
Recommandé
Contenu connexe
En vedette
En vedette (20)
Fiche Presentationnew12
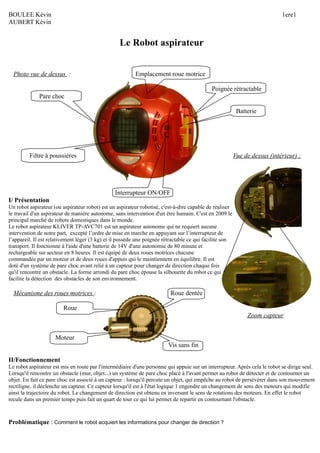
- 1. BOULEE Kévin 1ere1 AUBERT Kévin Le Robot aspirateur Photo vue de dessus : Emplacement roue motrice Poignée rétractable Pare choc Batterie Filtre à poussières Vue de dessus (intérieur) : Interrupteur ON/OFF I/ Présentation Un robot aspirateur (ou aspirateur robot) est un aspirateur robotisé, c'est-à-dire capable de réaliser le travail d'un aspirateur de manière autonome, sans intervention d'un être humain. C'est en 2009 le principal marché de robots domestiques dans le monde. Le robot aspirateur KLIVER TP-AVC701 est un aspirateur autonome qui ne requiert aucune intervention de notre part, excepté l’ordre de mise en marche en appuyant sur l’interrupteur de l’appareil. Il est relativement léger (3 kg) et il possède une poignée rétractable ce qui facilite son transport. Il fonctionne à l'aide d'une batterie de 14V d'une autonomie de 80 minute et rechargeable sur secteur en 8 heures. Il est équipé de deux roues motrices chacune commandée par un moteur et de deux roues d'appuis qui le maintiennent en équilibre. Il est doté d'un système de pare choc avant relié à un capteur pour changer de direction chaque fois qu'il rencontre un obstacle. La forme arrondi du pare choc épouse la silhouette du robot ce qui facilite la détection des obstacles de son environnement. Mécanisme des roues motrices : Roue dentée Roue Zoom capteur Moteur Vis sans fin II/Fonctionnement Le robot aspirateur est mis en route par l'intermédiaire d'une personne qui appuie sur un interrupteur. Après cela le robot se dirige seul. Lorsqu'il rencontre un obstacle (mur, objet...) un système de pare choc placé à l'avant permet au robot de détecter et de contourner un objet. En fait ce pare choc est associé à un capteur : lorsqu'il percute un objet, qui empêche au robot de persévérer dans son mouvement rectiligne, il déclenche un capteur. Ce capteur lorsqu'il est à l'état logique 1 engendre un changement de sens des moteurs qui modifie ainsi la trajectoire du robot. Le changement de direction est obtenu en inversant le sens de rotations des moteurs. En effet le robot recule dans un premier temps puis fait un quart de tour ce qui lui permet de repartir en contournant l'obstacle. Problématique : Comment le robot acquiert les informations pour changer de direction ?