Recommandé

Recommandé
Contenu connexe
Similaire à 2016_VTTIposter_Ivanco_v08
Similaire à 2016_VTTIposter_Ivanco_v08 (20)
2016_VTTIposter_Ivanco_v08
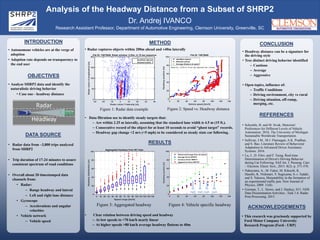
- 1. • Radar captures objects within 200m ahead and ±40m laterally • Data filtration use to identify steady targets that: – Are within 2.25 m laterally, assuming that the standard lane width is 4.5 m (15 ft.). – Consecutive record of the object for at least 10 seconds to avoid “ghost target” records. – Headway gap change <2 m/s (<5 mph) to be considered as steady state car following. • Clear relation between driving speed and headway – At low speeds to <70 km/h nearly linear – At higher speeds >80 km/h average headway flattens to 40m Analysis of the Headway Distance from a Subset of SHRP2 Research Assistant Professor, Department of Automotive Engineering, Clemson University, Greenville, SC Dr. Andrej IVANCO • Autonomous vehicles are at the verge of adoption • Adoption rate depends on transparency to the end user INTRODUCTION OBJECTIVES ACKNOWLEDGEMENTS • This research was graciously supported by Ford Motor Company University Research Program (Ford - URP) Headway Radar DATA SOURCE • Radar data from ~3,800 trips analyzed from SHRP2 • Trip duration of 17-24 minutes to assure consistent spectrum of road conditions • Overall about 20 timestamped data channels from: • Radar: – Range headway and lateral – Left and right lane distance • Gyroscope – Accelerations and angular velocities • Vehicle network – Vehicle speed METHOD RESULTS REFERENCES CONCLUSION Figure 1: Radar data example Figure 2: Speed vs. Headway distance Figure 4: Vehicle specific headwayFigure 3: Aggregated headway • Analyze SHRP2 data and identify the naturalistic driving behavior • Case one - headway distance 35 mph 45 mph 55 mph 65 mph • Headway distance can be a signature for the driving style • Tree distinct driving behavior identified – Cautious – Average – Aggressive • Open topics, influence of: – Traffic Conditions – Driving environment, city vs rural – Driving situation, off-ramp, merging, etc. • Schoettle, B. and M. Sivak, Motorists' Preferences for Different Levels of Vehicle Automation. 2016, The University of Michigan Sustainable Worldwide Transportation. • Sullivan, J.M., M.J. Flannagan, A.K. Pradhan, and S. Bao, Literature Review of Behavioral Adaptation to Advanced Driver Assistance Systems. 2016. • Lu, J., D. Filev, and F. Tseng, Real-time Determination of Driver's Driving Behavior during Car Following. SAE Int. J. Passeng. Cars – Electron. Electr. Syst., 2015. 8(2): p. 371-378. • Nakayama, A., M. Fukui, M. Kikuchi, K. Hasebe, K. Nishinari, Y. Sugiyama, S.-i. Tadaki, and S. Yukawa, Metastability in the formation of an experimental traffic jam. New Journal of Physics, 2009. 11(8). • Gorman, T., L. Stowe, and J. Hankey, S31: NDS Data Dissemination Activities , Task 1.6: Radar Post-Processing. 2015.