Recommandé

Recommandé
Contenu connexe
Similaire à Final Senior Design Posterwork
Similaire à Final Senior Design Posterwork (20)
Final Senior Design Posterwork
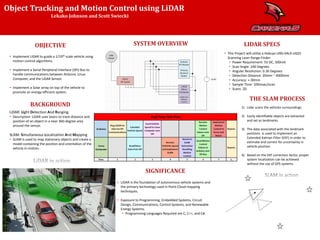
- 1. Object Tracking and Motion Control using LiDAR • Implement LiDAR to guide a 1/10th scale vehicle using motion control algorithms. • Implement a Serial Peripheral Interface (SPI) Bus to handle communications between Arduino, Linux Computer, and the LiDAR Sensor. • Implement a Solar array on top of the vehicle to promote an energy efficient system. LiDAR: Light Detection And Ranging. • Description: LiDAR uses lasers to track distance and position of an object in a near 360-degree area around the sensor. SLAM: Simultaneous Localization And Mapping • SLAM is used to map stationary objects and create a model containing the position and orientation of the vehicle in motion. Lekako Johnson and Scott Swiecki • LiDAR is the foundation of autonomous vehicle systems and the primary technology used in Point-Cloud mapping techniques. • Exposure to Programming, Embedded Systems, Circuit Design, Communications, Control Systems, and Renewable Energy Systems. • Programming Languages Required are C, C++, and C#. • This Project will utilize a Hokuyo URG-04LX-UG01 Scanning Laser Range Finder. • Power Requirement: 5V DC, 500mA • Scan Angle: 240 Degrees • Angular Resolution: 0.36 Degrees • Detection Distance: 20mm ~ 4000mm • Accuracy: +-30mm • Sample Time: 100msec/scan • Scans: 2D 1) Lidar scans the vehicles surroundings. 2) Easily identifiable objects are extracted and set as landmarks. 3) The data associated with the landmark positions is used to implement an Extended Kalman Filter (EKF) in order to estimate and correct for uncertainty in vehicle position. 4) Based on the EKF correction factor, proper system localization can be achieved without the use of GPS systems.
Notes de l'éditeur
- GET NEW PICS