Roboblock system
•
1 j'aime•481 vues

roboblock packages You can also check it in Sales Sharing Site "www.lunchntouch.com" If you want a brochure in your language, send E-mail below E-mail address unquestioningly! (English, Chinese, Japanese, french, Portuguese, Spanish, etc) Import & Export discussion Welcome, too! Thank you for your touch! E-mail address : yun@lunchntouch.com "We can Make happy place for small business! Let's do it!!" = Lunch N Touch =
![P roduct
Ⅲa¡ n
Contro' 'er
M oto r Sensor Prograrn type
Remote
Conto' 'er
s °rtㅏ
wa re
Age Etc
Robob ' ock
K¡ t Ser¡ es
K¡ ds
Bas ¡c K¡ t 1
M ¡dd 'e Leve' K¡ t ○ 2 2IR, 1CDS l T¸ ct l Mic ○ 十10
Prernium K¡t ○ 3 2IR, 2CDS 2Toct l Mic RFID Card TYpe ○ +10
Ant Bot
Puppy Bot
Sea[ Bot
Duck Bot
D¡ no Bot
ㅌ
'ephant Bot
Car Bot
Robob ' ock
ㅌducat¡ on
Ser ¡es
Bas¡ c K¡ t
M ¡dd 'e Leν e' Kit ○ 2 2IR, 1CDS lT¸ ct l Mic ○ +10
Prem ¡um K¡ t ○ 3 2IR, 2CDS 2T¸ ct l Mic RFID Card Type +10
'nterrned
¡ate Leve' ○ 4 2IR, 2CDS 2T¸ ct l Mic RFID Card Type ○
ㅐigh Leν e' K¡ t ○ 4 2IR, 2CDS 2T¸ ct l Mic GU', C— language ○ ○ 十12
K¡ nds of products / 製品ⓩ種類
ㅌduca'¡ on contents for Bas¡ c k¡ t / ⌒
'一
ν:ν 夕≠:ν 卜0敎育內容
・VVf aI ’s ro bot?
・Which kind of robot
do you wa∩ t to make'
・口小
'''
卜¿
'求
I可 τ
,力、?
・左
'九
'옰
口示'・
'
卜⅝I乍 !,
左ι、¿思¸ω力\?
・Making of robot
foll‖ ovving llne li ∩e
by infrared sensor
・赤外線七ν
'- 'ㄷ
衣
⊃τ!풍 E動 芒札
'걺
,‘ ν
'ㄷ
'⊃ ι'τ ι、〈口卞˙
''
卜
Φ製 I乍
http ∶IIrobob ' o ˛k.˛ o nη
・Learning about 卄ㄱe
pri ∩ciple of infrared
・Maki∩ g of robot
''eacting agai∩
st 卄¬e
i ∩frared se ∩sor
・赤外線七ν++ -ω 原
理' ¿˙⊃ι'
τ亨λ卜˙
・赤外線七ν
'ㅓ
ξ求
Z3動 作口水'ν 卜ω製作
・Pri∩ ciple of ㅇp一
야alion of robot b'y
remote一 contro l ler
・Lear∩ i∩ g about llne
pri∩ ciple ㅇf s∝∨o
m otor
. I, 폰∃ν겯
=用
ι˙
'τ ㅁ小˙
'' 卜ω動I/F原
ㅜ
里Z군 亨,ζ
'. ++— 小
'폰 ㅡ夕—(ID原
理Z= 莩示
・Hovv robot ''uns
・How does robot
get llㄱ e force?
・ㅁ小'・
''
卜'¼ ¿˙5動 〈左
乙¸力'?
・口小'・
'
卜
'¼
ll ω衣51ㄷ
力 "=得
'◇
ⓕ力、?
・How is n otor
dri∨ en?
. 1NInat is 卄ㄱe me一
ch,::::::::::IInical principle
by ll e Ma卄 ㄱ?
・폰—夕—ω馹動方法
'求
¿5 戎도Z多 0⊃ 力\?
・效亨 '¿ 求孑¸棧卞成均갸도
原理
'¼
E5 茫安ω力'?
・Learning about
the se nso ''s
・Making of robot
with se∩ so'' and
m oto ''
・t= ν
'-
ω種類
'ㄷ
'⊃
ι\τ莩.ξ
・七ν
'-、
폰—夕—
在禾I」
用ι左ㅁㅆ・
'
卜
ⓕ 製
‘
乍
・Learni ∩g about
η10∨eη1e∩I of robot
by touc汁 ㄱs이ㄱsor
・WIㄱ at ¡s 卄ㄱe reac—
tion of ⑽bot againsl
touch se ∩sor?
・夕・ν尹七ν
'- 'ㄷ
求Zb
ㅁ小
'''
卜ω動I乍 Z=莩
‘
(
・夕,'于 l-ν
'-'ㄷ
ㅗ
Z5 ㅁ水'ν 卜ⓕ反∫芯
'¼
¿˙¸
τ도ⓕ力'?
・Lear∩ ing about "ㄱ e
pri∩ ciple of sound
recog ∩ition senso r
・Making of robot
reacling agai ∩st 卄ㄱe
sound recognilion
・音ω認識七ν
' -ⓕ原理
'ㄷ
⊃ι、τ亨.'
・音七ν
'- 'ㄷ
衣Z6動
‘
乍ㅁ示˙・
'
卜ⓕ製作
・Mak¡ ∩g of robot
''ecognizing
卄ㄱe
stadiuㄸ
', a∩
d push一
i ∩g 卄ㄱe oppo∩ent
o∪ t ㅇf stadiur˙n
・赤外線t ν
'-Z*禾
I」
用ιτ競]支 場⅝確認ι、
相手ㅁ示˙・ν卜¼랴甲ι出寸
口水'' 卜Φ製
'乍
・Making ㅇf ''obot
wa‖<i∩ g w¡ lh 4 legs
b'y two ∏)otors and
・二˙⊃ⓕ폰ㅡ夕ㅡ¿七
ν寸—左禾I」
用ιτ, 4足
‘
步ι'τ ι' 〈口示˙・ν卜
ⓕ製 I乍
・Maki∩ g of rol⊃ ot
wa‖<i∩ g vvill● 6 legs
・6本 ω月却左持⊃τ步ι'
τ口卞'ν
卜ω製I乍
Learning about llne
・Maki∩ g of ''obol
c이ㄱtroIIed by
remote —co ∩l ro I Ie ''
. I’ 폰∃νθ⊃原理Z=
莩芯˙
. I’ 폰∃ν
'ㄷ
〈」::⊃ τ制1± Π
古札
"多
口小˙,'
卜ⓕ製1乍
・Makir'g of ''obot
mㅇ ∨i∩ g agai∩ st ‖ㄱe
daps b、 y sou∩ d
recog ∩ilion se ∩sor
・音七ν
'
—충禾I」
用ι
左拍手 1,音 Zf認言哉ιτ
動〈ㅁ卞˙'' 卜ω製
‘
乍
1
1
1
1
1
1
1
1](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommandé
Contenu connexe
Plus de lunchNtouch
Plus de lunchNtouch (20)
Dernier
Dernier (20)
Roboblock system
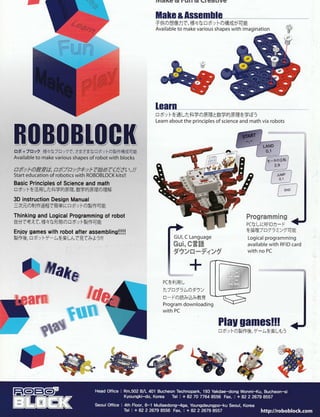
- 1. 鹵蜃舒輟繼 歡 彎 萱 畺 — 馨鹵鐵鹽 闊 闊 鹽彎 饌 篁驪薰 彎 ⅢΠㄸe & Πsse■●●L】 B 子供ω想像力7● , 樣朶⅛口ㅆν卜ω構成δ可能 Ava¡ lable to make va rious shapes 'Λ I¡ th ¡nη ag¡ nation ㄴear●● 口Δ믓ν卜左通ι左科苧ω原理¿效苧的原理찬苧 IF¸ Learn about the princ¡ ples of scien⊂ e and math via robots 蔓夢夢별萱晝彗홧重晝覇튤틸彙畺흖휼彙兮힝틈 P⊂ 左ι'ㄷ RHD力 —卜 ' 또EEE:BL●-Eㄸ 口求 + ’ ㅁ’ '夕 樣˜右 ’ 口,夕 ‘ , 古褒芒'衷 ⅞口示''' 卜Φ製作構咸可能 Ava "able to n)ake var¡o'」 s sh。 pes of robot vvith blocks 壺夢¿異’:夕 얗皐¼雙奉塤翼.鐄 굔:을 簧: 낯Ξ夏¿좋〕菱:宜흘툭才≤菱옳옳Ξㅑ’昇乭푹 ˙ 毫婁塤夢볼쭈暈::촐 ˙툐쑹呈宅˜¿ 'i:滸 Start educat'on of roboti⊂ s vv¡ th ROBOBLOCI〈 kits!! Bas¡ c Pr¡ nc¡ ples of Sc¡ ence and math ㅁ本'' 卜Z' ’ 舌用ι左科亨的原理, 數莩的原理ω理解 3D ¡nstruction Des¡ gn Manual 三次元ω制作過程τ簡車'ㄷ 口示''ν 卜ω製作可能 Th¡ nking and Logical Program'n¡ ng of robot 自分τ考λτ, 樣˜⅞形態ω口ㅆ'' 卜製作可能 Enjoy games with robot after assembling!!!! 製作後, 口示 'ν 卜 ’ 'ㅡ ÅZ⅜ 癸ι九τ見τ∂ ’ 求⊃!!! 婚翰枕趣罷 泓驍闊翰: GUI, ⊂ Language 윕廈활曦휼붐菴彦茴蔓蚩篁 惑닭亐委율"ξ 藍暉幸芭乳誓ζ,√ 쉘貨˙ ZΞ 論理 '˙ 口 ’ ∋三ν,可能 Logical prog ''a nㄱ nㄱ ing ava"aUe w¡ th RFID card vvith no P⊂ P⊂ 啓利用ι 左 '√ 口多 쭈 ,Å ω삿τ ’ ν 口ㅡ卜 'ω 詵*迅*敎育 Program down load ¡ng vv¡ th P⊂ PIaΠ gar‖ e덟꼬 口ㅆ'' 卜ω製作後, ’ '-ΔZ=癸 ι七⊃ ㅐead Off:ce : Rm.5o2 BIL 4o1 Bucheon Tbchnopark, 193 Yakdae—dong ™onm¡ -Ku, Bucheon—s¡ Kyoungk¡ -do, Ko”ea T히 : + 82 7° 7764 8556 F¸ x. : + 82 2 2679 8557 Seou' Offioe : 4th F'oor, 8-1 Mu''aedong-4ga, Youngdeungpo-ku Seou', Korea T칡 : + 82 2 2679 B556 Fax- : + ε2 2 2679 8557 'http:IIroboblo˛ .˛ om:
- 2. P roduct Ⅲa¡ n Contro' 'er M oto r Sensor Prograrn type Remote Conto' 'er s °rtㅏ wa re Age Etc Robob ' ock K¡ t Ser¡ es K¡ ds Bas ¡c K¡ t 1 M ¡dd 'e Leve' K¡ t ○ 2 2IR, 1CDS l T¸ ct l Mic ○ 十10 Prernium K¡t ○ 3 2IR, 2CDS 2Toct l Mic RFID Card TYpe ○ +10 Ant Bot Puppy Bot Sea[ Bot Duck Bot D¡ no Bot ㅌ 'ephant Bot Car Bot Robob ' ock ㅌducat¡ on Ser ¡es Bas¡ c K¡ t M ¡dd 'e Leν e' Kit ○ 2 2IR, 1CDS lT¸ ct l Mic ○ +10 Prem ¡um K¡ t ○ 3 2IR, 2CDS 2T¸ ct l Mic RFID Card Type +10 'nterrned ¡ate Leve' ○ 4 2IR, 2CDS 2T¸ ct l Mic RFID Card Type ○ ㅐigh Leν e' K¡ t ○ 4 2IR, 2CDS 2T¸ ct l Mic GU', C— language ○ ○ 十12 K¡ nds of products / 製品ⓩ種類 ㅌduca'¡ on contents for Bas¡ c k¡ t / ⌒ '一 ν:ν 夕≠:ν 卜0敎育內容 ・VVf aI ’s ro bot? ・Which kind of robot do you wa∩ t to make' ・口小 ''' 卜¿ '求 I可 τ ,力、? ・左 '九 '옰 口示'・ ' 卜⅝I乍 !, 左ι、¿思¸ω力\? ・Making of robot foll‖ ovving llne li ∩e by infrared sensor ・赤外線七ν '- 'ㄷ 衣 ⊃τ!풍 E動 芒札 '걺 ,‘ ν 'ㄷ '⊃ ι'τ ι、〈口卞˙ '' 卜 Φ製 I乍 http ∶IIrobob ' o ˛k.˛ o nη ・Learning about 卄ㄱe pri ∩ciple of infrared ・Maki∩ g of robot ''eacting agai∩ st 卄¬e i ∩frared se ∩sor ・赤外線七ν++ -ω 原 理' ¿˙⊃ι' τ亨λ卜˙ ・赤外線七ν 'ㅓ ξ求 Z3動 作口水'ν 卜ω製作 ・Pri∩ ciple of ㅇp一 야alion of robot b'y remote一 contro l ler ・Lear∩ i∩ g about llne pri∩ ciple ㅇf s∝∨o m otor . I, 폰∃ν겯 =用 ι˙ 'τ ㅁ小˙ '' 卜ω動I/F原 ㅜ 里Z군 亨,ζ '. ++— 小 '폰 ㅡ夕—(ID原 理Z= 莩示 ・Hovv robot ''uns ・How does robot get llㄱ e force? ・ㅁ小'・ '' 卜'¼ ¿˙5動 〈左 乙¸力'? ・口小'・ ' 卜 '¼ ll ω衣51ㄷ 力 "=得 '◇ ⓕ力、? ・How is n otor dri∨ en? . 1NInat is 卄ㄱe me一 ch,::::::::::IInical principle by ll e Ma卄 ㄱ? ・폰—夕—ω馹動方法 '求 ¿5 戎도Z多 0⊃ 力\? ・效亨 '¿ 求孑¸棧卞成均갸도 原理 '¼ E5 茫安ω力'? ・Learning about the se nso ''s ・Making of robot with se∩ so'' and m oto '' ・t= ν '- ω種類 'ㄷ '⊃ ι\τ莩.ξ ・七ν '-、 폰—夕— 在禾I」 用ι左ㅁㅆ・ ' 卜 ⓕ 製 ‘ 乍 ・Learni ∩g about η10∨eη1e∩I of robot by touc汁 ㄱs이ㄱsor ・WIㄱ at ¡s 卄ㄱe reac— tion of ⑽bot againsl touch se ∩sor? ・夕・ν尹七ν '- 'ㄷ 求Zb ㅁ小 ''' 卜ω動I乍 Z=莩 ‘ ( ・夕,'于 l-ν '-'ㄷ ㅗ Z5 ㅁ水'ν 卜ⓕ反∫芯 '¼ ¿˙¸ τ도ⓕ力'? ・Lear∩ ing about "ㄱ e pri∩ ciple of sound recog ∩ition senso r ・Making of robot reacling agai ∩st 卄ㄱe sound recognilion ・音ω認識七ν ' -ⓕ原理 'ㄷ ⊃ι、τ亨.' ・音七ν '- 'ㄷ 衣Z6動 ‘ 乍ㅁ示˙・ ' 卜ⓕ製作 ・Mak¡ ∩g of robot ''ecognizing 卄ㄱe stadiuㄸ ', a∩ d push一 i ∩g 卄ㄱe oppo∩ent o∪ t ㅇf stadiur˙n ・赤外線t ν '-Z*禾 I」 用ιτ競]支 場⅝確認ι、 相手ㅁ示˙・ν卜¼랴甲ι出寸 口水'' 卜Φ製 '乍 ・Making ㅇf ''obot wa‖<i∩ g w¡ lh 4 legs b'y two ∏)otors and ・二˙⊃ⓕ폰ㅡ夕ㅡ¿七 ν寸—左禾I」 用ιτ, 4足 ‘ 步ι'τ ι' 〈口示˙・ν卜 ⓕ製 I乍 ・Maki∩ g of rol⊃ ot wa‖<i∩ g vvill● 6 legs ・6本 ω月却左持⊃τ步ι' τ口卞'ν 卜ω製I乍 Learning about llne ・Maki∩ g of ''obol c이ㄱtroIIed by remote —co ∩l ro I Ie '' . I’ 폰∃νθ⊃原理Z= 莩芯˙ . I’ 폰∃ν 'ㄷ 〈」::⊃ τ制1± Π 古札 "多 口小˙,' 卜ⓕ製1乍 ・Makir'g of ''obot mㅇ ∨i∩ g agai∩ st ‖ㄱe daps b、 y sou∩ d recog ∩ilion se ∩sor ・音七ν ' —충禾I」 用ι 左拍手 1,音 Zf認言哉ιτ 動〈ㅁ卞˙'' 卜ω製 ‘ 乍 1 1 1 1 1 1 1 1
- 3. RoBㅇ '" 目Π∃EΞK≤ Robob'ock PreΠ 1 ¡u ∏1 K¡ t 口Descri ption This is for the mid예 e cou''se of education that user can assemble ten or more kinds of intelligent robots by cㅇ nnecting each block freely This would also be good tㅇ students who already rㄲ ight be e× perienced with the ROBOBLOCI〈 basic kit or eginθ ers. User can program with robot control device only without computer, and therefore, this wㅇ 머d be the best kit to teach the princip좨 of program ■Aν a¡ iable r'obot shapes —Programmable 2-legged robots —Progranㄱ mable quadruped robots —Programmable quadruped insect robots —Programmable 2-w・ heeled ''obots —Programmable 4-w・ heeled robots —Other ''obots —Various kinds of battle robots(Battle game available) —Rern ote— contro l aν ˙ailabl e :::::: 酎 Π Features —Robot control device provided —Various kinds of sensor module (lnfrared, Touch— sensor, LED) provided) —Various plate blocks —Various square blocks —Various elbow・ blocks —Motor box to change gear ratio —Variously shaped w・ heels provided —AA BatteⅣ (to be sold sep!arately) —Robot— assemUing instructions pro∨ ided ::: 彙毫蚩毫蓄蓄蔓爻菴흼휼Φ蔓蚩:윕 들薨힝:윕훑毫董윕:重 뢸畺鎣覆馨
- 4. Cornmon Components ㅌl bow bIocks #''''麟 瞼 ㅑ ㅑ ㅑ ㅑ 蛔 輜 η荒,、 ''鷺 翫ρ—蛭 :: 凶 : :頀㎴㎥涍 '''''뼙 ●●錢 .、 、、暉 휼Ξ凸●●兆、 、 魯 ....鶴 灐籬확¾υ =宅 딜龜鋒: : 哲円 ‘ ξ-¼ η ‘ ⅝寧:: 纘秊 — :r"¾ ㅓ鷸麾=: 撈●●●●麾 Case fo'' 2 moto''s Related to n¨ 'oto''s 譎..● ●麟 : Ξ凸●●●●蟲 ,' Whee l s 遡 ● ● ● 0 麾 ㄴ
- 5. 南 ■ . ● ■ B . 땁 ・ . Bushings 응 ' ・ ' ● ....勢 φ ....晞 離 ● ● ● ● φ ˚ ● ● ● ● 麾 PIate bIocks θ ● ● ● ● 申 e● : ●●擧 φ o...輕 P!ate blocks σ√荒>>> 鎚뼉壎㎡∵√驍β '""'d盞 鰥∂υυ∂幣
- 6. L¡ neBot(ㄴ og ¡c Kit) ■Descri ption Th¡ s robotfollows the black line on the white background.The princip'e is thatthe robot perce¡ νes the difference ofinfrared rays reㅓ ecting from white and Uack cdor s¡ nce the white and Uack cdor''eㅓ ect the different amount of¡ nfrared rays respect¡ v・ 이y.시so the shape ofrobot can be asseηㄱ미ed fre이 y by users w¡ th the prov¡ ded diverse components,and users can eas‖ y study the princ¡ p섧 0f robot operat¡ on wh‖ e assemUing ㄴ 一 ㅡ ㅡ ㅡ ㅡ ㅡ 二一 一 二 二
- 7. Roboblock Basic K¡t z-˚°˚˚합・d iㅁ esau‘ Fr●˚ Ko˚ '⅛ ■Description This can be used for the basic course of education that the user can asser˙ nUe ten ㅇ '' more kinds of robots by using plastic blocks prov・ ided, and th¡ s can also be used to dev이 op child s intel lectu섧 powe r ■Ava¡ ]able robot shapes —2-legged robots —Quadruped robots —He× apod robots —2-wheeled vehicl e —4-wheeled v˙ ehicl e —Other shapes of robots that can be made with blocks ㅜUrt熔 H≡xa°od::碎 seet :=le:● h●● ' ■ Features —Various plate blocks —Various square blocks —Various el bow blocks —Motor bo× to change gea'' ''atio —Various kinds of wheeIs —AA battery —Robot— r1ㄱ aking instruction nㄱ anu섧 LI:''o:' Y¸ⅱk 牛leg°≡화표m碎● :ur :ㅐ埋Iηopte‘ S죤al Λ ⅛≠
- 8. Robob'ock K¡ ds 「rog 흥utter FI포 M'ㄸRo瞰 P'agonfν Descri ption This can be used for the basic co∪ rse of education, and user can asse“ 1Ue ten or rIㄱ ore shapes of ''obots by using plastic blocks provided This can also be used to dev˙ cㅓ op ch ‖d ’s int이 lectu짊 power ■Aν ailab'e robot shapes —Two-legged ''obots —Quadruped animal robots —Hexapod insect robots —Tvv˙ 0-wheeled vehicles —Four— w・ heeled robots —Other shapes of robots that can be nㄱ ade w・ ith blocks Aircraft S:˚al 욕ν●Y● le ■ Featuros —∨'arious plate bIocks —ν'arious square blocks —Various elbow blocks —Various k¡ nds of wheeIs —Assembly manual for variously shaped robots —Ten or more bIock r1ㄱ ode's prov・ ided —Rivets tㅇ joint Uocks conv˙ enienⅡ y Cκ¸d¸ Stagfeetle Sca rab T● 'tle La° 'β ug
- 9. :::: i× '. ::::: :: :: ::・ ::. ::: :: ::: :::::: : :::: :::: 盡璧Fφ Y ;':,i¾ 賭˙흉쓩:I::'遂 瑀¾⅝ . CPU : ATmeag128-1 6Mhz ・p''ograrn downloader— ISP cable . Progran1 : AVRGCC, CodeVision . Servo Motor : 16 EA , head l EA . A'uminum Frarne Type Robot . Ren10conl Control (PS2 ControI Ier) . Serν o Motor : 16EA, head l EA(optional) . C— Source Program ;÷ ●:-::::::-:ㅡ ]:-=-:-::● :::-:::● :=::ㅑ ::一 ::=:≡ ::● :;:官 :::::有 —::˙ ::--::-:::::● '=-::----:● ::=:::::● :÷ ●::::::::;・ =::˙ :=:-::=::::::-::::::::::-:::: T"I:'‘ :'˛ ¨IIIΠ g ηξ˙ ’ '.力 ˛IηzαΠoI‘Iy˛,¸ (,'e放 'y:'˙ 'ι I'ι ι:α Io7':,˙ ,:、 ''IJ'''I''‘ ':'Δ yo¿o∫ ’ ˛・/'oυ υ:)j:'I'‘ ιιoη :lpIt''''oI,o'ρ α˛:κ αge.TI'e,'α ¿I'Hιι '˙ oI— II˛ 'α I',˛・αIt,'''ι 'z,‘ I‘,I"', ει 'Γ n'/,'eI¸˙,ιI‘¨ 'η ˛ “’ 'zo''e:,ι I7,‘ I OΠ ˛˙ 'PΓ /’ g7:‘ ιT)〃 "ℓ ‘ I.A● ’ ‘ I'I‘ ¡ '¿ ItI” ˛’˛,ㅏ ’ ・α',.ι τ:'α tIT,¸ ι,:':'oτ 'ε 'η 'η Io:)'¿ τ〃I‘IIη g)!oτι ''… o¿ o':'’ o''Γ ¸ '˛ ˛oΓ α ‘ αI,'˙ e-‘ (,’ e'"l,I˛ ’ ‘ I ●:-:-'- :-: :一 —::ㅑ : =:: The Key - "Easy to Operate" Huroi Robot, Robot Progr㎝ ^nm'ng Made Easy Use''s of th¡ s e× citing robot package have an opportunity to learn robot techn이 ogy first hand Progranㄱ ming is sirnple w・ ith the supplied AV'R Gcc, 1AR and Codevision software v¡ a the included PC interface cable AVR Gcc is a programming tod based on the C prog''amming language and is prov・ ided for the more advanced users Beginners to robot programr˙ning technㅇ |ogy w・ i ll be pleased to use the suppIied Codevision progranㄱ ming software. VVithㅇ ut knㅇ w・ ing any programming language at a‖ users can create operation섧 subroutines with the dick of a rnouse. Fu‖ Source Code is S∪ pplied ≠{::::-::: .:=-::: - ●::● -:=--— Easy' Programming Technique The siηㄱplest way to prograrn Huroi Robot is w・ith the "catch and play" function Using AVR Gcc or Codevision and Simu'ator(teaching program), just move the ''obot into any pos¡ tion and click the mouse to "capture" that pos¡ tion. Moν˙e the robot into another position and repeat the process. The software then ]inks these "captured" positions and once activated, smootl에 y' trans¡ tions the robot。 ②s movements through these p ''og ''a nl nㄱ ed positions 攀蓋 F畓 昨푭⅛손作菱흉표※떨욥η욜흄숍中볍 Huroi robot can be retrofitted with several accessory rnodules and anciIIary items to custo“ㄱize its function섧 ity. By adding addition쇄 servos and b''ackets, the head and waist can turn and "gripping" hands can be used Gyros, acc이 eration sensors, speech functio1ㄱ s, R/C control accessor¡ es and more can also be added as they become ava¡ lab]e 藜菫 Γ숄蕪휼힌琯숄⅜ —RB—C1 28B Micro controller board for 24 serv˙ os —Sixteen RBD-707MG D¡ gita] Robot servos —Re— chargeable NiMH battery and charger —AVR Gcc programm¡ ng software and manua' —PC Ser¡ al or paraIIel port programn1¡ ng interface cable ㅢ IIustrated User Manual ::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::: ::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
- 10. 盡鍵蓼濠雛灝諱濠驪驍諱毬萱濠蕓姦盡蕓萱兮塵蓬晝選藿璂鍾巍廈蕓 驪 芦<¸ 『巍홍#坤 畓짬堊鏤1 瑟怒 ・cpu —ATnleag128-16Mhz ・p¨ogram downIoader— ISP cable . Program : AVRGCC, CodeV¡ s¡ on . Servo Motor : 16 EA , head lEA . 미ast¡ c frame Type Robot . Remocom Control (PS2 ControIIer) . Servo Motor : 16EA, head l EA(opt¡ onal) 츌擴焄:::I — : ●.:: ˙:-::- - - ::::: .● :-:::● ::--:::::' :::j= -::::= :::: =- = -::: :- ::::: 북::. ˙;˙ :- -˙ :::● — ¨ 力 ',ex‘ I'I7,♂ ηe,,'IzτI〃zα ηoIJ’ ˙oυ oI q〃 ●I'ι ’ ‘ Illt'‘ ι 'oΓ 」,,''fτ ιJ“I∴:,‘ ''7J To¿ o''˛ ・/,o¸¸):'','’ αco7’ 'I’ I''''‘ ,l,OYI,α ˛:I는 αge.T"e¸ ・ 'α l,Ie H'〃˙oI— II˛˙α/I'・ '・ αI〃 .Γ 'I/1,˛ Io.Π ",,cα '˙ ',,./,eeI'’ ,Jαl・ ι:˙ e'lIo'・ eδ ‘ IηΔoΠ ceI,rog'ι τ711I"c’ ‘ I.Aν˙αIIα ¿/e^,˙ oㅏ˛’φ˙ ’ ,α δαA'II,」 ,-o: ˙ o'I εα ''''''φ )˙ /,z'IIJIη ‘ ':''oτ '’ ˙Γo¿ ι ’ ': o'ι ,,eIΛ o'˙ α,α P'˙ ˛’ -α ‘‘ e〃 '¸ I'Δ :麾—
- 11. 巖饒嬖患盡鑑蟹鎬驢襲蓬樺饒鎬蟠姦巍篁薰姦罷蕓邇盞廈馨盞췰擴 :≡ = -:=:::::-:::::::::=::;:-:=: :::˙ ::::::::::::::● -;:=--=: T/ll':‘ Ilo¿ oIIδ αㅏ ’'’ )’ ¿ι,IIe〃 e/l˛r'potl,˛ ’ αII‘eI:TIIe'/,"ι e DOr ftlegTleα e; ,e'J¿ M,Ieg ι 'e'’ g,’ Pyoν ':‘ Iξ Ξ 〃1ℓ ℓeχI¿ ’ II˚ ’ , ee¿ ι ', eJ 'o ˛να 'π Iη αηy JI, θε 'IoΠ .' T方 e Tㄱol,o' ιι,e', I δRo¿ of Seγ,’ o',Iby '/zℓ IegJ. I½ 'δ χII Iη˛I"Jθ 」, ',’ e'),〃 z':I'g ˙ o˛ι ’ ''θ ΔIo /l lα πξα〃η˛〃oη αI Λr,● o' e"ε ‘ ρ ' 莎α ” "yle, :::i --::- :::: -::: :: ::::: -::::: ::: T Ie j , o莎o''ε αΓ〃z JeI’ νξy, λ.δ ', α˛˙˛ 'ι 7ㅣ αⅱe, αI'J, d/,eα ⅱαl,Iα ’ ?zo νξ,)ze’ ''. 도h' ¨o/,oI"‘ '劤 γℓ ' ¿αδξ'˙ oIα '':o'', ,/zo'tIJeτ eI¿ r)', ‘ ¿ ’ :IJ ’ ,’ ・I',' l)'o〃 o〃, αI'Δ α "ι ηεIIoliα I gγ'η ψe’ ': TI'˛ , j "‘,I',oI'ε αΓ ':,'':‘ α 'z ιtIIZ,"./"¿ Iα ’ ):',ⅱ e〃:I''・ ,'I力 ‘ ι '’ ’ :,'e Ieδ 'e‘ /"r)˛*',oII‘ I ιI':,’ glz〃,α '”’ III Iα:''α yz‘ II‘ 1’ ' E˛ℓ ') ”’ 〃g η 'e"J ωα ’ 'e"¿ I' 仍e '˙ o¿ o' Iδ ’ ηεIτ 'J'J I〃 '力 ' H'. N¿ "'I ・CPU : ATmeag128-16Mhz . Progrann dow˙ nloader- ISP cable . Prog''am : AVRGCC . Codev¡ sion . Servo Motor : 18EA . Type : AIuminm Body frame . Vdtage : DC6V . Zigbee RF ControIIer . ¬Oaching P「 ogram . ISP Cable (Prograrnmi ∩g with C-language) . Wi ''eless CCD Cam (opt¡ on) . Basic Stamp Module (BS2) . Servo contro . Remocom Control (PS2 Contro1'er) . So'vo Motor : 18EA . Controlled by Basic and C-language . Controlled by Basic and C-language . Type : Rastic Body frame . 1nterlace : Seri㎭ comrrmunicatio∩ (pr'ogr'arnming with ROBOBLOCK Basic) . ISP cable (programming with C-language) ・CPU : AT90S2313((A'˘R) . Motor : RBM-606MG PWM pulse se'ν o motor . Mernory : 24LC32 EEPROM(i2c) 4κ bⅥ e . ˘dtage : DC5V (external power) . Type : AIuminm Body ㄲrame . I nterface : Serial Conη municatio∩ (Programnning with ROBOBLOCK Basic) . ISP Cable (P''ogra'ㄲ ming with C-la∩ guage) . CP∪ : AT90S2313((AVR) . Moto'' : RBM-606MG PWM pulse seⅣ o motor . Memorv : 24LC32 EEPROM(i2c) 4Kb /te . Vdtage : DC5V (e× ter∩ a1 power) . TYpe : AIumi∩ m Body frame . Inte㎋ ace : Seri섧 Comrrunicati이 ㄱ(Programming with ROBOBLOCK Basic) . ISP Cable (Programming with C-language) TI¡ ι,j'',I’ ‘ γIι ‘ :〃 '''‘ :I'/I'‘ ●'7¸ I'Δ '.‘ '‘ :(:zι 7tII˛ '.ι ¡ '’ ’ ι¡I'¡ι:/:,‘ '‘ ''‘ II,/ι ’η 'ι ,ν ‘ '’ :''''’ ':I7'ι ’Γo/,o'I¿ 'ι 'Iz''˙ ι ', lι '¸ ‘ ''‘ ,Λι ''''‘ ’ I'',I'‘ ,'II‘I('7:‘ ’II,∠ ’ 'Γ ‘ 〃 '‘ /''’ '’ :、 '〃 '‘ ,''‘ ,'',‘ '''‘ I‘ '''':z('I˛’ 7’ ‘ ¡ 'I∶ '’ ●),ιη::T/I˛・j7‘ '/,,''˛ ι '7I7¡ '’ ¸ ‘ 〃zι ’I,','˙ ‘ ¡∫ ‘ :II,/‘ '',:'','‘ ''''''!II” ‘ ''I'7¡ '''Λ ˛ '、 Λ '‘ I'Iρ ι '/:,oI'‘ /‘I('‘ …Ig'z'IztI''')'II I':,'‘ tlztl/ιΔ ' E' 'I● rlzl77‘ 7'''ι Iξ ’ ιI '‘ , ‘ '' ‘ '',’ 力I' '/z' I‘ '¸ υ ' ’ ' ’ η˛II'ι Iξ'‘ I II’ y力 ' (I' N'・ ''・ I 繹 樺麾 闊 驥 欲 搬 繼 繼 醯 欲 籬 醯 解 麾 麾 鰥 鰥 輳 鰥 雜 噫 壎 醱 穆韆轢 폄芸 署盡戀 壟⅜參 重 羅⅜쭈 鏑 헐 灌 搾 P T/,o α ':'’ ' J'II,’ ℓl ♂〃 'η α˛˛τι, ●I''. ‘ ι ’ '¿ I '‘ I,eι "'¿ Ie '"‘ ,1‘ 'η 'eη '. TIze '1o',o' rc’ α〃tTle‘ Ι,α ‘ e ’ o'α ''oΠ , :,/Iott'ιI'‘ eII,o˙ ’ ':’ ,'・ ''I¸ 'T'zo'I‘ ,,,,αy,Jα 〃 '''ε '’ o'zα I‘ '77l,l,ι ’':E,’ 'I:',’ ・/I'Izg〃 eet∫ '‘ /ⅱo‘¿ ’ ','〃 z¿ ''Y/,e '1o¸ o'':,’ ',˛ :・ I〃 tletl Iη YI'e〃 '.N¿ ● ':II/,ZI'ol力 ιι ':’ ˛˙ι '˙ ,’ e':˘ po” ’''',IIㅑ Yl〃 ‘ Io'・ 'δ p’io♂ ':ι '沕 "'˙ 'I'' :. '1o¸ o' ,ℓ Γ '’ o ˛ ‘ 'η "oIIe7 (˙ AB— I, ι 'j,'7zg ¿αJ’ ˛˙-I‘ 〃 '‘ ' ・CPU : AT90S2313 (AVR) . Motor : 5 PWM pu'se seⅣ ˙o motor . Memoη : 24LC32 EEPROM(12Cway) 4kbⅥ e . Vbltage : DC5V (e×+ernal power)x2 . Size : 좀*+-i '˙ * ・Cㅇ ∩tro‖ ed by Bas¡ c and Cㅢanguage but not PC remote cㅇ ∩t''칡
- 12. TTz˛, E:y〃 ι,:''˛' ΩτIo‘I,'ι {p‘ '‘ I ‘ ¿I¼ υ ’ ' IIIe η:'‘ λ '' ,이,力 I''Iε α 'ℓ ./ ιIΔ s’ g’ ' α,’ αI∴,¿ I' "," . I力 ' I''˙ ι ' ‘ /e‘ '巧 ㏄ι˛f I,ℓ ξJo'’ ' fDOr, Ieg ‘'',Ig', '’ '˛'‘ ¡ '',♂ 'Iz':’ ’ 1o¿ o' ˛˙ι〃:' '・ '’ ιιIπ ‘ I‘Ie 'o ‘':Jξ f˛ ’ ι¿I, ˙ ’ '‘ 7",, α ',Δ ’ ' ι:α ', π '‘ p 'I'' "" 〃zo',Iη g Iη α:,〃 :α ’ 'ψ ' I'''' '':I'ι η ' ''’ αI奸 ''g "'˙ ',’ ‘ 7'Δ T/,'' 7'o¿ o' τι:’ ':, I2 Ro¿ o' δυ1˙ ':o''/',I' I力 ℓI'':‘ E˛ ’αr ・ 〃 ’'η g ''ξ '‘ ''J Λo ‘ I:'','"’ ¿Iι ' '/iι , I,‘ z',Iε '˙o/,o' ˛力αδ 'Iδ Iδ I/,˛ ・IIIJξJ I〃 Ληξλ '˙ ', 力o” ’'1''Γ tl'I'''/,,,α I ˛ 'Ie(˙ Π10η I˛ ¸ι〃 ‘ ' Γ ‘ '‘ I〃 ’ l '‘/ Λo 〃 'ι ιπξ', Iα Γo¿ o' 〃zo˙ ’ ’ ' ㅑ1" 力 'ν e・ 1e ’ ℓeτ '’ 7'J ” α,./, rIγ ˙ ', ¸τ '' ι¼ ’ ηo')''' 力α1’ ' 〃zσ I,'‘,‘ 'Yα T:〃 7'' ’ η ‘ ' (' ˛,’7'plel'ι / ::::- :::::: : ::: :: : : :: : ::::: . CP∪ : ATmeag128- 16Mhz ・Progranㄱ downloader- lSP cable . Program : ^'VRGCC , Codevision . SeⅣ ㅇMotor : 12EA . TYpe : Aluminm Body frame . Vdtage : DC6V ・Zigbee RF Controller . ISP Cable (Programmj ∩g with C・ language) . Wireless CCD Cam (opt¡ on) T"e Ro¿ oI K’ ' ':δ αyo¿ 'ι ,' ε方α,♂ ':δ "r γo〃T RC oy α〃Ioη o,1zo"δ Λo¿o' e ˇpθT,:,1,e/I'α 'Ioη . IB● y l lf〃 z‘〃Ig ♂σ,,'ℓ εoηzηzo/, RC 〃Mcπ ∴ ':"'‘ ιτ,ItI ˛˛,/Iℓ elj '力 e ⅱo¿o' 力α ‘eχεe'Ieη ' Λⅱα˛:":oη. ㅣι¿zπ ’ ηg 〃,e ι∫o〃y ,ηzα II N'1Π I ¿α〃eη pα εti, ‘ γ7'ι I I/ze R/ε 7γzo10y εoη〃oIIeT ',Ieα π√ I力ℓ¨e 'Ξ I˛ ’'ι ηA) "ryoo〃 z Iη,':Je"T αMIHoηαI (‘ 'Ieε 〃o,lI˛ ,. ∏ " /,α νe φHoη αI α(':ε e‘δoTIe‘, i’ 'ν ε力αs α Pι〃I απJ ηI' oy gI';˛ 'P‘ 'Yδ , ㅣΛ ',’ I〃 ηzαην,,zo’ le ’ η〃l‘ 7 ” ’oI'’::¡δ. 燾꾸*干 — =● t좋 뭏*ξ . CPU : ATn˙leag8-8Mhz . Prognam downloader— ISP cable . Program : At/RGCC, Codevision . Servo Motor : 2EA . 4ㅌ A DC motors . Zigbee Wineless ・미ayst삵ion 2 Controller . Wi¨ eless CCD Cam TII‘ ’ 7 ˛,˚ ‘ :,' ‘ I〃 ' ' 'I:I' ''I‘ ,!、 ' ι¡ 'ι ¡I' tIIκ ‘ ’Δ˙ /('!' ‘ ¡I(''I:''¡ ' ι '˙' 'ι I'/tII,ItI '‘ ,ι I':) T/I‘ ’ I/'7 ι'‘ , DOr (ι I‘ -’ ‘ ξ''˙ ‘ I‘ ' ‘ I” ・ ''ι I‘ ’ 〃η I‘ -’ i' ‘ ¡ '‘ '', ':''I' 7, ’‘ '‘ ¡¿ '’ ' ':/'':' '‘ :,I’ ‘ ,' ιιI’ ' ', tII( I'’ ι:〃 ’ :) ‘ I''˙ ‘ ’ι、 'Io'’ :' 7I’ ' '‘ ,I’ ρ ' τI ''' I' R‘ ,I,˛,' ¸˛˙ ’ ' ‘ ,' "Γ 〃I' I'¡ ζ ' ': T/'ι ’ ‘ :˙ ˛ "7'I,ι , A:I' I,z‘ : I''ι I':、 ‘ :’ ' ‘ ''' '/'I''Ig :' ‘ :,¿ I ''(:’ ˛'‘ I '‘ , 〃 '‘ IA:' ι:z '〃 ’ ( ''/ ’ ztI 7¡ ˛,Iχ '' ‘ :' '‘ ‘ II,' I,‘ ˙ ''I'’ I‘ ‘ ˙ '' T/¡'I:' I'' ‘ :¿ '‘ 'I,/'I 、 ''‘ - ι:I'ι 'ι I '7,'pIt'’ 7:Iι ’ ’ "ι'〃 ‘ 〃:' ‘ I/˙ Γ/“:’ Π ‘ '‘ I' 'Iι ,':'‘ 'I ''7II'I(' I’ ‘ ' ''‘ :¡ ‘ /,‘ ,J ‘ /‘ ' , I.'I’ ・CPU : ATmeag128・ 16Mhz . Pnogr'am downloade''- ISP cable . Program : AVRGCC . Ser/o 'll1oto「 : 18EA . TYpe : AIuminm Body frame . Vdtage : DC6V . Zigbee RF Cㅇ ∩troller . Toaching Program . lSP Cable (Pr'ogr'amming with C-language) . Wireless CCD Cam (option) TIz' R‘,¿oI K’ ' I● ˙ιι7:‘ ,¿z'‘ ' ˛〃ιΔ ‘ ':'I,’˙oτ "・ RC oT˙ ‘ II II‘ 'η oη ’ oτ ι, T˙ r)¸ o' ''per’ '7'eη Λα 'Io''. B, τι '’ I'‘ I''g ,ol l ’ ' ι:ρ 〃 'η 'r)'' RC 〃'τ I˛ ・t 〃 ’‘ ' α 'ℓ ¿ㅏ ',力 e''’ ˙l ' 7“,¿ o' 力αs ‘ 'γ ι 'eII'’ '' 'Tα ˛ 'I‘ 〃L Λι¿Iλ Iη ‘ ' τι ’ ˛’ f,+ O'ι γ˙,'η α/I N’ 'Π I ¿ ‘ z''e’ ’ l,¿ ι˛ㅣλ ', α7:I‘ I Y力 ' 〃:zoΛoT ˛ '‘ ,7z〃ㄱ ‘ ,IIα ’ ηzα ‘ I’ zδ 'Iz'7'e I:' pleΠ ': " '˙ oo〃:' I'''‘ ':ι I¿ '"Γ αtIJI'Io7’αI 'I'ε 〃ㄱoT'’˛¸. ㅏ1/● I’ ‘ "・ ι ' φp'Io7zα I ‘ ¡ '('˛'' ’‘‘ ,’ Ie● , ¸τι ‘ I’ “ δαPι ι ’ , α7z‘ I TiI' oΓ g'˙ 'PP'':‘ , '˛ ,I'/, ’ :η αη・ 〃zoγ ' ’ T' 'Iz˛ ' ’ ・ ''’ /)7:π ' . CP∪ : ATmeag8-8Mhz . P''og''am downloader— ISP cable . P「 og ''am : AVRGCC, Codevisio∩ ・Servo Motor : 2EA . 4EA DC motors . IR Remocom . Wi 「eless CCD Cam (option) I' (‘ ¡ ''' '' ‘ ¡ '俠 ''・ ''/z 6 /''' ㅑ1:¿ '/(I'':ζ ' I¸ ': ,' ''' I '‘ , 'I'‘ "'':' ιI'I∠ I ‘ :˙ αη〃 ’‘ ,' ' /’ :¸ '˙ '' ‘ I'˙ιI. I,‘ '‘ : A1' ‘ I’ :∠ I ι〃I∠ I I<', ’ ¨/I . 1t can walk with 6 Iegs . W섧 king by 3 seⅣ ㅇmotors a∩ d can move fonNard, backward, leΠ, rig ht . When f''ont tacti le senso「 co∩ tact son e obstades it mㅇ ν'e backward and gㅇ right ㅇr leΠ ・CPU : AT90S2313 (A'VR) . Motor : PWM PuIse SeⅣ o Moto「 3EA . Se∩ sor : Antenna Sensor ・Vdtage : DC4 5˘dt (1 5VAAA size 3Ea) ・Size : Horizontal( ) ×Venical( ) ×Height( ) . ISP cable, manual! c¡ rcuit diagram, sou''ce CD ・C La∩ guage(AT90S231 3) . ∪ser can dowⅲ oad the p「 og「arn by the lSP cable . Ybu can lear'n how to walk a hexapod ''ㅇ bot I力 ' I˙ ‘ ,¿ ‘ ,' ε ‘ 7'’ ¿ ' ιo'If oII'ι I ,':'I〃, ‘ 7 /t’ ε '˙ ‘ γ ‘ I'o ''' +oΓ ’ ˙ι〃 'O" εl )I'〃 ˙r)I ‘ ˙,/,'' αI˙ 'O'' AII",I’ O'’ 'υ 'ι ' op‘ ’' α ''o'' ε ''’ ¿ ' ‘ I(・ 力 '‘ ' ,・ '‘ I Tγ α ‘ I'I' '’ ' ‘ z '’ ’ Ic'˙ o˛ o''〃 oII''˙ ‘ z''‘ I ‘ ξ’'z'' 'I , TI'ι ' Ro¿ o' I:I' ’ ', ‘ ι'ι,l,'.'',Y εIz':,','.,I˚ '' )ρ '"・ RC o'˙ ‘ γιI '‘,I'O'’ 'O'I' '˙ ‘ ,¿,‘ ,' 'tl,'' ''’ :' 'η IαIIoη . IE')’ τ 'T’ I’ τIη g ‘ oη :'' ˛ 'o':’ '〃 '‘ ,7' I근 ε〃II˛* 'I’ i':' ‘ '’ '‘ I '・ '・ /'˛˙ 'I' '/'α 7τ,¿ ‘ ,' /zι '‘ ˛ 'σ'Π'’ ,' ''˙ ‘ ι "Ioη . 'ι ¿IλI':'g τι(,' ‘ υΓ ‘ ,〃 T '’ 7zα II N':'ν H ¿,‘I'''’)’ pα ˛:t., α ''J '力 ' I’ 'O〃 ,'˙ L— o7〃, oIT''˙ 7:'''α ':z:, 〃,e''e I‘ pI‘ ’',η ιι/˙ , ˙oo',z ''z:,’ ‘ ∴ ' Iˇ ’ Γ'‘ IJ''Ioy'ι ' I 'I'‘ '〃'o’' ,‘ ':': 'ㅣ ¼ ' /zι ι˙ ’ ’' ep'Io''α I αει ''Ξ soI・ 'ξ '‘ , ',τ 'ι 'II α '' ‘ I Pα I' 'υ ztI TiI' o7' 'Γ ''P''˙ ', ’ ,',I'力 '''α ''''! 〃 'o’ ¿I7' III' ) ’ ‘ ,7:λ :'
- 13. T/〃¸1 ,Iχ 'T I¸ ’ ¡˛ 'I:〃 OΓε˛ ‘ 〃z〃 1‘,IIξ J I,、 AI:'''˙ ''2t' I:' εPυ ι'::''Γ ι '‘'77 ,7'‘ ,'● ‘ : ¨l /z˛ ' ’ υυo' ‘ 'Iz '’ ‘ 〃 ’‘ ’˛IIo'z 'r) 〃,α ' ˛γ)ι I〃 I I,' zI,'J α ', ι7 '‘,ιτξ˙ '' '‘ ,Iχ:,y . This 「ㅇbot is remote contr˙o"ed by ATIiny2313 CPU ・Use「 can coⅲ r어 the robot tㅇ n ove any diredion and it could be ∪sed as a socce'' robot . CP∪ : ATtiny2313(replace AT90S2313 cpu) ,ATmega8 . ⅳ 'ㅇ tㅇ '' : robo Gear Box. Power: 4 AA ba卄 e㏉ ・Buzzer . Remote contrd receive se∩ sor . ISP oable ・C - language (use Codevision) . Manual CD . C source program ・Not suppoㅐ ASM p''ogram . User can inseⅱ the s칡f made program by isp cable . lt is gㅇ ㅇd for learning basjc concept ㅇf sensor . Line tracer for begin∩ er lt has lowe'' price and best performance fo「 θIementaⅣ schoo1 robot progranㄱ . Ma∩ y eleme∩ tar/ schods use this product ・CP∪ : No—cpu(operated by logic lC) . Motㅇ '' : DC 1● lIotor 2EA[''ㅇ bㅇ-gear— box] 。Senso'' : 2EA EL-7L ST 7L . Power : DC4 5Volt (1 5VAAA s¡ ze 3EA) . Size : Horizontal( ) x Meⅱ ¡cal( ) x Height( ) . Manua| . This is ve㏉ simple Iine tracer and operate with 74HC14 1ogic elemont . lt is good fbr learning basic co∩ cept ㅇf sensor . Used for teaching mate「ials for elementaη schoo1 . The Lowest pr¡ ce i∩ he wo‖ d AI˙ ', 7'I '' A '・ :I' (AT,''ι ’:'ι ¡ ' Iι -, ιη,pI''‘ '/ ι ''’ ι '':' ‘ ¡ '‘ ˙˛ '': ~,‘ 'II ι ' I''/'・ ι¡ ''˙'‘ ¡/ ',(''’ ',/,' ', ‘ 7Γ˛ ’ /,I˙ ‘ '‘ I', ‘ I' 」,''’ ''' ’ K I,I‘ :'ι 'Å /II ’ (’ ‘ '''‘ I '''ι ,' ' . Atmel's AVR (ATmega1 6) applied Linetracer ・Fㅇ | Iow black line with 8pair of i∩ frared se∩ so「 s . V¸rious 이ectric paⅱs ㄴED, segment. se''i쉐 conn n ∪∩icat¡ o poⅱ , i∩ te''rupt. DC motor cㅇ ∩trd. senso「 contol expe「 iment a''e ava"aUe . Most e仟 edive produd for teach ATmega1 6 CPU . Ma∩ y high school and univer'si㏉ use this products ・CPU : ATmega16 . Motor' : robo- DC gear— bo× (2 DC motor) . Sen sor : 8 l nf''ared sensor([Eㄴ -7니 . [ST-7니 ) . 7 segment. 8 bit LED, |∩ frared se∩ sor(ND conveⅱ expe''i'ㄲ ent av˙ ailable)Powe'' : DC4 5Vㅇ1t (1 5V AA size 3EA) ・etc : buzzer . ISP cable (P''og ''am downloadi ∩g) . Seri섧 communication caUe . ReaI product could di仟 er w'th picture . C source prograrn . Program is wri卄 e∩ by C Ianguage and 1ocated at CPU . ∪se「 can dowⅲ oad he progran by the dowⅲ oading cable ・Good ior the people who learning about basic consept ㅇf . A∩ adν anced progr˙ amma비 e I¡ ne tracer robot When it meets with a∩ obstacle while fㅇ ‖owing a dar'k li∩ e . lt stops tur˙ ∩s 180 and cㅇ ∩tinues ㅇn . lt fd‖ ows any black line o∩ white ㅔoor, using infra「 ed senso''s to identi㏉ the line . Because black a∩ d white cdo「 reΠ eds diffe''ent an ㅇu∩ t of infrared! the ''obot can detect he d'仟 ere∩ ce. fo‖ ow¡ ng black li ∩e . CP∪ : AT90S2313 - AVR CP∪ . Motor : ''obo- gear— box . Sensor : IR senso「 6 ( [EL-7니 3EA! [ST-7니 3EA ) — bohorr view . Highㅢ urr)inant・LED 2EA. CDS 2EA. f''o∩t view . Power : DC6Volt ・etc : buzze「 ・weight : g (body)/ g('∩ cluded ba卄 e㏉) ・Size : Horizo∩ tal( ) ×Vertical( ) ×Height( ) . P''ㅇ g''am dow∩ |oadi∩ g : ISP cable . Man∪ aI CD . Real product could di仟 er with picture . Basic color is black ・C source program . Prog''am is wriㅒ e∩ by C Ianguage and located at CP∪ . ∪ser can dowⅲ oad the program by the dowⅲ oading cable . Good for the people who learning about basic consept of . Line tracer for beginner It has lower price and best performance for elementar/ school robot prog ''am . Many dementar/ schools use this prod uct ・CP∪ : Nㅇ・cpu(operated by logic IC) . Moto'' : DC Motor 2EA[robo-gear— bㅇ×] ・Se∩ sor : 2EA EL.7L ST:7L . Power : DC4 5Volt (1 5V AAA size 3EA) . Size : Horizontal( ) ×Veⅱ ical( ) ×Height( ) . Manua| . This is ver l simple linθ trace「 and operate with 74HC14 logic element . lt is gㅇ ㅇd fo'' Iear∩ i ∩g basic concept of sensor . ∪sed for teaching mate''ials for e'ementary schoo| . The Lowest p''ice in the wo‖ d ⒂℉투1F::':
- 14. (:1',''˙ αI'J I’ ’ ' C— I¿ 1 ’ '〃 ι7j'' '1‘ ,I,o' '/● ‘ ¿Y εα7z Ile˛ o‘ ’ ’ '˜ ℓ εIeIγ ,Iηg δι ’ τ '''J. TIz’ :, '˙ oI,o' I , 'Iz' ¿˛ ‘ ˙ ' rr 〃・Ieα ’ ˙ ''''’ g 7˙¿ 'ε ( ’ gη Iτe ♂oιι ''¿ ιI‘ ?I'ε〃 ’ zg ‘ ,I, ’ /ι '˛ I*' p’ ˙og’ :α '’ υ) 1eJ I1‘:,¿ o' αI,/’ 71¸ ' —:: ::-: ::::::: : :: : ::● i :::: :::: :::-:::-: - : . This is dapping sound recognize robot applied ATMEL’ s AVR AT90s231 3 . It reacted to dapping, it move forward— stop —turn le' — stop —turn ''ight —stop fδ 1ㅣ owing each dap in order . Detecting obstades and avoid by・ front infrared sensor . Ybu can move this robol what you want by adjust software . BESTSELLER!! :::: ::; :: ::::: ::: : ::::::: :: ::- - : . CPU : AT90S2313 . Motor : Robo DC gear bo× (2EA DC) ・Sensor : 3Set σf 'n¬ rared Sensor([ㅌ L-7니 [Sㅜ :7니 ) . Mic sensor(recognize sound) - 1 EA . Power : DC 6Volt (4EA1 5VAAA size ) . Size : Horizontal( ) xVertical( ) ×Height( ) . Buzζ zζ er . ISP cable(p「 ogram downloading) . This piclure might be di∏ erent with re짊 product . Basic color is black :::: :::::::::: : : :: :::::: -: . Provide C source program . Program is bu"t in CPU and wri卄 en by C- language —:: :::: -::: :::::: ::: ::: :: ::: . User can dowⅲ oad the prog㏊ rn by the ISP caUe ・lt is good for learning basic concept of sensor I㎩ I, "o¿ o' yeα c'δ Io ιχIeTηαI δo〃ηΔj ” πιI7zIηg T샹 力η ι싼 α,IΔ εO,I〃 ηIII/Ig Oη 뿜후ㅏξ≠i+*主 묩부幸 . Sensor : Micr˙ ophone * 1 . Motor : ROBO— GM Gear Box(including 2 DC Motors)*1 . Speed : Speed control'ed by var¡ ab]e resistors . LED : Sensor indicator * 2, Power indjcator *1 ・Power : 4 * AA batter¡ es(not induded) 嬖Y⅛ 年높 =fξ '. ‖lust降 ted User Manu쇄 . Available un— soldered q,˛ '7 ‘ 〃 '‘ / " c-'“ '''''ι α ''e '1oI,o' I力 ‘ I' ει¡ 'η 7˙ ξ'(:og’ 'Iτ ‘ ' ‘ ''‘ {Pp’ ’ :zg ¸o〃 ''ι I. TI’ '」 , '1o¿ ‘ ,' ', 'I'' l,'‘ IjIυ 7 I'ι 〃 ’ 'I’ zg 't'ε /lgη tα 'oτιI'J, ‘''ⅱ 'ε I''''⅞ ' oI,'‘ Λι7ε T' I,'‘,gT ιI’ :'z , oI’ ( )' α ' I''˙ 」,' - "● Ig/'' ‘ , g’:ι '':''¸ :-:: :::: :: :: ::::: ::::::::::: : ::: :::::: : . This robot is the best for learn¡ ng recognize sound, detecti∩ g obstade program robot at nrst . Programmed by Basic language . lt reacted to da하 )ing, it move forward— stop —turn IeΠ ・ stop —tur∩ right —stop foIlowing each clap in order :::: :-::: : :: ::: : ::::::::: : ・CPU : AT90S2313 CPU (Provide New AVRBasic module) . Memory : 24LC32 ・Language: RoboBIock Basic . Se∩sor : Sound 「ecognize sensor(mic sensor) - 1 EA . 2EA ㅌL-7L —recognize obstacle . Motor : ROBO Gear box - 2DC motor ・Power : DC4 5Volt (1 5V AAA size 3EA) . Down10ad cable: RS-232C . User ma∩ ual CD :::: : :: ::: : ::: :: ::: ::::: . Program could be downloaded by serial pㅇ ㄸ . lt is gㅇ ㅇd for learning basic concept of sensor TI,e H'γ "poΔ KI' γℓαII, ’’ αλ ' τ 'δ Iηg α,'〃ΨIψ eJ ˛ ’ ℓ71‘ ’ ‘ ,η ‘ υΓ '力' αIΛ 'Γ ,,α I':’ 'g "η ,oJ ♂ι 'I'. Πzℓ 71/,I,oI‘ ,':x Ieg, α ’ le ˛ ‘ ,7zI7:ι,IIetI ˚'I''1'e f,'I'・ o(, Io p“ ,˙νItle"tII 力o'・ ’ τoη Tα I 〃 'o〃 o’ ' α "Δ o˛ ’ υ・I " e/ ˛ ’eγ 〃˛αI Iℓ K I#. η '⅛ 71oI’ oT pI¿ τψ, l)I ια '' ’"I7I',O'˙ ' ¿〃l l˛pe7 s˙ ’ ・,’ IIε 力 '', o7・ II근 δe〃 ‘ oI TI・ ’ :」 , p'10ε e,'o'' l α¸'’ ,o˛ 'g/, 〃 'e〃 zo': ’ '¡ o 'l.δ I'''ε Y YI'e 71o¿ o' 'o ” ’ α 'Iι /r,Γ,νι "J ι,’ 7''˙,’ ξΓ,e α〃J '〃 ':'' I‘ 乙/子 oy I˙ ∴ζ力I, 〃eleT ‘ ˙ ’ ,’ ''¡ εI' oΓ IR S"'‘ ‘ ,7:: Γ˚7' /,,o'1' αΔ˛αηε 'J P’1OgYt〃,1〃 '’ Πg, A I,oj,' Pε I, Λee'ιI⌒eΔ Io Joil 〃Ioα Δ p, ogΛ α〃 '‘ Λo I力 ℓ ’ 1o¿ o' :- :-:- ●:::::- :: ::: :: -:::-: . Sensor : Antenna Sensor ・Motor : RBM-50s Serv˙ o Motor * 3 . LED : Sensor indicator * 3 ・ㅌmi卄 er&Sensor : Highㅢ um¡ nant —Lㅌ D * 2 . Receiving light : IR Sensor * 2EA ・Power : 3 * AA ba“eries(not induded) . Port : lSP Porl(for programmable) . IIIustrated User Manual . Pnogrammable CD is included . Available un— soldered TI'I' ’ ㄱo¿ ‘ ,' I‘ αIIηe"‘ι˛ξΓI力 α/ e/,ι ''˙ αΛ 'ι I l,i Bυ ,Iε ’¿ '〃 g"‘˛g'. B'δ ' "˙ o˛I'ι ι:˙ ' Iυ ’ ・υξg'I’I''': ::: :::- :::::: ::: :: :::: :-:::: -: :::::::: : . Best product ‘br beginner at programming . Operated by Basic language program lt is good for the stude∩ t who learn nobot p¨ ograrnming :-:: ::: :::::::: :::: :: ::: :: :::: : . CP∪ : AT90S2313 CPU (Pnov˙ ide New・ A'VRBasic module) . 1 /emo㏉ : 24LC32 . Language : RoboBIock Basic . Sensor : 3EA EL-7L, 3 EA ST-7L . Motor : ROBO Gear box - 2DC motor . Power : DC4 5Volt (1 5VAAA size 3EA) . Down1oad cable : RS-232C ・User manual CD :-:: :::: :::: -:: : :::: :: : ::- :: :: . Program cou ld be dow∩ loaded by serial pㅇ ⅱ . lt is good ‘ ㅇr learni∩ g basic concept of sensor 7:I〃 ' I’ ‘ ¡ ' 'I(:・ I'η ˛’-Π ι 'ι I''''' '‘ ,¸ υ ' ” /Iρ 'ㅏ ‘ ι7 ι;I¿ I':λ I'7¡ ˛' ㎙ ’ Δ r,I'˙ ' ‘ 'Io〃 t ‘ Η ’‘ 乃y ‘ - ‘ 'I‘ ˙,’ ι˙ιI /Io‘.,Γ ι,Γ ι,〃 ''Γ '’ , ’ ρυ '/’ ,I''"㏄ . LED : Se∩ sor indicator * 2 . Power : 3 *AA Baㅐ eries(∩ ㅇt j∩ duded) . Moto'' : ROBO、 GM Gea「 Box(including 2 DC 'ⅵ ㅇtors) * . Senso'' : EL-7L(emi卄 e''), ST・ 7L(receiv!er) ㅢ1lust「 ated ∪se'' Manu㎭ , Tbst・ Track . Available un— soldered
- 15. 드 : : 懶垂 푸,’ ˛ 쏟d υ춘¾J盛 魯ξ타・; 薛¾≡⅛傘 Th¡ s can be used eas‖ y as the rr'ov・ ing part of m¡ cro mouse or moving ''ㅇ bot 饌蓋SP숍 ξi⅜ ☆象둡들슝n —Stepping motor : 2ea (The actual coIo'' or shape may be slightly different from the picture) —Mouse body : (The actual shape of body may be slightly different from the picture) —BaII caster : 2ea —Mouse wheel : 1set (The actual color o「 shape may be slighⅡ y different from the picture) ROBㅇ ™ 〔≡〕::ㄱ EΞ]∶ : :::: :: : :::::-:: ::::::: : :::: : :: :: ::: : ::::: ::: :: : :::: : : :::::::: :: :: :::: ■ Product descr¡ ption You can make the best linei— acer with this product It can be fitted vvith 2EA stepping motors and l EA ba‖ ca§ ter 覇馨鎣灝윕罷晝擴罷萱윕臻廈灝晝遑喜晝힙寵罷畺볕璽畺蚩鎚壺 :::: :::::::: :-: :::::::: : ::::: :::::::: ::::: :::: ::: :: ::: :::: :::::: : ::: :
- 16. 豪廈蚩鎚頀晝鎚萱萱윕輓晝鎚晝寵勳蚩蚩姦蓋蹙畺翕畺晝擬壺 ㄿ ˛ψ ψ 북 =≠ ㅑ●¼ ●碑 猝 秊 ¾꾹리 丑 碎 海 出 덮 ¼珞 *哲 密 곡 ≒ 털 醱P『 odug菴 《⅜응$c姸Ip꿩 ⅝on Th¡s Products ¡s very˙ Iow cost servo based drive system set. It is comprises two standard servo's, factory modified for oont¡ nuous rotation and two servo whe이 s 惑Ξ푠륨휩K 鬪