Unlocking the Power of ChatGPT and AI in Testing - A Real-World Look, present...
Download
1. Chương10 . TRUYỀN ĐỘNG ĐIỆN TỜI, NEO TÀU
THUỶ
10.1. - ĐẶC ĐIỂM, CHỨC NĂNG, PHÂN LOẠI, CÁC THÔNG SỐ
CƠ BẢN CỦA HỆ THỐNG
Tời neo là thiết bị dùng để thu, thả neo, kéo dây cố định tầu khi cập bến.
Cấu tạo chung của tời neo bao gồm: Động cơ điện và thiết bị điều khiển, các
bộ phận truyền động cơ khí, hộp số, trống quấn xích hình sao, trống quấn
dây, ly hợp, phanh đai cơ khí xích neo, neo.
Theo kết cấu cơ khí, tời neo chia làm 2 loại tời trục đứng và tời trục ngang.
Trên tầu hàng, tời neo mũi là các tời trục ngang, nó được thiết kế để đồng
thời thực hiện 2 chức năng thu thả neo khi cố định tàu tại điểm đỗ hoặc thu
thả dây buộc tàu khi điều động.
Đa số các tời trục đứng, động cơ và hộp số cùng các thiết bị điều khiển nằm
bên dưới mặt boong, loại tời này dùng thu thả dây buộc tàu khi điều động.
Loại tời này thường đặt sau lái. Hoặc 2 mạn trên các tàu lớn để thuận tiện
cho việc làm dây
Các thông số cơ bản của hệ thống tời neo là: Lực kéo, tốc độ thu neo, thu
dây, thời gian công tác. Khi nhổ neo, thời gian công tác phụ thuộc độ dài
xích neo và tốc độ thu neo.
Đặc điểm của hệ thống tời neo là chúng làm việc trong chế độ ngắn hạn
(khoảng 30') tải thay đổi trong khoảng rộng 30 200% trị số định mức,
động cơ phải có khả năng dừng dưới điện trong thời gian 1 phút.
10.2 CÁC YÊU CẦU CƠ BẢN ĐỐI HỆ THỐNG TỜI NEO
Neo là 1 hệ thống rất quan trọng có quan hệ trực tiếp đến an toàn của con
tàu. TĐĐ tời neo cần đảm bảo các yêu cầu sau:
- Có thể sử dụng neo trong mọi điều kiện thời tiết và trạng thái mặt biển
với yêu cầu cho trước.
- Có thể khởi động với toàn bộ phụ tải.
- Đảm bảo lực kéo cần thiết khi thu xích neo ở tốc độ chậm hoặc dừng dưới
điện.
- Động cơ dừng dưới điện có tải trong thời gian 1 phút.
- Có khả năng giữ neo ở trạng thái treo khi mất điện áp đột ngột.
1
2. - Đảm bảo điều chỉnh tốc độ trong khoảng rộng từ tốc độ thu neo bình
thường đến tốc độ chậm đưa neo vào lỗ neo.
- Khi hoạt động không gây ảnh hưởng đến công tác của các hệ thống
khác.
Theo yêu cầu đăng kiểm, công suất tời neo cần phải đảm bảo thu neo với
tốc độ lớn hơn hoặc bằng 0,17 m/s với lực kéo trên đia hình sao > F1 = 1,13
(qH + G)
- q: Trọng lượng 1m xích neo (N/m)
- H: Độ sâu thả neo (m)
- G: Trọng lực neo (N)
Mô men khởi động cơ cấu neo khi xích neo đứng yên cần nạp lực kéo
trên đĩa hình sao không nhỏ hơn 2F1. Cơ cấu neo phải đảm bảo đồng thời
thu 2 neo ở độ sâu 1/2 độ sâu thả neo. Tốc độ thu neo khi gần tới lỗ neo
không lớn hơn 0,167 m/s. Tốc độ kéo neo vào lỗ không vượt quá 0,017 m/s
(< 7m/ ph)
Theo điều kiện phát nhiệt, thiết bị tời neo phải thu neo với tốc độ và lực
kéo lớn hơn 2F1 liên tục trontg thời gian 30 phút hoặc thả một neo với độ
sâu quy định.
Nếu dùng động cơ KĐB rôto lồng sóc cho tời neo sau khi làm việc với
thời gian 30 phút với tải định mức, động cơ phải đảm bảo làm việc ở chế độ
hãm ở điện áp định mức trong thời gian không ngắn hơn 30 giây.
Động cơ một chiều và động cơ không đồng bộ rôto dây quấn cũng phải
đáp ứng các yêu cầu trên, nhưng với mômen bằng 2 lần định mức.
Nhiệt độ động cơ sau khi làm việc ở chế độ hãm không được vượt quá nhiệt
độ cho phép 70%.
Đối với tời quấn dây, sau khi làm việc liên tục 30 phút động cơ phải đảm
bảo làm việc ở chế độ hãm trong thời gian không ít hơn 15 giây.
2
3. 10.3 - ĐỒ THỊ TẢI CỦA QUÁ TRÌNH THU NEO VÀ TÍNH CHỌN
CÔNG SUẤT ĐỘNG CƠ
Chế độ công tác cơ bản của truyền động điện tời neo là chế độ thu 1 neo
ở độ sâu bình thường. Theo giá trị mômen trên trục động cơ khi thu neo,
người ta tính công suất động cơ thực hiện.
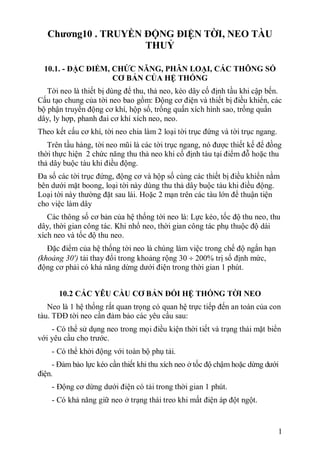
Để dễ dàng xây dựng đồ thị tải cho tời neo, toàn bộ quá trình thu neo
được chia làm 4 giai đoạn (Hình 10.1)
F2 F1
F3
A5 A4 A3 A2 A1
B1
o
IV III II I
Hình 10.1
Giả sử neo ở vị trí "0" dưới đáy biển, tàu ở vị trí A1. Đoạn 0B1 là đoạn xích
neo nằm dưới bùn. Đoạn B1A1 là đoạn xích neo treo tự do trong nước. Khi
thu neo tàu chuyển động với tốc độ v dưới tác động của lực kéo F1 = const, do
vậy mômen quay trên trục động cơ Mc1 = const. Khi tàu tới vị trí A2, lúc toàn
bộ xích neo được nâng lên khỏi bùn là lúc kết thúc giai đoạn 1 và bắt đầu giai
đoạn 2. Lực thu neo tăng dần do xích neo căng dần, tại điểm A3 lực kéo đạt
cực đại, tốc độ động cơ giảm nhiều. Tàu tiếp tục tiến về phía trước nhờ quán
tính nhận được ở giai đoạn 1 và đầu giai đoạn 2. Giai đoạn 3 là giai đoạn tàu
chuyển động về phía trước với lực kéo trên trục động cơ bằng hằng số và cực
đại. Kết thúc giai đoạn 3, neo được nhổ lên khỏi đáy biển.
Sau khi neo được nhổ lên, mômen cản giảm dần theo quá trình thu xích
neo. Xích neo ngắn dần làm mômen cản giảm xuống. Đây là quá trình thứ 4
và quá trình này kết thúc khi neo được thu vào lỗ neo.
Đồ thị tải quá trình thu neo như hình vẽ ( Hình 10.2)
3
4. Mc
Mc3
Mc2
Mc1 Mc4
t
t1 t2 t3 t4
Hình 10.2
Để lựa chọn đúng động cơ, cần phải xác định được giá trị mômen quay
tại thời điểm tức thời bất kỳ trong quá trình thu neo, tốc độ quay của động
cơ trong từng giai đoạn thu neo, thời gian từng giai đoạn.
Các thông số để tính toán bao gồm:
- G : khối lượng neo
- q : Khối lượng 1m xích neo
- H: độ sâu thả neo H,
- T: Thời gian thu neo
- L: Độ dài xích neo L,
- Tốc độ gió lớn nhất cho phép kéo neo, tốc độ dòng chảy, diện tích
chắn gió của tàu.
10.4.TÍNH CHỌN CÔNG SUẤT ĐỘNG CƠ TỜI NEO TẦU THUỶ
Khi tính toán hệ thống TĐĐ tời neo tàu thuỷ, ta cần xác định công suất
tối ưu cho động cơ để thoả mãn nhu cầu đăng kiểm và giảm đến tối thiểu
khối lượng kích thước và giá thành hệ thống.
Để tính toán công suất động cơ tời neo, người ta dùng 2 phép tính gần đúng.
Trước tiên, tiến hành tính toán công suất động cơ thực hiện bỏ qua tác
động quán tính của con tàu, có nghĩa tốc độ chuyển động của tàu trong thời
4
5. gian kéo neo không đổi. Nhiệm vụ tính toán ở giai đoạn này là lựa chọn sơ
bộ công suất động cơ theo cataloge.
Ở giai đoạn 2, tiến hành nghiệm động cơ đã chọn theo mômen, thời gian thu
neo, điều kiện phát nhiệt. Ở giai đoạn này các tính toán có tính đến quán tính con
tàu.
Dưới đây trình bày cách tính toán công suất động cơ neo bằng phương pháp
gần đúng ( giai đoạn I )
1 - Xác định mômen định mức động cơ cần xác định mômen cực đại.
Mômen khi kéo neo khỏi bùn (đáy biển).
Fb .Rs
Mb ( KNm) Trong đó Fb = 3,5.G + q.H
co . lv .i
Fb: Lực kéo neo khỏi đáy biển. H: Độ sâu thu neo (m)
G: Trọng lực neo (KN) i: Hệ số truyền
q: Trọng lực một mét xích neo (KN/m) R: Bán kính đĩa hình sao (m)
cơ: Hiệu suất cơ ln: Hiệu suất lỗ neo
+ Mômen kéo neo ở độ sâu bằng toàn bộ chiều dài xích neo:
Fl .Rs (G qL).Rs
M1 ( KNm)
co ln .i co . ln .i
- L: Độ dài xích neo (m)
+ Mômen kéo hai neo ở độ sâu H
F2n .Rs 2(G qH ).Rs
M 2n ( KNm)
co . ln .i co . ln .i
Giả sử mômen trên trục động cơ đạt cực đại ở chế độ kéo neo từ độ sâu
bằng toàn bộ chiều dài xích neo, tức Ml>Mb>M2n. Ta sẽ chọn động động cơ
theo mômen này với hệ số quá tải động cơ theo mômen =1,9 ta được
mômen định mức tính toán
M
M dmt L
i
Với tốc độ thu neo trung bình cho trước Vttb, tốc độ quay định mức theo tính
toán của động cơ không đồng bộ rôto lồng sóc là:
nđmt= ntb (1 – sđm)
+ ntb tính theo công thức:
5
6. i.Vtb 1
ntb 0,16 .
Rs S
Với động cơ không đồng bộ rôto lồng sóc sđm= 0,10
ndmt= ntb. 0,9
+ Công thức công suất định mức tính toán của động cơ thực hiện được tính
theo
2 M dmt n dmt
Pdmt ( Kw)
1000
Theo kết quả tính toán trên, chọn động cơ theo cataloge. Sau khi chọn
động cơ tiến hành giai đoạn 2 để kiểm nghiệm động cơ đã chọn (bạn đọc có
thể tham khảo ở giáo trình chuyên ngành điện tàu thuỷ).
6
7. 10.5. ĐIỀU KHIỂN TỜI NEO TÀU THUỶ
10.5.1. NEO ĐIỆN MỘT CHIỀU TÀU ĐÔNG LONG
1.Giới thiệu phần tử:
Hai động cơ thực hiện 1P1 và 1P2 kèm phanh điện từ dạng đĩa.
Động cơ KĐB rôto lồng sóc (P) lai máy phát và máy phát kích từ.
Máy phát một chiều (G) có 3 cuộn kích từ (IIKO) kích từ song song (IIIOG)
và cuộn bù (HOI).
Máy kích từ hỗn hợp (B)
Tay điều khiển: trừ vị trí “0” mỗi phía có 6 vị trí ứng với 6 tốc độ thu thả
neo.
Điện trở điều chỉnh kích từ và phóng điện cho cuộn kích từ máy phát P0 – P9,
1CP.
Điện trở cho cuộn kích từ của 02 động cơ thực hiện 1CP, 2OP, 2CP, 3CP…
Hai động cơ thực hiện và tay điều khiển đặt trên boong mũi, các thiệt bị còn
lại đặt trong hầm mũi.
7
8. 2. Nguyên lý hoạt động:
Hệ thống đảm bảo hoạt động đồng thời cả 2 động cơ thực hiện theo sơ đồ
nối tiếp ở mọi chế độ hoặc làm việc riêng lẻ từng động cơ nếu động cơ còn
lại bi hư hỏng. Lựa chọn số động cơ làm việc phụ thuộc vào vị trí công tắc
chuyển mạch PI và PII. Riêng ở tốc độ 6 phía thu neo không cho phép làm
việc với một động cơ.
Các bước thao tác như sau:
- Chọn số lượng động cơ thực hiện.
- Bật công tắc nguồn điều khiển BY trên hộp điều khiển động cơ truyền
động P. Đưa tay điều khiển về vị trí “0", tiếp điểm K22 đóng
- Ấn nút KP khởi động cơ lai máy phát và máy kích từ.
Máy kích từ B thành lập điện áp. Đồng hồ vônmét cho biết điện áp máy kích
từ. Điều chỉnh biến trở PB để có điện áp kích từ thích hợp. Đèn xanh PC
sáng báo mạch điều khiển đã sẵn sàng. Tuỳ thuộc vị trí PI, PII các cuộn kích
từ động cơ thực hiện 1P1, 1P2, các rơle PP1, PP2 được cấp nguồn qua điện
trở hạn chế 3CP, 4CP.
Để khởi động động cơ thực hiện, đưa tay điều khiển về vị trí “1” phía thu
hoặc thả neo, các tiếp điểm K1, K3, K5 và K7, K11 (thu neo) hoặc K9, K13
(thả neo) đóng.
K1 đóng chuẩn bị mạch cấp nguồn cho phanh điện từ TM1, TM2.
K3, K5 đóng sun điện trở hạn chế 3CP, 4CP trong mạch cấp nguồn cho
cuộn kích từ động cơ 1P1, 1P2. Các rơle PP1, PP2 đủ điện áp, đóng tiếp
điểm trong mạch cuộn công tắc tơ K, tiếp điểm K trong mạch kích từ độc
lập H0I của máy phát và các cuộn phanh điện từ TM1, TM2 đóng. Phanh
mở, máy phát cấp điện áp cho động cơ thực hiện, động cơ làm việc ở tốc độ
1.
Để điều chỉnh tốc độ động cơ tăng lên, ta tiếp tục đưa tay điều khiển về
vị trí 2, 3, 4… thu hoặc thả neo. Điện trở mạch kích từ độc lập H0I của máy
phát P1, P2, P3, P4, P5 sẽ lần lượt được sun bởi các tiếp điểm K16, K17,
K18, K19 (xem bảng đóng ngắt tiếp điểm tay điều khiển), dòng kich từ mấy
phát tăng làm điện áp đặt lên động cơ tăng dẫn đến tốc độ quay động cơ
tăng.
Để đảo chiều quay động cơ thực hiện, ta đào chiều dòng điện trong cuộn
kích từ độc lập H0I của máy phát bằng cách đưa tay điều khiển từ vị trí
“thả” sang “thu” neo hoặc ngược lại.
8
9. Muốn dừng động cơ, đưa tay điều khiển về “0", mạch kích từ độc lấp của
máy phát và động cơ sẽ bị ngắt, các cuộn phanh cũng mất điện, phanh động
cơ lại.
Kết thúc quá trình thu thả neo, dừng động cơ bằng cách ấn nút dừng KC tại
tay điều khiển hoặc trên bảng điều khiển động cơ.
3.Các bảo vệ:
- Bảo vệ “0" và bảo vệ thấp áp bằng công tắc tơ PP. Động cơ lai sẽ mất điện
khi điện áp quá tháp hoặc mất điện áp đột ngột. Muốn khởi động trở lại phải
đưa tay điều khiển về vị trí "0” để đóng tiếp điểm K22 trong mạch nuôi
công tắc tơ PP.
- Bảo vệ quá tải: Các rơle nhiệt 1PT, 2PT cắt động cơ lai P khi động cơ này
bị quá tải. Muốn khởi động động cơ trở lại phải đưa tay điều khiển về “0".
- Bảo vệ quá tải động cơ thực hiện: Khi quá tải, dòng tải tăng, cuộn bù HOI làm khử
từ máy phát, động cơ làm việc ở chế độ dừng dưới điện với mômen ngắn mạch định
trước.
- Bảo vệ mất kích từ động cơ thực hiện: các rơ le PP1, PP2 mở tiếp điểm trong
mạch cuộn hút công tắc tơ K, đến lượt mình công tắc tơ K mở tiếp điểm trong
mạch kích từ độc lập H0Ã của máy phát và mạch phanh TM1, TM2 để dừng
động cơ thực hiện.
- Bảo vệ ngắn mạch trong mạch điều khiển dùng các cầu chì 1PP, 2PP, 3PP,
4PP.
10.5.2. NEO ĐIỆN TÀU SAO BIỂN
1.Giới thiệu phần tử:
M - Động cơ neo 3 pha rôto dây quấn, điều chỉnh tốc độ quay bằng phương
pháp thay đổi điện trở phụ mắc vào mạch rôto.
RESISTOR R11 – R13: điện trở điều chỉnh tốc độ.
CONTROLLER: Tay điều khiển.
A, PL: Ampemet và đèn tín hiệu trên tay điều khiển.
43E: Công tắc cấp nguồn điều khiển và dừng sự cố
89: cầu dao cấp nguồn
88, 89B công tắc tơ chính và công tắc tơ phanh
51: Rơle bảo vệ quá tải.
BRAKE: Phanh điện từ
DR: Điện trở phóng điện cho phanh
9
10. 2.Nguyên lý hoạt động:
Tay điều khiển neo có 5 tốc độ, mỗi phía (DOWN – UP). Tốc độ động cơ
được điều chỉnh bằng phương pháp thay đổi điện trở phụ mắc vào mạch
rôto. Dùng phương pháp này vừa giảm dòng khởi động vừa tăng được
mômen khi khởi động.
Trước tiên, ta đóng cầu dao cấp nguồn 88 đặt ở cạnh bên phải hộp điều khiển.
Đèn hiệu PL trên hộp điều khiển và trên tay điều khiển sáng báo “có nguồn”.
Bật công tắc 43E về vị trí ON chuẩn bị mạch cấp nguồn cho công tắc tơ 88.
Do tay điều khiển ở vị trí “0", các tiếp điểm 51 – 52, 52 – 53 mở, cuộn 88
chưa có điện. Đưa tay điều khiển từ vị trí “0" về vị trí “1” phía thu (UP) - tiếp
điểm 51 – 52 đóng, còn tiếp điêm 52 – 53 chỉ đóng khi tay điều khiển lệch
khỏi “0" và mở ra khi tay điều khiển tới vị trí “1”. Thời gian đóng của 52 – 53
đủ để 88 hút. Mặc dù ở vị trí “1” 52 – 53 mở nhưng 88 vẫn hút nhờ tiếp điểm
tự nuôi. Tiếp điểm chính 88 đóng cấp nguồn cho động cơ, tiếp điểm phụ 88
đóng cấp nguồn cho công tắc tơ 88B và tiếp điểm 88B cấp nguồn cho phanh.
Động cơ làm việc với toàn bộ điện trở phụ mạch rôto ứng với tốc độ 1 (lúc
này U1 nối với U, W1 nối với W, V1 luôn nối thẳng với V).
Tiếp tục đưa tay điều khiển sang vị trí 2 (UP) tiếp điểm R2, R3, R4 đóng
ngắn mạch phần điện trở phụ R2, R3, R4 trong mạch rôto điện trở rôto giảm
làm tốc độ động cơ tăng. Động cơ làm việc ở tốc độ 2.
Nếu lần lượt đưa tay điều khiển tới vị trí 3, 4, 5 thì các điện trở mạch rôto
lần lượt ngắn mạch và ở vị trí 5 tốc độ động cơ lớn nhất. Động cơ làm việc
trên đường đặc tính cơ tự nhiên. Mạch hoạt động tương tự, nếu ta đưa tay
điều khiển về phía (DOWN), chỉ khác lúc này U1 nối tới W, W1 nối tới U,
V nối tới V1, động cơ được đảo thứ tự 2 pha nên quay theo chiều thả neo.
3.Các loại bảo vệ:
- Bảo vệ “0” bằng tiếp điểm 52 - 53. Khi động cơ làm việc, tiếp điểm 52 -
53 mở. Nếu mất điện áp đột ngột, công tắc tơ 88 nhả. Khi có điện trở lại
phải đưa tay điều khiển về vị trí “0" để cấp nguồn cho 88.
- Bảo vệ quá tài: Khi dòng tải tăng quá giá trị định mức, rơ le nhiệt 51 hoạt
động, mở tiếp điểm 51, cuộn công tắc tơ 88 mất điện, động cơ dừng.
- Bảo vệ ngắn mạch mạch điều khiển: Dùng cầu chì.
- Dừng sự cố: Công tắc 43E bật về “OFF”
10