
Recommandé
Recommandé
Contenu connexe
En vedette
En vedette (20)
Presentation Amsa 6.pptx
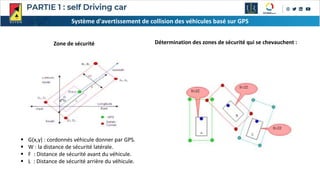
- 1. G(x,y) : cordonnés véhicule donner par GPS. W : la distance de sécurité latérale. F : Distance de sécurité avant du véhicule. L : Distance de sécurité arrière du véhicule. Détermination des zones de sécurité qui se chevauchent : Système d'avertissement de collision des véhicules basé sur GPS Zone de sécurité
- 2. Localisation de voiture : latitude et longitude (GPS) Calcule de zone de sécurité : les points ( A1,B1,C1,D1) Vérifier si: (A1,B1,C1,D1) C (A2B2C2D2) Voiture 2 Localisation de voiture : latitude et longitude (GPS) Calcule de zone de sécurité : les points ( A2,B2,C2,D2) Vérifier si: (A2,B2,C2,D2) C (A1B1C1D1) Voiture 1 Algorithme d'avertissement de collision Fonctionnement normale Fonctionnement normale Action : Activer une alerte Arrêter la voiture Si Oui Si Non Si Non Système d'avertissement de collision des véhicules basé sur GPS
- 3. 1- Données à communiquées 2- Protocol de communication 3- Processus de communication Plan
- 4. Localisation de voiture : latitude te longitude État de batterie : Tension, Courant, Puissance Zone de sécurité : les point des cotes A B C D 1. Les données communiquées
- 5. ESP NOW : ESP NOW architecture 2. Protocol de communication ESP NOW Envoyer à l’adresse MAC 2 ESP NOW Envoyer à l’adresse MAC 1 MAC 1 MAC 2
- 6. Traitements des données : Vérification Voiture récepteur Déterminer la localisation de voiture Traitements des données : calcule de zone de sécurité ESP NOW Transmission des données Voiture émetteur 3. Processus de communication actionneur
- 7. MQTT : MQTT Publish/Subscribe architecture 2. Protocol de communication Publish to topic : voiture Subscribe to topic : voiture MQTT client Subscribre : Mobile device MQTT client Subcribre: Data analysis server Subscribe to topic : voiture MQTT client Publisher : Car sensors MQTT Broker
- 8. GPS : localisation Capteur de tension Capteur de courant Collection des données Traitements des données TR série Gestion et stockage des données Visualisation des données Etablie la connections TR par WIFI 3. Processus de communication