltage) /ohms = Amps Example: 885 RPM at 14.6 volts 885 / 43 = 20.58 ( 20.58 - 14.6 ) / .6 = 9.97 amps And there you have it… since, for the most part, the voltage and rpm are a constant its easy to calculate the output of any unit Dynamo
- 11. Main article: Dynamo Dynamos are no longer used for power generation due to the size and complexity of the commutator needed for high power applications. This large belt-driven high-current dynamo produced 310 amperes at 7 volts, or 2,170 watts, when spinning at 1400 RPM. Dynamo Electric Machine [End View, Partly Section] (U.S. Patent 284,110) The dynamo was the first electrical generator capable of delivering power for industry. The dynamo uses electromagnetic induction to convert mechanical rotation into direct current through the use of a commutator. The first dynamo was built by Hippolyte Pixii in 1832. Through a series of accidental discoveries, the dynamo became the source of many later inventions, including the DC electric motor, the AC alternator, the AC synchronous motor, and the rotary converter. A dynamo machine consists of a stationary structure, which provides a constant magnetic field, and a set of rotating windings which turn within that field. On small machines the constant magnetic field may be provided by one or more permanent magnets; larger machines have the constant magnetic field provided by one or more electromagnets, which are usually called field coils.
- 12. Large power generation dynamos are now rarely seen due to the now nearly universal use of alternating current for power distribution and solid state electronic AC to DC power conversion. But before the principles of AC were discovered, very large direct-current dynamos were the only means of power generation and distribution. Now power generation dynamos are mostly a curiosity. [edit] Alternator Without a commutator, a dynamo becomes an alternator, which is a synchronous singly fed generator. Alternators produce alternating current with a frequency that is based on the rotational speed of the rotor and the number of magnetic poles. Automotive alternators produce a varying frequency that changes with engine speed, which is then converted by a rectifier to DC. By comparison, alternators used to feed an electric power grid are generally operated at a speed very close to a specific frequency, for the benefit of AC devices that regulate their speed and performance based on grid frequency. Some devices such as incandescent lamps and ballast-operated fluorescent lamps do not require a constant frequency, but synchronous motors such as in electric wall clocks do require a constant grid frequency. When attached to a larger electric grid with other alternators, an alternator will dynamically interact with the frequency already present on the grid, and operate at a speed that matches the grid frequency. If no driving power is applied, the alternator will continue to spin at a constant speed anyway, driven as a synchronous motor by the grid frequency. It is usually necessary for an alternator to be accelerated up to the correct speed and phase alignment before connecting to the grid, as any mismatch in frequency will cause the alternator to act as a synchronous motor, and suddenly leap to the correct phase alignment as it absorbs a large inrush current from the grid, which may damage the rotor and other equipment. Typical alternators use a rotating field winding excited with direct current, and a stationary (stator) winding that produces alternating current. Since the rotor field only requires a tiny fraction of the power generated by the machine, the brushes for the field contact can be relatively small. In the case of a brushless exciter, no brushes are used at all and the rotor shaft carries rectifiers to excite the main field winding. Vehicle-mounted generators Early motor vehicles until about the 1960s tended to use DC generators with electromechanical regulators. These have now been replaced by alternators with built-in rectifier circuits, which are less costly and lighter for equivalent output. Moreover, the power output of a DC generator is proportional to rotational speed, whereas the power output of an alternator is independent of rotational speed. As a result, the charging output of an alternator at engine idle speed can be much greater than that of a DC generator. Automotive alternators power the electrical systems on the vehicle and recharge the battery after starting. Rated output will typically be in the range 50- 100 A at 12 V, depending on the designed electrical load within the vehicle. Some cars now have electrically powered steering assistance and air conditioning, which places a high load on the electrical system. Large commercial vehicles are more likely to use 24 V to give sufficient power
- 13. at the starter motor to turn over a large diesel engine. Vehicle alternators do not use permanent magnets and are typically only 50-60% efficient over a wide speed range.[4] Motorcycle alternators often use permanent magnet stators made with rare earth magnets, since they can be made smaller and lighter than other types. See also hybrid vehicle. A magneto, like a dynamo, uses permanent magnets but generates alternating current like an alternator. Because of the limited field strength of permanent magnets, magnetos are not used for high-power production applications, but are very reliable. This reliability is part of why they are used in aviation piston engines. Some of the smallest generators commonly found power bicycle lights. Called a bottle dynamo these tend to be 0.5 ampere, permanent-magnet alternators supplying 3-6 W at 6 V or 12 V. Being powered by the rider, efficiency is at a premium, so these may incorporate rare-earth magnets and are designed and manufactured with great precision. Nevertheless, the maximum efficiency is only around 80% for the best of these generators—60% is more typical—due in part to the rolling friction at the tire–generator interface from poor alignment, the small size of the generator, bearing losses and cheap design. The use of permanent magnets means that efficiency falls even further at high speeds because the magnetic field strength cannot be controlled in any way. Hub dynamos remedy many of these flaws since they are internal to the bicycle hub and do not require an interface between the generator and tire. Until recently, these generators have been expensive and hard to find. Major bicycle component manufacturers like Shimano and SRAM have only just[when?] entered this market. However, significant gains can be expected in future as cycling becomes more mainstream transportation and LED technology allows brighter lighting at the reduced current these generators are capable of providing. Sailing yachts may use a water or wind powered generator to trickle-charge the batteries. A small propeller, wind turbine or impeller is connected to a low-power alternator and rectifier to supply currents of up to 12 A at typical cruising speeds. Still smaller generators are used in micropower applications. [edit] Engine-generator Main article: Engine-generator The Caterpillar 3512C Genset is an example of the engine-generator package. This unit produces 1225 kilowatts of electric power.
- 14. An engine-generator is the combination of an electrical generator and an engine (prime mover) mounted together to form a single piece of self-contained equipment. The engines used are usually piston engines, but gas turbines can also be used. And there are even hybrid diesel-gas units, called dual-fuel units. Many different versions of engine-generators are available - ranging from very small portable petrol powered sets to large turbine installations. The primary advantage of engine-generators is the ability to independently supply electricity, allowing the units to serve as backup power solutions.[5] State the laws of electromagnetic induction. Ans. Laws of electromagnetic induction: (i) A current carrying conductor placed in a magnetic field experiences a force. (ii) The amount of e.m.f. produced is directly proportional to rate of change of flux. Explain the principle and working of a D.C. generator? Ans. D.C. generator converts mechanical energy to electrical energy. It works on principle of electromagnetic induction. Whenever a current carrying conductor is placed in a magnetic field it experiences a force. In D.C. generator e.m.f. is induced dynamically i.e. flux linkage with the conductor change due to movment of conductor. The vvorking of a single coil simple D.C. generator is explained below: A simple D.C. generator consists of a magnetic field set up by permanent magnet and a conductor is placed in this field. The conductor is made to move in the magnetic field so that it cuts magnetic lines of force and an e.m.f. is induced . The direction of induced e.m.f. is given by Fleming’s right hand rule.
- 15. The e.m.f. so induced produces a current in coil which is collected through split rings and commulator.