
Recommandé
Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
En vedette (20)
Similaire à Wbi Introduction
Similaire à Wbi Introduction (20)
Wbi Introduction
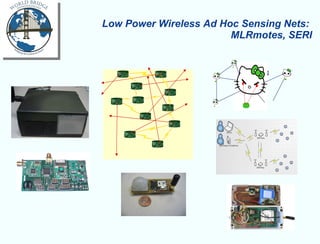
- 1. Low Power Wireless Ad Hoc Sensing Nets: MLRmotes, SERI
- 2. Overall Technology Development (E2E) COMMS SEGMENT SENSING SEGMENT Long Haul Radio Ground Station MOC Portal MOC SEGMENT C2 Network GROUND SEGMENT RS232 Long Haul Radio NIPRNET CEOSGUI Mote GUI DAY CAMERA NIGHT CAMERA Mission Programmer Network Comms Manual COP Relay MOTE FIELD Smart Sensor Long-Haul Comms POTS >100 Mini-Sensors C2PC (TASC) 1 2 3 4 5 8 6 7 9 10 11 12 Clients Smart Sensor TIERS 3 2 1 GPS MLRmotes SERI ARMMIC SWE (SensorNet) SENSOR COMMS END USERS Databases
- 5. MLR – Conceptual Design (Track data) 1 2 3 4 5 6 7 8 t1 H1, R1 t2 H2, R2 t2 H3, R3 t3 -, - t4 H4, R4 t4 H5, R5 t4 H6, R6 t5 H7, R7 t6 H8, R8 t7 -, - t8 H9, R9 Track data (TIME, HEADING, RANGE)
- 9. ARMMIC
- 12. ARMMIC System (prototype I) GUI data display Motor controller (reuse of 2005 MLR IRaD) Motor arrangement w/laser scanner ARMMIC INITIAL Test System
- 13. ARMMIC Initial Capabilities Demonstration Note penetration of baffles, vents, fixtures indicate drop ceiling & “real” (concrete) ceiling Scans of small conference room showing operator (baseball capped), and associated “shadow”. Scanner origin
- 14. ARMMIC Initial Capabilities Demonstration IIz Scanner origin Note subtle structures as tile rails, baffled lighting, and dropped projector Total time duration for scan was 65-70 seconds at resolution (1-degree). A reduced data set option exists; allows for estimated volume (3D box) drawing ; a flattened, 2D output is optional).