Arduino: Reporte de diseño controlador acuario con Arduino
•Télécharger en tant que DOCX, PDF•
0 j'aime•343 vues

Arduino

Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Arduino: Reporte de diseño controlador acuario con Arduino
Similaire à Arduino: Reporte de diseño controlador acuario con Arduino (20)
Plus de SANTIAGO PABLO ALBERTO
Plus de SANTIAGO PABLO ALBERTO (20)
Dernier
Dernier (20)
Arduino: Reporte de diseño controlador acuario con Arduino
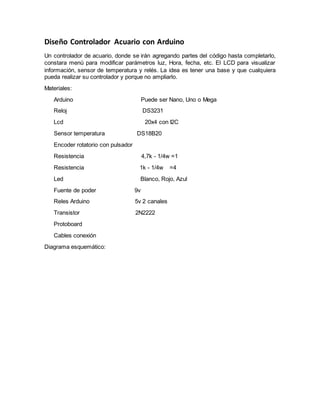
- 1. Diseño Controlador Acuario con Arduino Un controlador de acuario, donde se irán agregando partes del código hasta completarlo, constara menú para modificar parámetros luz, Hora, fecha, etc. El LCD para visualizar información, sensor de temperatura y relés. La idea es tener una base y que cualquiera pueda realizar su controlador y porque no ampliarlo. Materiales: Arduino Puede ser Nano, Uno o Mega Reloj DS3231 Lcd 20x4 con I2C Sensor temperatura DS18B20 Encoder rotatorio con pulsador Resistencia 4,7k - 1/4w =1 Resistencia 1k - 1/4w =4 Led Blanco, Rojo, Azul Fuente de poder 9v Reles Arduino 5v 2 canales Transistor 2N2222 Protoboard Cables conexión Diagrama esquemático:
- 3. Desarrollo Procedimiento con el código: Hola voy a hacer mi aporte: En esta parte del código: void loop() { unsigned long currentMillis = millis(); button.tick(); LeeEncoder(0, 7, 1, 1); // Lee el enconder de 0 a 7, de a 1 paso y con tope final. if (currentMillis % 6000 < 5) { // Si el resto de dividir currentMillis por 6000 da menos que 5... ImprimeFecha(); ImprimeHora(); ImprimeTemp(); } } Se va a cumplir cuando sea por ejemplo 6000, 6001, 6002, 6003, 6004 y en el "mejor de los casos" pero en el transcurso se cumple y se va a actualizar como 20 veces aquí un ejemplo de lo que digo: Ahora así como muestra por serial va actualizar en la pantalla para lo cual presentó algo que puede ser mejor tendrías que añadir las siguientes líneas y borra en el que tú tienes, espero se entienda.
- 4. #define tiempoPresentarDatos 6000UL // Tiempo al que se quiera realizar las acciones ejemplo 6s (1000ms = 1s) unsigned long tiempoActualDatos = 0; void loop() { if (millis() - tiempoActualDatos >= tiempoPresentarDatos) { // Si el tiempo actual menos el tiempo anterior es mayor o igual a 6 segundos tiempoActualDatos = millis(); // Actualiza el tiempo Actual //Resto del código que quieras que se cumpla cada 6 segundos } } Ahora también por ejemplo en esta parte utilizas una función y en el cual en una condición la utilizas para para comprobar si tiene tope o no. void LeeEncoder(int ROTARYMIN, int ROTARYMAX, int ROTARYSTEPS, int ROTARYTOPE) { encoder.tick(); // Lee el encoder y actualiza el puntero. La librería lleva la cuenta desde 0. newPos = encoder.getPosition() * ROTARYSTEPS; // Asigna a newPos el puntero del encoder multiplicado por los pasos. if (ROTARYTOPE == 1) { // Si el rotor tiene tope entonces no se pasa de valor if (newPos < ROTARYMIN) { // Solo si el puntero es menor a Valor
- 5. Mínimo -> encoder.setPosition(ROTARYMIN / ROTARYSTEPS); // Se fija el puntero al valor mínimo por los pasos newPos = ROTARYMIN; } if (newPos > ROTARYMAX) { // Solo si el puntero es mayor a Valor Máximo -> encoder.setPosition(ROTARYMAX / ROTARYSTEPS); // Se fija el puntero al valor mínimo por los pasos newPos = ROTARYMAX; } } if (ROTARYTOPE == 0) { // Si el rotor SI tiene tope entonces se pasa del valor máximo al mínimo y viceversa. if (newPos < ROTARYMIN) { // Solo si el puntero es menor a Valor Mínimo -> encoder.setPosition(ROTARYMAX / ROTARYSTEPS); newPos = ROTARYMAX; // Entonces el puntero saltará del mínimo al máximo } if (newPos > ROTARYMAX) { // Solo si el puntero es mayor al Valor Máximo -> encoder.setPosition(ROTARYMIN / ROTARYSTEPS); newPos = ROTARYMIN; // Entonces el puntero saltará del máximo al mínimo. } } } Lo que veo un poco innecesario ya que ese no va a cambiar en el transcurso del funcionamiento si no solo cuando se configura por lo que creo que se podría utilizar de esta forma como ejemplo #define encoderTope 1 void loop() { #if encoderTope == 1 if (newPos < ROTARYMIN) { // Solo si el puntero es menor a Valor Mínimo -> encoder.setPosition(ROTARYMIN / ROTARYSTEPS); // Se fija el puntero al valor mínimo por los pasos newPos = ROTARYMIN; } if (newPos > ROTARYMAX) // Solo si el puntero es mayor a Valor Máximo->
- 6. encoder.setPosition(ROTARYMAX / ROTARYSTEPS); // Se fija el puntero al valor mínimo por los pasos newPos = ROTARYMAX; } #else if (newPos < ROTARYMIN) { //Solo si el puntero es menor a Valor Mínimo-> encoder.setPosition(ROTARYMAX / ROTARYSTEPS); newPos = ROTARYMAX; // Entonces el puntero saltará del mínimo al máximo } if (newPos > ROTARYMAX) {//Solo si el puntero es mayor al Valor Máximo-> encoder.setPosition(ROTARYMIN / ROTARYSTEPS); newPos = ROTARYMIN; // Entonces el puntero saltará del máximo al mínimo. } #endif } Ok, funcionando Aquí en este código muestra con la configuración de RTC de FECHA-HORAS usando con la librería
- 7. void ImprimeFecha() { DateTime now = rtc.now(); // Consulta al RTC lcd.setCursor(0,0); // Fija el cursor en la primera línea lcd.print(DiaDeSemana[now.dayOfTheWeek()]); // Imprime el día de la semana lcd.setCursor(10,0); printDigits(now.day(), DEC); // Imprime el día lcd.print('/'); // Separador printDigits(now.month(), DEC); // Imprime el mes lcd.print('/'); // Separador lcd.print(now.year(), DEC); // Imprime el año } void ImprimeHora() { DateTime now = rtc.now(); // Consulta el RTC lcd.setCursor(13,1); // Fija cursor en 13,1 lcd.write(1); // Imprime el gráfico lcd.print(':'); printDigits(now.hour()); // Imprime hora lcd.print(':'); printDigits(now.minute()); // Imprime minuto MinActual = now.hour()*60+now.minute(); // Se actualiza la variable MinActual que será usada para encender y apagar las luces del acuario. Su valor va de 0 a 1439. } Otra forma que evita el problema de los días/meses/horas/minutos de 1 dígitos es esta. void ImprimeFecha() { char buffer[20]; DateTime now = rtc.now(); // Consulta al RTC lcd.setCursor(0,0); // Fija el cursor en la primera línea lcd.print(DiaDeSemana[now.dayOfTheWeek()]); // Imprime el día de la semana lcd.setCursor(10,0); sprintf(buffer,"%02d/%02d/%04d", now.day(), now.month(), now.year()); lcd.print(buffer); } void ImprimeHora() { char buffer[20]; DateTime now = rtc.now(); // Consulta el RTC lcd.setCursor(13,1); // Fija cursor en 13,1 lcd.write(1); // Imprime el gráfico sprintf(buffer,"%02d:%02d:%02d", now.hout(), now.minute(), now.second()); lcd.print(buffer);
- 8. MinActual = now.hour()*60+now.minute(); // Se actualiza la variable MinActual que será usada para encender y apagar las luces del acuario. Su valor va de 0 a 1439. } Pruebas con sensor temperatura DS18B20 La actualización de la información de corte de un cable demora aproximadamente 20seg al desconectar cable rojo muestra información diferente no el de falla La actualización de la información de temperatura demora aprox. 50 seg ver forma de bajar tiempo. Prueba de temperatura de RTC3231
- 9. Se toma temperatura ambiente y luego se acerca un cautín. La actualización de temperatura con demora El calefactor tiene que estar siempre encendido y trabajar así, si lo seteo a 25 grados se mantiene si sube se apaga si baja se enciende puede haber una variación de un grado, no entiendo porque en el día una temperatura, horas que esta encendido, noche otra temperatura, la idea es tener una temperatura pareja y que no por un cambio de temperatura los peces se enfermen Esta es la configuración para prueba donde el calefactor en este horario estará a 25° y el relé no se activa
- 10. Esta es la pantalla principal con la temperatura actual Estamos realizado la prueba y al conectar la señal del relé a negativo se activa, en ningún momento se activó ni con 9° ni con 60° que llego en un momento.
- 11. es lo mismo que tengo, la única forma que se activa el relé es si no dejo activa esta línea digitalWrite en el void setup pero no se desactiva el calefactor al pasar de los 26 o 35 o 65° void setup() { pinMode(SFetAzul, OUTPUT); pinMode(SFetRojo, OUTPUT); pinMode(SFetBlanco, OUTPUT); pinMode(Relay1, OUTPUT); // digitalWrite(Relay1, HIGH); // Subimos el pin a HIGH porque el relay se dispara con LOW pinMode(Relay2, OUTPUT); // digitalWrite(Relay2, HIGH); // Subimos el pin a HIGH porque el relay se dispara con LOW Pruebas memoria:
- 12. Se carga programa para blanquear la memoria luego se carga archivo CADUSA y se chequean valores guardados en calefactor por defecto correspondiendo a estos día 24° hora 09:00 a 21:40 noche 20° en el caso del CO2 datos aparecen como en la imagen no siendo legibles y no activando relé Se carga programa para blanquear la memoria luego se carga archivo CADUSA y se chequean valores En calefactor valores por defecto correspondiendo a estos día 24° hora 09:00 a 21:40 noche 20°. En el caso del CO2 valores por defecto hora 09:00 a 21:40. En ambos casos se visualiza correctamente al resetear y cortar la energía al modificar valor CO2 o Calefactor estos se guardan sin perderse Todo OK. CADUSA2 en prueba Se limpia la eeprom se carga CADUSA2 pantalla inicio OK pantalla información hora. Fecha, temperaturas OK menús: calefactor valores por defecto aparecen, funciona relé al activar ON OK fecha y hora Ok control CO2 se agrega read_but(); en líneas 482, 513, 531, 548, 566, al faltar solo mostraba ON OFF y no entrega información en pantalla de valores por defecto, al seleccionar ON u OFF aparece leyenda Hecho y sale del menú. Al borrar un símbolo! línea 476 if (!Co2Var.Status == 0)
- 13. aparece información por defecto y se activa rele en cada prueba se limpio eeprom se adjunta archivo con agregado de lineas faltantes y en estado original linea 476 para análisis Ya que estamos mostrado este era mi acuario de agua dulce de 170 cm de largo luego cambie al actual marino Actual en proceso
- 14. Se limpia la eeprom se carga CADUSA2 pantalla inicio OK pantalla información hora. Fecha, temperaturas OK menús: Reloj y fecha OK calefactor valores por defecto aparecen, relé se activa después de 1 minutos OK control CO2 entrega información en pantalla de valores por defecto, al seleccionar ON activa relé después de 1 minuto. se mantiene la configuración puesta por usuario al resetear y desconectar energía Prueba de sobre calentamiento a 72° mensaje Alta temperatura en pantalla y se reestablece bajo los 50° en cada prueba se limpió eeprom Lo otro hay posibilidad de agregar este control de temperatura en la parte del void overheating(), que se accione con el termómetro del rtc como una acción antes que la temperatura llegue al sobre calentamiento y mantener una temperatura y si falla pasaría al modo sobre calentamiento. El código a modificar para usar el sensor de temperatura del rtc. #include <Wire.h> #include <OneWire.h> //libreria temperatura #include <DallasTemperature.h> OneWire ourWire(12); // Se establece el pin D12 como bus OneWire DallasTemperature sensors(&ourWire); //Se declara una variable u objeto para nuestro sensor int PinVent = 5; //puerto digital D11 dodne conectar el ventildor int Temperatura; //variable calculo temperatura int Restriccion_de_Temp; //Variable para mapear la temperatura int pwm; //Variable para generar pwm void setup() { sensors.begin(); pinMode(5,OUTPUT); // Serial.begin(9600); } void loop() {
- 15. /////// Regulador Veloc Ventilador //////////// sensors.requestTemperatures(); Temperatura = (sensors.getTempCByIndex(0)); Restriccion_de_Temp = constrain(Temperatura, 35, 45); pwm = map(Restriccion_de_Temp, 35, 45, 0, 255); analogWrite(PinVent,pwm); // Serial.println(sensors.getTempCByIndex(0)); // Serial.println (pwm); delay(1000); } Una idea para la iluminación del display has probado con una resistencia de 10K donde está el jumper del lcd atenúa arto y es visible la información y no es molesto a la vista y solo ver que se apague la pantalla cuando termine el periodo de luz y seencienda cuando comience el periodo. Se ve mejor en vivo que en la foto Prueba de ventilador activándose a los 50° y desactivando a los 45 ...........OK prueba de atenuación iluminación y activación iluminación LCD .................OK en lo personal use resistencia de 10k Con la resistencia de 10k ilumina justo para que se vea y como dices a gusto del lector y se probó con un valor bajo y uno alto de resistencia. Se ve muy genial, esa era la idea, al mover el encoder recobra la iluminación genial. Lo único diferente indicador de dirección de menú ( > ) al cargar por primera vez, reiniciar o apagar y prender no aparece asta mover el encoder en la dirección de la flecha. OK, el cambio ( > ) funciona al cargar, reset y apagado y encendido
- 16. la (>) parte al cargar y al entrar a un menú y salir este no vuelve automáticamente línea 1182 se borra 35; se deja rtc.getTemperatura Prueba iluminación se pone horario modo sol finalizando 19:23 se apaga iluminación y modo luna enciende a las 19:25 según reloj RTC, demora de 1:59 seg según cronometro en encender, no es inmediato el paso a luna en modo mantenimiento se encienden solo luz azul y rojas solamente o las blancas igual, solo se me encienden las azul y rojas Consulta habría forma de poner en el LCD información del estado en que se está como: Amanecer, Sol, Atardecer, Noche Según horario programado a (>) parte al cargar el programa pero al entrar a un menú y salir esta (>) no vuelve automáticamente - Transición a modo Luna Si el horario sol finaliza a las 17:00 y luego dentro a menu luna y pongo que inicie a las 17:00 y finalice 18:00 salgo e ingreso nuevamente este cambia iniciando a las 17:01 provocando un lapso de casi 2 minutos con las luces apagadas y luego enciende luz azul, la transición debiese ser continua sin espacio apagado -----Creo que entendí el espacio sin luz es una transición a la salida de la luna El termino lo tome de la misma pagina " En el lenguaje común, al orto se le denomina amanecer, alba o aurora. En ocasiones se diferencia la aurora, que sería el primer resplandor del cielo, del amanecer, que correspondería a la salida del sol" mañana veré bien lo de las fases del día justo es este Alba, Luna y Ocaso me estan dando problemas sino dejare los básicos Noche, Amanecer, Sol, Atardecer y Luna que son los más significativos Sigue igual, para que vuelva el signo se tiene que mover (girar) el encoder avanzar y luego retroceder y aparece Test faces del día Noche OK Amanecer OK Sol OK Atardecer OK, se apagan las luces espera 2min y pasa a Sale luna Ocaso No aparece Sale luna OK Luna OK si es que modifique mi anterior circuito los 10v eran porque las fuentes MEANWELL necesitan un voltaje de referencia y las recomendaban, no los uso se quedo hay . los 8v alimento arduino. los relés que tengo son de 5v hay los uso. son Tip141 los tengo en uso en mi pantalla actual y son baratos en comparación al fet,
- 17. cuando vi precios no se en estos momentos. voy a usar tu recomendación del transistor para el ventilador. la fuente uso 5 de estas soportan hasta 18 led de 3w en serie, claro que estuve revisando y parece que la descontinuaron. Esta conversación sobre led es algo para largo algunos ven los watt otros los lumens otros el par led y nunca están de acuerdo yo opte luego de leer mucho por watt y lumens donde uso led con temp de color blanco calido 6000-6500k blanco frio 10000-15000k azul 460-470nm royal blue 445nm uv 420-425nm para un marino esta es mi pantalla cuando la estaba armando hace un año placa de aluminio 5mm de espesor algo gruesa y lentes de 90°
- 18. Dudas: 1- linea 235 es el tiempo de amanecer a sol, es de 30min la duracion definido en (+30) 2- en la linea 238 0,30,0,255 quiere decir que va a subir de 0min a 30min y la luz (pmw) iría aumentando de 0 a 255 según lo programado claro if (MinActual < (ModoSol.HoraInicio + 30)) { // Periodo Amanecer lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[1]); brillo = map((MinActual - ModoSol.HoraInicio),0,30,0,255);
- 19. No olvidar para la atenuación de la pantalla después de un minuto una resistencia entre 1k a 10k
- 22. Código #include <LiquidCrystal_I2C.h> // libreria para LCD por I2C #include <EEPROM.h> #include <RotaryEncoder.h> #include <OneButton.h> #include <RTClib.h> #include <OneWire.h> #include <DallasTemperature.h> #define enc_a A0 #define enc_b A1 #define enc_c A2 #define Relay1 7 #define Relay2 8 #define SFetAzul 9 #define SFetRojo 10 #define SFetBlanco 11 // Variables volatile byte enc_but; String Calendario[6] = {"A356o", "Mes", "Dia", "Hora", "Minuto", "Segundo"}; String NombreMeses[13] = {" ","Enero", "Febrero", "Marzo", "Abril", "Mayo", "Junio", "Julio", "Agosto", "Septiembre", "Octubre", "Noviembre","Diciembre"}; String DiaDeSemana[7] = {"Domingo", "Lunes", "Martes", "Miercoles", "Jueves", "Viernes", "Sabado"}; String Periodo_name[7] = {"Noche", "Amanecer", "Sol", "Atardecer", "Luna" , "Sale luna", "Ocaso"}; unsigned long previousMillis = 0; unsigned long backlightMillis = 0; unsigned long currentMillis; int lastPos = 1;
- 23. int newPos = 0; int MinActual = 0; byte brillo = 0; byte spwm[5]; float Temp; // Sensor DS18B20 para el agua del acuario float Tlamp; // Sensor interno del RTC para la temperatura del plafón. byte OverTemp = 65; // Límite superior de temeperatura para el artefato byte UnderTemp = 50; // Temperatura a la cual el artefacto retoma el funcionamiento. byte Mod_Menu = 0; byte arrow_symbol[8] = {B00000, B00100, B01110, B11111, B00100, B00100, B00100, B00100}; byte reloj_symbol[8] = {B00000, B01110, B10101, B10101, B10011, B10001, B01110, B00000}; // Símbolo reloj byte thermometer_symbol[8] = {B00100, B01010, B01010, B01110, B01110, B11111, B11111, B01110}; // Símbolo termómetro byte lamp_symbol[8] = {B00100, B10101, B01110, B11011, B01110, B10101, B00100, B00000}; // Símbolo lámpara struct MyTermo { byte Status; // Estado 0 apagado y 1 encendido byte TempHorario; // temepratura durante el rango de horas fijado byte TempResto; // temperatura para el horario fuera del rango int HoraInicio; // Hora inicio del rango int HoraFin; // Hora fin del rango }; MyTermo TermoVar; struct MyCo2 { byte Status; // Co2 On y Off, int HoraInicio; // Hora inicio int HoraFin; // Hora Fin
- 24. }; MyCo2 Co2Var; struct MyModeSun { // Modo Sol byte Azul; // Nivel salida rojo byte Rojo; // Nivel salida azul byte Blanco; // Nivel salida blanco int HoraInicio; // Hora inicio del rango int HoraFin; // Hora fin del rango }; MyModeSun ModoSol; struct MyModeMoon { // Modo Luna byte Status; // Estado apagado o encendido del modo luna byte Azul; // Nivel salida rojo byte Rojo; // Nivel salida azul byte Blanco; // Nivel salida blanco int HoraInicio; // Hora inicio del rango int HoraFin; // Hora fin del rango }; MyModeMoon ModoLuna; LiquidCrystal_I2C lcd (0x27, 20,4); // DIR, E, RW, RS, D4, D5, D6, D7 RTC_DS3231 rtc; // Se declara el reloj en tiempo real OneButton button(A2, true); // Botón del encoder puesto a la librería OneButton RotaryEncoder encoder(A1, A0); OneWire ourWire(12); //Se establece el pin 12 como bus OneWire DallasTemperature sensors(&ourWire); //Se declara una variable u objeto para nuestro sensor DeviceAddress outsideThermometer;
- 25. void setup() { lcd.init(); pinMode(SFetAzul, OUTPUT); pinMode(SFetRojo, OUTPUT); pinMode(SFetBlanco, OUTPUT); pinMode(Relay1, OUTPUT); digitalWrite(Relay1, HIGH); // Subimos el pin a HIGH porque el relay se dispara con LOW pinMode(Relay2, OUTPUT); digitalWrite(Relay2, HIGH); // Subimos el pin a HIGH porque el relay se dispara con LOW pinMode(enc_a, INPUT_PULLUP); pinMode(enc_b, INPUT_PULLUP); pinMode(enc_c, INPUT_PULLUP); pinMode(13, OUTPUT); // Pin 13 para controlar el cooler digitalWrite(13, LOW); // Iniciamos su estado en bajo. button.attachClick(clickbutton); button.setDebounceTicks(80); lcd.backlight(); lcd.createChar(0, arrow_symbol); lcd.createChar(1, reloj_symbol); lcd.createChar(2, thermometer_symbol); lcd.createChar(3, lamp_symbol); if (EEPROM.read(30)>1) { // Si es la primera vez que se inicia el programa graba los parámetros por defaul ModoSol.Azul=127; ModoSol.Rojo=127; ModoSol.Blanco=127; ModoSol.HoraInicio=540; ModoSol.HoraFin=1080; // Nivel de azul / Nivel de rojo / Nivel de blanco / HoraInicio a 9:00 hs / HoraFin 18:00 hs EEPROM.put(0,ModoSol); // guarda modo sol
- 26. TermoVar.Status=0; TermoVar.TempHorario=24; TermoVar.TempResto=20; TermoVar.HoraInicio=540; TermoVar.HoraFin=1300; // 0 Apagado, 1 Ecendido - 24° Por defecto / 20° por defecto / 540 minutos = 09:00 hs / 1300 minutos = 21:40 hs EEPROM.put(10, TermoVar); // guarda termostato ModoLuna.Status=0, ModoLuna.Azul=0; ModoLuna.Rojo=0; ModoLuna.Blanco=0; ModoLuna.HoraInicio=1140; ModoLuna.HoraFin=1380; //Apagado o Ecendido/ Nivel de azul/ Nivel de rojo/ Nivel de blanco/ HoraInicio a 19:00 hs / HoraFin 23:00 hs EEPROM.put(20,ModoLuna); // guarda modo luna Co2Var.Status = 0; Co2Var.HoraInicio = 540; Co2Var.HoraFin = 1300; // 0 Apagado, 1 Ecendido // 540 minutos o 09:00 AM // 1300 minutos = 21:40 hs EEPROM.put(30, Co2Var); // guarda control Co2 } EEPROM.get( 0, ModoSol ); EEPROM.get(10, TermoVar); EEPROM.get(20, ModoLuna); EEPROM.get(30, Co2Var ); lcd.setCursor(0, 0); lcd.print("Control de Acuario"); lcd.setCursor(6, 1); lcd.print("CADUSA"); lcd.setCursor(0,4); for( int i=0 ; i < 20 ; i++ ) { lcd.print("."); delay(150); } // delay(500); lcd.clear();
- 27. } void loop() { unsigned long currentMillis = millis(); button.tick(); LeeEncoder(0,7,1,1); // Lee el enconder de 0 a 7, de a 1 paso y con tope final. if (currentMillis % 6000 < 5) { // Si el resto de dividir currentMillis por 6000 da menos que 5... ImprimeFecha(); ImprimeHora(); ImprimeTemp(); if (currentMillis - backlightMillis > 60000) { lcd.setBacklight(LOW); } // Apaga el lcd a los 60s de inactividad } if (currentMillis % 3000 < 5) { Termostato(); ControlCo2(); } if (lastPos != newPos) { lcd.setCursor(0,3); switch (newPos) { case 0: lcd.print("> "); break; case 1: lcd.print("Modo Sol "); break; case 2: lcd.print("Modo Luna "); break; case 3: lcd.print("Calefactor "); break;
- 28. case 4: lcd.print("Control Co2 "); break; case 5: lcd.print("Mantener "); break; case 6: lcd.print("Fecha y Hora"); break; case 7: lcd.print("< "); break; } lastPos = newPos; Mod_Menu = newPos; } // Aquí el código para el control de la iluminación if (currentMillis % 7000 < 5) { // Cada 7 segundos /********* Modo SOL ***************** if (MinActual >= ModoSol.HoraInicio && MinActual <= ModoSol.HoraFin){ // Este es el rango de hora de Sol if (MinActual < (ModoSol.HoraInicio + 30)) { // Periodo Amanecer lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[1]); brillo = map((MinActual - ModoSol.HoraInicio),0,30,0,255); } if ((ModoSol.HoraInicio+30) < MinActual and (ModoSol.HoraFin-30) > MinActual ) { // Periodo pleno sol lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[2]);
- 29. if (brillo < 255) { lcd.clear(); lcd.setCursor(6,1); lcd.print("Subiendo"); newPos=0; lastPos=1;} while (brillo < 255) { brillo++; Set_pwmSol(); delay(25); if(brillo==255) {lcd.clear();} } } if (MinActual >= (ModoSol.HoraFin-30)) { // Periodo Atardecer lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[3]); brillo = map((ModoSol.HoraFin - MinActual),30,0,255,0) ; } Set_pwmSol(); } // Fin rango de hora de Sol /********* Modo LUNA *****************/ if (ModoLuna.Status == 1){ // Si el modo Luna está activado if (MinActual > ModoLuna.HoraInicio && MinActual < ModoLuna.HoraFin){ // Este es el rango de hora de Luna if (MinActual < (ModoLuna.HoraInicio+30)) { // Saliendo Luna lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[5]); brillo = map((MinActual - ModoLuna.HoraInicio),0,30,0,255); } if (MinActual > (ModoLuna.HoraInicio+31) and MinActual < (ModoLuna.HoraFin-31)) { // Luna plena lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[4]); if (brillo < 255) { lcd.clear(); lcd.setCursor(6,1); lcd.print("Subiendo");} while (brillo < 255) { brillo++; Set_pwmLuna(); delay(25);
- 30. if(brillo==255) {lcd.clear();} } } if (MinActual > (ModoLuna.HoraFin-30)) { // Ocultando Luna brillo = map((ModoLuna.HoraFin - MinActual),30,0,255,0); } Set_pwmLuna(); } // Fin rango de hora de Luna } // Fin si el modo Luna está activado /********* Periodos de Oscuridad *****************/ if (MinActual > ModoLuna.HoraFin or MinActual < ModoSol.HoraInicio){ // Periodo Noche lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[0]); if (brillo > 0) { lcd.clear(); lcd.setCursor(6,1); lcd.print("Apagando"); newPos=0; lastPos=1;} while (brillo > 0) { brillo--; Set_pwmNoche(); delay(25); if(brillo==0) {lcd.clear();} } } if (MinActual > ModoSol.HoraFin && MinActual < ModoLuna.HoraInicio){ // Periodo entre Sol y Luna lcd.setCursor(0,1); lcd.print(" "); lcd.setCursor(0,1); lcd.print(Periodo_name[6]); if (brillo > 0) { lcd.clear(); lcd.setCursor(6,1); lcd.print("Apagando");} while (brillo > 0) { brillo--; Set_pwmNoche(); delay(25); if(brillo==0) {lcd.clear();}
- 31. } } delay(5); } // Fin del código para el control de la iluminación } // FIN LOOP void clickbutton() { // Si se hace click porque en el loop esta: button.tick(); if (Mod_Menu > 0) { delay(100); switch (Mod_Menu) { // Según s hizo clik durante el menú que aparece en la pantalla principal del loop case 1: Set_Modo_Sol(); // Si Mod_Menu vale 1 entonces se ejecuta la función Set_Modo_Sol() y break detiene. break; case 2: Set_Modo_Luna(); break; case 3: Set_Calefactor(); break; case 4: Set_Co2(); break; case 5: Mantenimiento(); break; case 6:
- 32. setupTime(); break; } } } void LeeEncoder(int ROTARYMIN, int ROTARYMAX, int ROTARYSTEPS, int ROTARYTOPE ) { encoder.tick(); // Lee el encoder y actualiza el puntero. La librería lleva la cuenta desde 0. newPos = encoder.getPosition() * ROTARYSTEPS; // Asigna a newPos el puntero del encoder multiplicado por los pasos. if (newPos != lastPos) { // Enciende el display al mover el encoder lcd.setBacklight(HIGH); backlightMillis = millis(); } if (ROTARYTOPE == 1) { // Si el rotor tiene tope entonces no se pasa de valor if (newPos < ROTARYMIN) { // Solo si el puntero es menor a Valor Mínimo -> encoder.setPosition(ROTARYMIN / ROTARYSTEPS); // Se fija el puntero al valor mínimo por los pasos newPos = ROTARYMIN; } if (newPos > ROTARYMAX) { // Solo si el puntero es mayor a Valor Máximo -> encoder.setPosition(ROTARYMAX / ROTARYSTEPS); // Se fija el puntero al valor mínimo por los pasos newPos = ROTARYMAX; } }
- 33. if (ROTARYTOPE == 0) { // Si el rotor SI tiene tope entonces se pasa del valor máximo al mínimo y viceversa. if (newPos < ROTARYMIN) { // Solo si el puntero es menor a Valor Mínimo -> encoder.setPosition(ROTARYMAX / ROTARYSTEPS); newPos = ROTARYMAX; // Entonces el puntero saltará del mínimo al máximo } if (newPos > ROTARYMAX) { // Solo si el puntero es mayor al Valor Máximo -> encoder.setPosition(ROTARYMIN / ROTARYSTEPS); newPos = ROTARYMIN; // Entonces el puntero saltará del máximo al mínimo. } } } void read_but() // Función que devuele enc_but = 1 al soltar el botón del encoder. { bool pin_status; delay(5); pin_status = digitalRead(enc_c); //Se asigna a pin_status el valor del botón if (pin_status == LOW && enc_but != 128) { // Si esta pulsado y enc_but no vale 128 enc_but = 128; // Ahora enc_but si vale 128 } if (pin_status == HIGH && enc_but == 128) { // Si enc_but que ahora vale 128 y se suelta el pulsador enc_but = 1; // ahora enc_but vale 1; } }
- 34. void Set_Modo_Sol(){ int salir=1; int x=0; int hh1 = ModoSol.HoraInicio/60; int mm1 = ModoSol.HoraInicio - (hh1*60); int hh2 = ModoSol.HoraFin/60; int mm2 = ModoSol.HoraFin - (hh2*60); lcd.clear(); lcd.setCursor(0,0); lcd.print("M-Sol"); lcd.setCursor(1,1); printDigits(hh1);lcd.print(":"); printDigits(mm1);lcd.print("hs"); lcd.setCursor(1,3); printDigits(hh2);lcd.print(":"); printDigits(mm2);lcd.print("hs"); lcd.setCursor(3,2); lcd.print("a"); lcd.setCursor(9,0); lcd.print("Azul :"); lcd.print(map(ModoSol.Azul,255,0,100,0)); lcd.print("%"); lcd.setCursor(9,1); lcd.print("Rojo :"); lcd.print(map(ModoSol.Rojo,255,0,100,0)); lcd.print("%"); lcd.setCursor(9,2); lcd.print("Blanco:"); lcd.print(map(ModoSol.Blanco,255,0,100,0)); lcd.print("%"); lcd.setCursor(6,0);
- 35. lcd.write(1); lcd.setCursor(5,0); lcd.blink(); encoder.setPosition(1); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(0,1,1,0); if (lastPos != newPos){ lastPos = newPos ; salir = newPos ; lcd.setCursor(6,0); lcd.write(salir); lcd.setCursor(5,0); } read_but(); } enc_but=0; if (salir == 0) {goto setsolout ;} lcd.setCursor(0,1); encoder.setPosition(hh1); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(5,(hh2-6),1,1); if (lastPos != newPos){ lastPos = newPos ; hh1 = newPos ; lcd.setCursor(1,1); lcd.print(" "); lcd.setCursor(1,1); printDigits(hh1); lcd.setCursor(0,1); }
- 36. read_but(); } enc_but=0; lcd.setCursor(3,1); encoder.setPosition(mm1); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm1 = newPos ; lcd.setCursor(4,1); lcd.print(" "); lcd.setCursor(4,1); printDigits(mm1); lcd.setCursor(3,1); } read_but(); } enc_but=0; lcd.setCursor(0,3); encoder.setPosition(hh2); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder((hh1+6),21,1,1);// aca modifico duracion periodo 6hrs , horari fin luz 21hrs if (lastPos != newPos){ lastPos = newPos ; hh2 = newPos ; lcd.setCursor(1,3); lcd.print(" "); lcd.setCursor(1,3); printDigits(hh2); lcd.setCursor(0,3);
- 37. } read_but(); } enc_but=0; lcd.setCursor(3,3); encoder.setPosition(mm2); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm2 = newPos ; lcd.setCursor(4,3); lcd.print(" "); lcd.setCursor(4,4); printDigits(mm2); lcd.setCursor(3,4); } read_but(); } enc_but=0; encoder.setPosition(map(ModoSol.Azul,0,256,0,21)); delay(250); lastPos = newPos ; lcd.setCursor(15,0); brillo=255; Set_pwmSol();
- 38. while (enc_but!=1) { LeeEncoder(0,100,5,1); if (lastPos != newPos){ lastPos = newPos; ModoSol.Azul = map(newPos,0,100,0,255); lcd.setCursor(16,0); lcd.print(" "); lcd.setCursor(16,0); lcd.print(newPos); lcd.print("%"); lcd.setCursor(15,0); analogWrite(SFetAzul,ModoSol.Azul); } read_but(); } enc_but=0; encoder.setPosition(map(ModoSol.Rojo,0,256,0,21)); lastPos = newPos ; delay(250); lcd.setCursor(15,1); while (enc_but!=1) { LeeEncoder(0,100,5,1); if (lastPos != newPos){ lastPos = newPos ; ModoSol.Rojo = map(newPos,0,100,0,255); lcd.setCursor(16,1); lcd.print(" "); lcd.setCursor(16,1); lcd.print(newPos); lcd.print("%"); lcd.setCursor(15,1); analogWrite(SFetRojo,ModoSol.Rojo); } read_but(); } enc_but=0; encoder.setPosition(map(ModoSol.Blanco,0,256,0,21)); lastPos = newPos ;
- 39. delay(250); lcd.setCursor(15,2); while (enc_but!=1) { LeeEncoder(0,100,5,1); if (lastPos != newPos){ lastPos = newPos ; ModoSol.Blanco = map(newPos,0,100,0,255); lcd.setCursor(16,2); lcd.print(" "); lcd.setCursor(16,2); lcd.print(newPos); lcd.print("%"); lcd.setCursor(15,2); analogWrite(SFetBlanco,ModoSol.Blanco); } read_but(); } enc_but=0; ModoSol.HoraInicio = (hh1*60) + mm1; ModoSol.HoraFin = (hh2*60) + mm2; EEPROM.put(0, ModoSol); if (ModoSol.HoraFin > ModoLuna.HoraInicio) { ModoLuna.HoraInicio = (hh2*60) + mm2 + 1; EEPROM.put(20, ModoLuna); } setsolout: Hecho(); } void Set_Modo_Luna(){
- 40. int hh1 = ModoLuna.HoraInicio/60; int mm1 = ModoLuna.HoraInicio - (hh1*60); int hh2 = ModoLuna.HoraFin/60; int mm2 = ModoLuna.HoraFin - (hh2*60); int hh3 = ModoSol.HoraFin/60; int mm3 = ModoSol.HoraFin - (hh1*60); lcd.clear(); lcd.setCursor(0,0); lcd.print("Luna"); lcd.setCursor(6,0); if (ModoLuna.Status == 0) {lcd.print("Off");} if (ModoLuna.Status == 1) {lcd.print("On ");} lcd.blink(); lcd.setCursor(5,0); encoder.setPosition(ModoLuna.Status); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(0,1,1,0); if (lastPos != newPos){ lastPos = newPos ; ModoLuna.Status = newPos; lcd.setCursor(6,0); lcd.print(" "); lcd.setCursor(6,0); if (ModoLuna.Status == 0) { lcd.print("Off");} if (ModoLuna.Status == 1) { lcd.print("On ");} lcd.setCursor(5,0); } read_but();
- 41. } enc_but=0; if (ModoLuna.Status == 0) { goto setlunaout; } // Si apaga Modo Luna interrumpe el resto y dirige a grabar lcd.setCursor(1,1); printDigits(hh1);lcd.print(":"); printDigits(mm1);lcd.print("hs"); lcd.setCursor(1,3); printDigits(hh2);lcd.print(":"); printDigits(mm2);lcd.print("hs"); lcd.setCursor(3,2); lcd.print("a"); lcd.setCursor(9,0); lcd.print("Azul :"); printDigits(map(ModoLuna.Azul,255,0,100,0)); lcd.print("%"); lcd.setCursor(9,1); lcd.print("Rojo :"); printDigits(map(ModoLuna.Rojo,255,0,100,0)); lcd.print("%"); lcd.setCursor(9,2); lcd.print("Blanco:"); printDigits(map(ModoLuna.Blanco,255,0,100,0)); lcd.print("%"); lcd.setCursor(0,1); lcd.blink(); encoder.setPosition(hh1); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(hh3,23,1,1); if (lastPos != newPos){
- 42. lastPos = newPos ; hh1 = newPos ; lcd.setCursor(1,1); lcd.print(" "); lcd.setCursor(1,1); printDigits(hh1); lcd.setCursor(0,1); } read_but(); } enc_but=0; lcd.setCursor(3,1); encoder.setPosition(mm1); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm1 = newPos ; if ((hh1 == hh3) && (mm1 <= mm3)) { mm1 = mm3+1; encoder.setPosition(mm1);} lcd.setCursor(4,1); lcd.print(" "); lcd.setCursor(4,1); printDigits(mm1); lcd.setCursor(3,1); } read_but(); } enc_but=0; lcd.setCursor(0,3); encoder.setPosition(hh2); delay(250); lastPos = newPos ;
- 43. while (enc_but!=1) { LeeEncoder((hh1+2),23,1,1); if (lastPos != newPos){ lastPos = newPos ; hh2 = newPos ; lcd.setCursor(1,3); lcd.print(" "); lcd.setCursor(1,3); printDigits(hh2); lcd.setCursor(0,3); } read_but(); } enc_but=0; lcd.setCursor(3,3); encoder.setPosition(mm2); delay(250); lastPos = newPos ; while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm2 = newPos ; lcd.setCursor(4,3); lcd.print(" "); lcd.setCursor(4,4); printDigits(mm2); lcd.setCursor(3,4); } read_but(); } enc_but=0; encoder.setPosition(map(ModoLuna.Azul,0,256,0,21)); lastPos = newPos ; delay(250); lcd.setCursor(15,0);
- 44. brillo=255; Set_pwmLuna(); while (enc_but!=1) { LeeEncoder(0,50,5,1); if (lastPos != newPos){ lastPos = newPos; ModoLuna.Azul = map(newPos,0,100,0,255); lcd.setCursor(16,0); lcd.print(" "); lcd.setCursor(16,0); printDigits(newPos); lcd.print("%"); lcd.setCursor(15,0); analogWrite(SFetAzul,ModoLuna.Azul); } read_but(); } enc_but=0; encoder.setPosition(map(ModoLuna.Rojo,0,256,0,21)); lastPos = newPos ; delay(250); lcd.setCursor(15,1); while (enc_but!=1) { LeeEncoder(0,20,5,1); if (lastPos != newPos){ lastPos = newPos; ModoLuna.Rojo = map(newPos,0,100,0,255); lcd.setCursor(16,1); lcd.print(" "); lcd.setCursor(16,1); printDigits(newPos); lcd.print("%"); lcd.setCursor(15,1); analogWrite(SFetRojo,ModoLuna.Rojo); } read_but(); } enc_but=0;
- 45. encoder.setPosition(map(ModoLuna.Blanco,0,256,0,21)); delay(250); lastPos = newPos ; lcd.setCursor(15,2); while (enc_but!=1) { LeeEncoder(0,50,5,1); if (lastPos != newPos){ lastPos = newPos; ModoLuna.Blanco = map(newPos,0,100,0,255); lcd.setCursor(16,2); lcd.print(" "); lcd.setCursor(16,2); printDigits(newPos); lcd.print("%"); lcd.setCursor(15,2); analogWrite(SFetBlanco,ModoLuna.Blanco); } read_but(); } enc_but=0; setlunaout: ModoLuna.HoraInicio = (hh1*60) + mm1; ModoLuna.HoraFin = (hh2*60) + mm2; EEPROM.put(20, ModoLuna); Hecho(); } void Set_Calefactor() { // Creamos 4 variales temporales para horas y minutos int hh1 = TermoVar.HoraInicio/60; // Obtener las horas de TermoVar.HoraInicio
- 46. int mm1 = TermoVar.HoraInicio%60; // Obtener los minutos de TermoVar.HoraInicio int hh2 = TermoVar.HoraFin/60; // Obterner las horas de TermoVar.HoraFin int mm2 = TermoVar.HoraFin%60; // Obetener los minutos de TermoVar.HoraFin lcd.clear(); lcd.setCursor(0,0); lcd.print("Calefactor"); lcd.setCursor(14,0); if (!TermoVar.Status) lcd.print("Off"); else lcd.print("On "); lcd.setCursor(13,0); lcd.blink(); encoder.setPosition(TermoVar.Status); lastPos = newPos ; delay(250); while (enc_but!=1) { // Ciclo ON OFF del termostato LeeEncoder(0,1,1,1); // Lee el enconder de 0 a 1 if (lastPos != newPos) { // Si se gira el encoder, entonces... lastPos = newPos ; // Vovemos a igualar lastPos TermoVar.Status = newPos; // Fijamos TermoVar.Status al nuevo valor,0 o 1. lcd.setCursor(14,0); if (!TermoVar.Status) lcd.print("Off"); else lcd.print("On "); lcd.setCursor(13,0); }
- 47. read_but(); // Lee si opromimos el botón del encoder y enc_but pasa a valor 1. } // Fin Ciclo ON OFF del termostato enc_but=0; // Habiendo opromido el encoder se sale del while y volvemos a poner a enc_but en valor 0. if (!TermoVar.Status) { // Si TermoVar.Status quedó en Off interrumpe el resto y dirige hacia la etiqueta setout goto setout; } lcd.setCursor(0,1); lcd.print("Dia: "); lcd.print(TermoVar.TempHorario);lcd.print("337"); lcd.setCursor(3,1); encoder.setPosition(TermoVar.TempHorario); lastPos = newPos; delay(250); while (enc_but!=1) { // Ciclo fija temperatura durante el día LeeEncoder(10,34,1,1); // Cambiar aquí si se necesita una temperatura inferior a 10 o superior a 34. if (lastPos != newPos){ lastPos = newPos ; TermoVar.TempHorario = newPos; lcd.setCursor(5,1); lcd.print(" "); lcd.setCursor(5,1); lcd.print(TermoVar.TempHorario); lcd.print("337"); lcd.setCursor(3,1); if (TermoVar.TempResto > TermoVar.TempHorario) TermoVar.TempResto = TermoVar.TempHorario;
- 48. } read_but(); } enc_but=0; // Fin Ciclo fija temperatura durante el día lcd.setCursor(0,2); lcd.print("Hora: "); printDigits(hh1); lcd.print(":"); printDigits(mm1); lcd.print(" a "); printDigits(hh2); lcd.print(":"); printDigits(mm2); lcd.setCursor(5,2); encoder.setPosition(hh1); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder(0,(hh2-1),1,1); if (lastPos != newPos) { lastPos = newPos ; hh1 = newPos; lcd.setCursor(6,2); lcd.print(" "); lcd.setCursor(6,2); printDigits(hh1); lcd.setCursor(5,2); }
- 49. read_but(); } enc_but=0; lcd.setCursor(8,2); encoder.setPosition(mm1); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm1 = newPos; lcd.setCursor(9,2); lcd.print(" "); lcd.setCursor(9,2); printDigits(mm1); lcd.setCursor(8,2); } read_but(); } enc_but=0; lcd.setCursor(13,2); encoder.setPosition(hh2); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder((hh1+1),23,1,1); if (lastPos != newPos) {
- 50. lastPos = newPos ; hh2 = newPos; lcd.setCursor(14,2); lcd.print(" "); lcd.setCursor(14,2); printDigits(hh2); lcd.setCursor(13,2); } read_but(); } enc_but=0; lcd.setCursor(16,2); encoder.setPosition(mm2); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm2 = newPos; lcd.setCursor(17,2); lcd.print(" "); lcd.setCursor(17,2); printDigits(mm2);lcd.setCursor(16,2); } read_but(); } enc_but=0; lcd.setCursor(0,3); lcd.print("Noche: "); lcd.print(TermoVar.TempResto); lcd.print("337"); lcd.setCursor(5,3);
- 51. encoder.setPosition(TermoVar.TempResto); lastPos = newPos; delay(250); while (enc_but!=1) { LeeEncoder(10,TermoVar.TempHorario,1,1); if (lastPos != newPos){ lastPos = newPos ; TermoVar.TempResto = newPos; lcd.setCursor(7,3); lcd.print(" "); lcd.setCursor(7,3); lcd.print(TermoVar.TempResto); lcd.print("337"); lcd.setCursor(5,3); } read_but(); } enc_but=0; setout: TermoVar.HoraInicio = (hh1*60) + mm1; TermoVar.HoraFin = (hh2*60) + mm2; EEPROM.put(10, TermoVar); if (!TermoVar.Status) { digitalWrite(Relay1, HIGH);} Hecho(); }
- 52. void Set_Co2() { // Creamos 4 variales temporales para horas y minutos int hh1 = Co2Var.HoraInicio/60; // Obtener las horas de Co2Var.HoraInicio int mm1 = Co2Var.HoraInicio%60; // Obtener los minutos de Co2Var.HoraInicio int hh2 = Co2Var.HoraFin/60; // Obterner las horas de Co2Var.HoraFin int mm2 = Co2Var.HoraFin%60; // Obetener los minutos de Co2Var.HoraFin lcd.clear(); lcd.setCursor(0,0); lcd.print("Control Co2"); lcd.setCursor(14,0); if (Co2Var.Status == 0) lcd.print("Off"); if (Co2Var.Status == 1) lcd.print("On "); lcd.setCursor(13,0); lcd.blink(); encoder.setPosition(Co2Var.Status); lastPos = newPos ; delay(250); while (enc_but!=1) { // Ciclo ON OFF del control Co2 LeeEncoder(0,1,1,1); if (lastPos != newPos) { lastPos = newPos ; Co2Var.Status = newPos; lcd.setCursor(14,0); if (Co2Var.Status == 0) lcd.print("Off"); else lcd.print("On "); lcd.setCursor(13,0); } read_but();
- 53. } enc_but=0; // Fin Ciclo ON OFF del control Co2 if (!Co2Var.Status) { goto set2out; } // Si apaga el Co2 interrumpe el resto y dirige a grabar lcd.setCursor(0,2); lcd.print("Hora: "); printDigits(hh1); lcd.print(":"); printDigits(mm1); lcd.print(" a "); printDigits(hh2); lcd.print(":"); printDigits(mm2); lcd.setCursor(5,2); encoder.setPosition(hh1); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder(0,(hh2-1),1,1); if (lastPos != newPos){ lastPos = newPos ; hh1 = newPos; lcd.setCursor(6,2); lcd.print(" "); lcd.setCursor(6,2); printDigits(hh1); lcd.setCursor(5,2); }
- 54. read_but(); } enc_but=0; lcd.setCursor(8,2); encoder.setPosition(mm1); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm1 = newPos; lcd.setCursor(9,2); lcd.print(" "); lcd.setCursor(9,2); printDigits(mm1); lcd.setCursor(8,2); } read_but(); } enc_but=0; lcd.setCursor(13,2); encoder.setPosition(hh2); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder((hh1+1),23,1,1); if (lastPos != newPos) { lastPos = newPos ;
- 55. hh2 = newPos; lcd.setCursor(14,2); lcd.print(" "); lcd.setCursor(14,2); printDigits(hh2); lcd.setCursor(13,2); } read_but(); } enc_but=0; lcd.setCursor(16,2); encoder.setPosition(mm2); lastPos = newPos ; delay(250); while (enc_but!=1) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; mm2 = newPos; lcd.setCursor(17,2); lcd.print(" "); lcd.setCursor(17,2); printDigits(mm2); lcd.setCursor(16,2); } read_but(); } enc_but=0;
- 56. set2out: Co2Var.HoraInicio = (hh1*60) + mm1; Co2Var.HoraFin = (hh2*60) + mm2; EEPROM.put(30, Co2Var); Hecho(); } void Mantenimiento(){ lcd.clear(); lcd.setCursor(0,0); lcd.print("Mantenimiento"); lcd.setCursor(0,4); lcd.print("Clic para salir."); encoder.setPosition(0); LeeEncoder(0,100,5,0); delay(250); lcd.setCursor(5,1); lcd.print("Luz: "); while (enc_but!=1) { LeeEncoder(0,100,5,1); if (lastPos != newPos){ lastPos = newPos ; for( int a =1; a<3; a++) { spwm[a] = map(newPos,0,100,0,255); } lcd.setCursor(10,1); lcd.print(" "); lcd.setCursor(10,1); printDigits(newPos); lcd.print("%"); Set_pwm(); } read_but(); } enc_but=0;
- 57. Hecho(); } void setupTime(){ int set_time[6]; DateTime now = rtc.now(); set_time[0] = now.year() ; set_time[1] = now.month() ; set_time[2] = now.day() ; set_time[3] = now.hour() ; set_time[4] = now.minute() ; set_time[5] = now.second() ; lcd.clear(); lcd.setCursor(0, 0); lcd.print("Ajuste Fecha / Hora"); for(int i=0;i<6;i++) { lcd.setCursor(0,2);lcd.print(Calendario[i]); lcd.setCursor(8,2);lcd.print(" "); delay(50); encoder.setPosition(set_time[i]); lcd.setCursor(8,2); printDigits(set_time[i]); while(enc_but!=1 && i == 0) { LeeEncoder(2018,2050,1,0); if (lastPos != newPos){ lastPos = newPos ; set_time[i] = newPos ; lcd.setCursor(8, 2);lcd.print(" "); lcd.setCursor(8, 2);lcd.print(set_time[i]);}
- 58. read_but(); } enc_but=0; delay(50); while(enc_but!=1 && i==1) { LeeEncoder(1,12,1,0); if (lastPos != newPos){ lastPos = newPos ;set_time[i] = newPos ; lcd.setCursor(8, 2);lcd.print(" "); lcd.setCursor(8, 2);lcd.print(NombreMeses[newPos]); } read_but(); } enc_but=0; delay(50); while(enc_but!=1 && i==2) { LeeEncoder(1,31,1,0); if (lastPos != newPos){ lastPos = newPos ;set_time[i] = newPos ; lcd.setCursor(8, 2); lcd.print(" "); lcd.setCursor(8, 2); printDigits(set_time[i]); } read_but(); } enc_but=0; delay(50); while(enc_but!=1 && i==3) {
- 59. LeeEncoder(0,23,1,0); if (lastPos != newPos){ lastPos = newPos ;set_time[i] = newPos ; lcd.setCursor(8, 2);lcd.print(" "); lcd.setCursor(8, 2);printDigits(set_time[i]); } read_but(); } enc_but=0; delay(50); while(enc_but!=1 && i==4) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; set_time[i] = newPos ; lcd.setCursor(8, 2);lcd.print(" "); lcd.setCursor(8, 2);printDigits(set_time[i]); } read_but(); } enc_but=0; delay(50); while(enc_but!=1 && i==5) { LeeEncoder(0,59,1,0); if (lastPos != newPos){ lastPos = newPos ; set_time[i] = newPos ; lcd.setCursor(8, 2);
- 60. lcd.print(" "); lcd.setCursor(8, 2); printDigits(set_time[i]); } read_but(); } enc_but=0; } rtc.adjust(DateTime(set_time[0],set_time[1],set_time[2],set_time[3] ,set_time[4], set_time[5])); Hecho(); } void printDigits(int digits) { // Esta función agrega un cero a dígitos menores a 10 if(digits < 10){ lcd.print('0'); } lcd.print(digits); } void RefreshLCD() { ImprimeFecha(); delay(50); ImprimeHora(); delay(50); ImprimeTemp(); delay(50); }
- 61. void ImprimeTemp() { if (sensors.getAddress(outsideThermometer, 0)) { // Si hay comunicación con el sensor DS18B20 sensors.requestTemperatures(); //Se envía el comando para leer la temperatura Temp= sensors.getTempCByIndex(0); //Se obtiene la temperatura en ºC lcd.setCursor(13,2); lcd.write(2); // Imprime el símbolo termómetro lcd.print(":"); if (Temp < 10) { lcd.print(' '); } // Si la temperatura es menor de 10 deja un espacio en blanco lcd.print(Temp,1); // Imprime la temperatura del DS18B20 con un decimal. lcd.print("337"); // Imprime ° } else { // Si no hay comunicación con el sensor porque se ha cortado el cable, etc. lcd.setCursor(13,2); lcd.write(2); // Imprime el símbolo termómetro lcd.print(":Falla"); // Comunica la falla del sensor } Tlamp = rtc.getTemperature(); // Asigna a Tlamp la temperatura del RTC lcd.setCursor(13,3); lcd.write(3); // Imprime el símbolo lámpara lcd.print(":"); if (Tlamp < 10) { lcd.print(' ');} // Si la temperatura es menor de 10 deja un espacio en blanco lcd.print(Tlamp,1); // Imprime la temperatura del RTC con un decimal. lcd.print("337"); // Imprime °
- 62. if (Tlamp > UnderTemp) { digitalWrite(13, HIGH); } // Activa el cooler a los 50° if (Tlamp < UnderTemp-5) { digitalWrite(13, LOW); } // Lo apaga a los 45° if (Tlamp > OverTemp){ overheating(); } // Si la temperatura es mayor a OverTemp llama a la función overheating } void MideTemperatura() { sensors.requestTemperatures(); //Se envía el comando para leer la temperatura Temp = sensors.getTempCByIndex(0); //Se asigna a la variable Temp, la temperatura en ºC del sensor ds18B20 Tlamp = rtc.getTemperature(); // Se asigna a la variable Tlamp la temperatura del RTC } void ImprimeFecha() { DateTime now = rtc.now(); // Consulta al RTC lcd.setCursor(0,0); // Fija el cursor en la primera línea lcd.print(DiaDeSemana[now.dayOfTheWeek()]); // Imprime el día de la semana lcd.setCursor(10,0); printDigits(now.day()); // Imprime el día lcd.print('/'); // Separador printDigits(now.month()); // Imprime el mes lcd.print('/'); // Separador
- 63. lcd.print(now.year(), DEC); // Imprime el año } void ImprimeHora() { DateTime now = rtc.now(); // Consulta el RTC lcd.setCursor(13,1); // Fija cursor en 13,1 lcd.write(1); // Imprime el gráfico lcd.print(':'); printDigits(now.hour()); // Imprime hora lcd.print(':'); printDigits(now.minute()); // Imprime minuto MinActual = now.hour()*60+now.minute(); // Se actualiza la variable MinActual que será usada para encender y apagar las luces del acuario. Su valor va de 0 a 1439. } void Hecho() { currentMillis = millis(); previousMillis = millis(); lcd.setBacklight(HIGH); encoder.setPosition(0); delay(100); newPos = 0; Mod_Menu = newPos; lastPos = 1; lcd.noBlink(); lcd.clear(); lcd.setCursor(6, 1); lcd.print("Hecho !!");
- 64. delay(2000); lcd.clear(); RefreshLCD(); } void overheating() { analogWrite(SFetAzul,0); analogWrite(SFetRojo,0); analogWrite(SFetBlanco,0); byte cursor=20; lcd.clear(); lcd.setBacklight(HIGH); lcd.setCursor(0, 0); lcd.print("Alta Temperatura!!"); lcd.setCursor(0,3); lcd.print("3773773773773773773773773773773773773773773773 77377377377377"); // Imprime relleno while (Tlamp > UnderTemp) { // Entra en un ciclo mientras la temperatura sea excesiva. MideTemperatura(); // Mide ambas temperaturas Termostato(); // Corrobora el termostato para el calefactor ControlCo2(); // Comprueba si el Co2 debe estar activo lcd.setCursor(7, 1); lcd.print(Tlamp,2); lcd.print("337"); // Imprime °
- 65. delay(1000); cursor--; lcd.setCursor(cursor,3); lcd.print("376"); // Imprime en Blanco if (cursor ==0) {cursor =20; delay(1000); lcd.setCursor(0,3); lcd.print("3773773773773773773773773773773773773773773773 77377377377377"); } } // Sale del ciclo de alta temperatura lcd.clear(); // Limpia la pantalla RefreshLCD(); // Actualiza el lcd con los datos normales. } void Termostato(){ if (TermoVar.Status) { // Si el termostato esta encendido if ((MinActual >= TermoVar.HoraInicio) && (MinActual <= TermoVar.HoraFin)) { // Rango de hora de día if (Temp < TermoVar.TempHorario) { digitalWrite(Relay1, LOW); } else { digitalWrite(Relay1, HIGH); } } else if (Temp < TermoVar.TempResto) { digitalWrite(Relay1, LOW); } else { digitalWrite(Relay1, HIGH);
- 66. } } if (!TermoVar.Status) digitalWrite(Relay1, HIGH); delay(5); } void ControlCo2(){ if (Co2Var.Status == 1) { // Si el termostato esta encendido if ((MinActual >= Co2Var.HoraInicio) && (MinActual <= Co2Var.HoraFin)) { // Rango de hora de día digitalWrite(Relay2, LOW); } else { digitalWrite(Relay2, HIGH); } // Apagado para el resto del día } if (Co2Var.Status == 0) { digitalWrite(Relay2, HIGH); } // Apagado para Co2 Off delay(5); } void Set_pwm(){ analogWrite(SFetAzul, spwm[1]); analogWrite(SFetRojo, spwm[2]); analogWrite(SFetBlanco, spwm[3]); }
- 67. void Set_pwmSol(){ spwm[1]= map(ModoSol.Azul , 0, 255, 0, brillo); spwm[2]= map(ModoSol.Rojo , 0, 255, 0, brillo); spwm[3]= map(ModoSol.Blanco, 0, 255, 0, brillo); Set_pwm(); } void Set_pwmLuna(){ spwm[1]= map(ModoLuna.Azul , 0, 255, 0, brillo); spwm[2]= map(ModoLuna.Rojo , 0, 255, 0, brillo); spwm[3]= map(ModoLuna.Blanco, 0, 255, 0, brillo); Set_pwm(); } void Set_pwmNoche(){ spwm[1]= map(spwm[1], 0, 255, 0, brillo); spwm[2]= map(spwm[2], 0, 255, 0, brillo); spwm[3]= map(spwm[3], 0, 255, 0, brillo); Set_pwm(); } Diagrama de flujo