
Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Image pipeline
Similaire à Image pipeline (20)
Dernier
Dernier (20)
Image pipeline
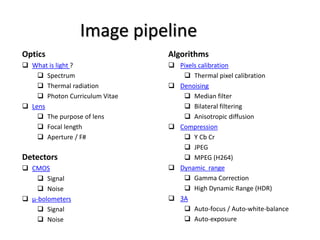
- 1. Image pipeline Algorithms Pixels calibration Thermal pixel calibration Denoising Median filter Bilateral filtering Anisotropic diffusion Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-focus / Auto-white-balance Auto-exposure Optics What is light ? Spectrum Thermal radiation Photon Curriculum Vitae Lens The purpose of lens Focal length Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise
- 2. האור מהות פיזיקלית תורהתוקף פגותנשאתופעהלדוגמה קוונטית פיזיקהתקף תמידפוטוניםלייזרים קרינתשחור גוף משוואותמקסוולאנרגיה<hνחשמלי שדה)ומגנטי)ה צבעשמיים הגלים תורתהגל למקור קרובאלקטרומגנטיים גליםאנטי ציפוי-רפלקטיבי מצפלאלומהדיכרואי גיאומטרית אופטיקהמימדפיזי≤גל אורךאור קרניאברציות פרקסיאלית אופטיקהSin(θ) < θקרנייםפרקסיאליותהגדלהאופטית
- 3. האור של הפיזיקליים המודלים שקילות השני כחוט עובר פרמה עקרון הפיזיקליים המודלים כל בין
- 4. Spectrum האור מהירות=גל אורך Xתדר קשת נוצרת איך? כחולים השמיים למה? נראה באור קורנת השמש למה? קורן האדם גוף האם?
- 6. פוטון של חיים קורות •יצירה(שמש/להט מנורת/פלורוסנט/LED) •לצבע כמקור בליעה •פיזורספקולרי/דיפוזיבי •לאישון המגיע האור עוצמת •העין ברשתית בליעה
- 7. Algorithms Pixels calibration Thermal pixel calibration Denoising Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-white-balance Auto-focus Auto-exposure Optics What is light ? Spectrum Thermal radiation Visible Light Curriculum Vitae Lens The purpose of lens Focal length Numerical Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise Image pipeline
- 9. Solutions
- 10. מוקד אורך אורךמוקד הדמות מיקום הגלאי מיקום ראייה שדההאופטי התכן מורכבות
- 11. העדשה מפתח השפעות: מורכבותהתכןהאופטי עומקהשדה כמותהאנרגיהפרפיקסל הגדרה:F# = f/D
- 12. Algorithms Pixels calibration Thermal pixel calibration Denoising Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-white-balance Auto-focus Auto-exposure Optics What is light ? Spectrum Thermal radiation Visible Light Curriculum Vitae Lens The purpose of lens Focal length Numerical Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise Image pipeline
- 14. פיקסל
- 15. פוטודיודה–לחשמלי אופטי סיגנל המרת N-type-Silicon - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - P-type-Silicon + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + + - diffusion - + electrical fieldE0 0 0 0 0 0 0 0 0 0 0 0 + - h - + - - - + depletion zone
- 16. Signal • Optical Filters – Bayer (for Color image) – AR Coating • Quantum Efficiency –Fill factor / Micro lens / Back illumination • Integration time and size • Analog to Digital Conversion (ADC)
- 17. ADC - Analog to Digital Converter • Sensor converts the continuous light signal to a continuous electrical signal • The analog signal is converted to a digital signal – at least 10 bits (even on cell phones), often 12 or more – (roughly) linear sensor response
- 18. ISO = amplification in AD conversion Before conversion the signal can be amplified ISO 100 means no amplification ISO 1600 means 16x amplification can see details in dark areas better noise is amplified as well; sensor more likely to saturate
- 19. Color RGB
- 20. Bayer pattern
- 21. Demosaicking
- 22. Interpolation Fails at sharp edges More sophisticated filterBilinear interpolation Estimate: G @ + Based on: G @ ·
- 23. Zippering artifact In this area R = G = B = 1 In this area R = G = B = 0 Red Pixel Value = ( – 1 – 1 + 4 – 1 + ½ + 5 + ½ = 7 ) / 8 Red Pixel Value = ( 5.5 = - 3/2*3 + 2*2 + 6 ) / 8 ≠ Let’s interpolate the RED value in the above GREEN and BLUE subpixels
- 24. Sparse Color Filter Array
- 25. Noise Noise sources • Shot noise (quantum) • Johnson–Nyquist noise (Thermal) • Grid (50 Hz) • EMC (Electro Magnetic Compatibility) • Dark current (Exponential temperature dependence) • Pixel non uniformity – PRNU (Photo-Response Non-Uniformity) – DSNU )Dark + Bias Signal Non-Uniformity )
- 26. Algorithms Pixels calibration Thermal pixel calibration Denoising Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-white-balance Auto-focus Auto-exposure Optics What is light ? Spectrum Thermal radiation Visible Light Curriculum Vitae Lens The purpose of lens Focal length Numerical Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise Image pipeline
- 27. μ-bolometers
- 28. μ-bolometers noise • Distance (atmospheric attenuation & image size) • Housing Temperature (affected also by wind) • Pixels Non-Uniformity (Necessitates calibration) FOV < 20% of Hemisphere
- 29. Algorithms Pixels calibration Thermal pixel calibration Denoising Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-white-balance Auto-focus Auto-exposure Optics What is light ? Spectrum Thermal radiation Visible Light Curriculum Vitae Lens The purpose of lens Focal length Numerical Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise Image pipeline
- 30. From “raw-raw” to RAW • Pixel Non-Uniformity – each pixel has a slightly different sensitivity to light • for CMOS: ~ 1% • for μ-bolometers: ~10% gain, ~100% offset – reduce by calibrating an image with a flat-field image • also mitigates the effects of vignetting • Stuck pixels – some pixels are turned always on or off – identify, replace with filtered values (nearest neighbor or median) • Dark floor (for CMOS) detectors – Heat generates free electrons according to Boltzmann distribution – Subtract the signal of covered pixels located around the exposed sensor
- 32. One Point NUC ? Why offset is needed? Why not simply subtract the shutter image ?
- 33. Why offset is needed? Why not simply subtract the shutter image ? One Point NUC 𝑈 𝑂𝑏𝑗𝑒𝑐𝑡 𝜗 𝐶 = 𝑈 𝑂𝑝𝑒𝑛 𝜗 𝐶 − Ω 𝐶 𝜋 𝑈𝑠ℎ 𝜗 𝐶 ≠ 𝑈 𝑂𝑝𝑒𝑛 𝜗 𝐶 − 𝑈𝑠ℎ 𝜗 𝐶 = 𝑈 𝑂𝑏𝑗𝑒𝑐𝑡 − 𝜔 𝐹𝑂𝑉 𝑈𝑠ℎ 𝜗 𝐶 Left hand side is independent of Right hand side depends on the camera case temperature X
- 34. Non-Radiometric measures ΔT (Temperature difference) Radiometric measures T (Object Temperature) but necessitates more calibrations
- 35. Denoising • Median is better than average • Bilateral filtering • Anisotropic diffusion • Non-local means
- 36. 2D Median Filtering Original Image Filtered Image Filtered Image Filter Filter
- 37. Eg. Median Filter – Impulsive Noise
- 38. Department of Computer Science and Engineering, Hanyang University Spatial LPF, BPF, HPF Spatial averaging ),( nmu ),( nmVLP LPF + ),( nmVHP ),( nmu LPF LPF ),(1 nmhL ),(2 nmhL + ),( nmVBP),( nmu (a) Spatial low-pass filter (b) Spatial high-pass filter (c) Spatial band-pass filter ),(),(),( ),(),(),( 21 nmhnmhnmh nmhnmnmh LLBP LPHP
- 39. Denoising by Low Pass Filter (LPF could be e.g. local average) Noisy! Blurred! Trade-off?
- 40. Department of Computer Science and Engineering, Hanyang University Directional Smoothing Directional Smoothing to protect the edges from blurring while smoothing ):,(),( ),( 1 ):,( ),( nmvnmv lnkmy N nmv lk W |):,(),(|min nmvnmythatsuch outFind W l k directionseveralincalculatedare,,averagesspatial nmv
- 41. Department of Computer Science and Engineering, Hanyang University Original image Lowpass Filter(Long Term) Direc. Smoothing (대각선) Direc. Smoothing (수 직) Eg. Directional Smoothing
- 42. Bilateral filter A bilateral filter is a non-linear, edge-preserving, and noise-reducing smoothing filter for images.
- 43. The bilateral filter in its direct form can introduce several types of image artifacts: • Staircase effect – intensity plateaus that lead to images appearing like cartoons[3] • Gradient reversal – introduction of false edges in the image.[4]
- 44. inhomogeneous and nonlinear or Perona-Malik diffusion http://bioen.utah.edu/wiki/images/d/d8/peronamalik90.pdf cited by 13541 articles !
- 46. Anisotropic approach main drawback of the non-linear approach we saw earlier, was lack of intra-edge smoothing Solution: shape-adapted smoothing
- 47. Original Linear isotropic diffusion (simple gaussian)
- 48. Original Non-linear isotropic diffusion (edge skipping)
- 49. Original Non-linear anisotropic diffusion
- 50. Denoising using non-local means • Most image details occur repeatedly • Each color indicates a group of squares in the image which are almost indistinguishable • Image self-similarity can be used to eliminate noise – it suffices to average the squares which resemble each other
- 51. Algorithms Pixels calibration Thermal pixel calibration Denoising Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-white-balance Auto-focus Auto-exposure Optics What is light ? Spectrum Thermal radiation Visible Light Curriculum Vitae Lens The purpose of lens Focal length Numerical Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise Image pipeline
- 52. 4 Y Cb Cr ITU-R BT.601 defines Y′CbCr in terms of R'G'B' as follows: The prime ′ symbols mean gamma correction is being used; thus R′, G′ and B′ nominally range from 0 to 1 Y “Luma” (Brightness) can be stored and transmitted with high resolution CB , CR Chroma (Color) can be subsampled or compressed The subsampling scheme is commonly expressed as a three part ratio J:a:b (e.g. 4:2:0) Y = 1/4 R + 5/8 G + 1/8 B works fine and quicker to compute: R>>2 + G>>1 + G>>3 + B>>3
- 53. Further compression - JPEG Coding Y Cb Cr DPCM RLC Entropy Coding Header Tables Data Coding Tables Quant… Tables DCT f(i, j) 8 x 8 F(u, v) 8 x 8 Quantization Fq(u, v) Zig Zag Scan Steps Involved: 1. Discrete Cosine Transform of each 8x8 pixel array f(x,y) T F(u,v) 2. Quantization using a table or using a constant 3. Zig-Zag scan to exploit redundancy 4. Differential Pulse Code Modulation(DPCM) on the DC component and Run length Coding of the AC components 5. Entropy coding (Huffman) of the final output More details are provided in the appendix at the end of this presentation
- 54. Even further compression – H264 • A frame of video is one screenshot. • Code frames as two types – I-frames or Intra-coded frames: Coded by exploiting redundancy within the frame • You can think of these as being just the JPEG coding of the frame • These are reference points in the video sequence – P-frames or Inter-coded frames • These are codings of frames that exploit their similarity with previously coded frames • Also called predicted or pseudo frames • An example Frame Sequence: J P E G I P P P P PI J P E G I J P E G MPEG-4 is a digital media compression standard while H.264 is a component of the standard specifying digital video compression.
- 55. Appendix - JPEG Details Multimedia Systems (Module 4 Lesson 1) Summary: • JPEG Compression – DCT – Quantization – Zig-Zag Scan – RLE and DPCM – Entropy Coding • JPEG Modes – Sequential – Lossless – Progressive – Hierarchical
- 56. Why JPEG • The compression ratio of lossless methods (e.g., Huffman, Arithmetic, LZW) is not high enough for image and video compression. • JPEG uses transform coding, it is largely based on the following observations: – Observation 1: A large majority of useful image contents change relatively slowly across images, i.e., it is unusual for intensity values to alter up and down several times in a small area, for example, within an 8 x 8 image block. A translation of this fact into the spatial frequency domain, implies, generally, lower spatial frequency components contain more information than the high frequency components which often correspond to less useful details and noises. – Observation 2: Experiments suggest that humans are more immune to loss of higher spatial frequency components than loss of lower frequency components.
- 57. JPEG Coding Y Cb Cr DPCM RLC Entropy Coding Header Tables Data Coding Tables Quant… Tables DCT f(i, j) 8 x 8 F(u, v) 8 x 8 Quantization Fq(u, v) Zig Zag Scan Steps Involved: 1. Discrete Cosine Transform of each 8x8 pixel array f(x,y) T F(u,v) 2. Quantization using a table or using a constant 3. Zig-Zag scan to exploit redundancy 4. Differential Pulse Code Modulation(DPCM) on the DC component and Run length Coding of the AC components 5. Entropy coding (Huffman) of the final output
- 58. DCT : Discrete Cosine Transform DCT converts the information contained in a block(8x8) of pixels from spatial domain to the frequency domain. – A simple analogy: Consider a unsorted list of 12 numbers between 0 and 3 -> (2, 3, 1, 2, 2, 0, 1, 1, 0, 1, 0, 0). Consider a transformation of the list involving two steps (1.) sort the list (2.) Count the frequency of occurrence of each of the numbers ->(4,4,3,1 ). : Through this transformation we lost the spatial information but captured the frequency information. – There are other transformations which retain the spatial information. E.g., Fourier transform, DCT etc. Therefore allowing us to move back and forth between spatial and frequency domains. 1-D DCT: 1-D Inverese DCT: F() a(u) 2 f(n)cos (2n1) 16 n 0 N1 a(0) 1 2 a(p)1 p0 f'(n) a(u) 2 F()cos (2n1) 16 0 N1
- 59. Example and Comparison 0 20 40 60 80 0 1 2 3 4 5 6 7 100 -52 0 -5 0 -2 0 0.4 36 10 10 6 6 4 4 4 36 10 10 6 6 4 4 4100 -52 0 -5 0 -2 0 0.4 24 12 20 32 40 51 59 488 15 24 32 40 48 57 63 0 20 40 60 80 0 1 2 3 4 5 6 7 0 20 40 60 80 0 1 2 3 4 5 6 7 DCT FFT Inverse DCT Inverse FFT Example Description: r f(n) is given from n = 0 to 7; (N=8) r Using DCT(FFT) we compute F(ω) for ω = 0 to 7 r We truncate and use Inverse Transform to compute f’(n)
- 60. 2-D DCT • Images are two-dimensional; How do you perform 2-D DCT? – Two series of 1-D transforms result in a 2-D transform as demonstrated in the figure below 1-D Row- wise 1-D Column- wise 8x8 8x8 8x8 j)f(i, v)F(u, r F(0,0) is called the DC component and the rest of F(i,j) are called AC components
- 61. 2-D Transform Example • The following example will demonstrate the idea behind a 2-D transform by using our own cooked up transform: The transform computes a running cumulative sum. 1 1-D Row- wise 1-D Column- wise 8x8 8x8 8x8 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 8 7 6 5 4 3 2 1 64 56 48 40 32 24 16 8 56 48 40 32 24 16 8 49 42 35 28 21 14 7 42 36 30 24 18 12 6 35 30 25 20 15 10 5 28 24 20 16 12 8 4 21 18 15 12 9 6 3 14 12 10 8 6 4 2 7 6 5 4 3 2 1 8 nmy (n)f)(F My Transform: j)f(i, v)(u,myF Note that this is only a hypothetical transform. Do not confuse this with DCT
- 62. Quantization • Why? -- To reduce number of bits per sample F’(u,v) = round(F(u,v)/q(u,v)) • Example: 101101 = 45 (6 bits). Truncate to 4 bits: 1011 = 11. (Compare 11 x 4 =44 against 45) Truncate to 3 bits: 101 = 5. (Compare 8 x 5 =40 against 45) Note, that the more bits we truncate the more precision we lose • Quantization error is the main source of the Lossy Compression. • Uniform Quantization: – q(u,v) is a constant. • Non-uniform Quantization -- Quantization Tables – Eye is most sensitive to low frequencies (upper left corner in frequency matrix), less sensitive to high frequencies (lower right corner) – Custom quantization tables can be put in image/scan header. – JPEG Standard defines two default quantization tables, one each for luminance and chrominance.
- 63. Zig-Zag Scan • Why? -- to group low frequency coefficients in top of vector and high frequency coefficients at the bottom • Maps 8 x 8 matrix to a 1 x 64 vector 8x8 . . . 1x64
- 64. DPCM on DC Components • The DC component value in each 8x8 block is large and varies across blocks, but is often close to that in the previous block. • Differential Pulse Code Modulation (DPCM): Encode the difference between the current and previous 8x8 block. Remember, smaller number -> fewer bits 45 54 48 32 45 9 -6 12 36 4 . . . . . . 1x64 1x64 1x64 1x64 1x64 1x64 1x64 1x64 1x64 1x64
- 65. RLE on AC Components • The 1x64 vectors have a lot of zeros in them, more so towards the end of the vector. – Higher up entries in the vector capture higher frequency (DCT) components which tend to be capture less of the content. – Could have been as a result of using a quantization table • Encode a series of 0s as a (skip,value) pair, where skip is the number of zeros and value is the next non-zero component. – Send (0,0) as end-of-block sentinel value. . . . 1x64 0 0 0 0 0 1 1 0 0 0 0 0 5,1 0 0 7,2 0 . . .2
- 66. Entropy Coding: DC Components • DC components are differentially coded as (SIZE,Value) – The code for a Value is derived from the following table SIZE Value Code 0 0 --- 1 -1,1 0,1 2 -3, -2, 2,3 00,01,10,11 3 -7,…, -4, 4,…, 7 000,…, 011, 100,…111 4 -15,…, -8, 8,…, 15 0000,…, 0111, 1000,…, 1111 . . . . 11 -2047,…, -1024, 1024,… 2047 … Size_and_Value Table
- 67. Algorithms Pixels calibration Thermal pixel calibration Denoising Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-white-balance Auto-focus Auto-exposure Optics What is light ? Spectrum Thermal radiation Visible Light Curriculum Vitae Lens The purpose of lens Focal length Numerical Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise Image pipeline
- 68. How many bits are needed for smooth shading? • human vision has contrast sensitivity ~1% • call black 1, white 100 • you can see differences between: • 1, 1.01, 1.02, … needed step size ~ 0.01 • 98, 99, 100 needed step size ~ 1 • with linear encoding • delta 0.01 – 100 steps between 99 & 100 wasteful • delta 1 – only 1 step between 1 & 2 lose detail in shadows • instead, apply a non-linear power function, gamma • provides adaptive step size • 8 bits span contrast ratio of 13:1 • 1.01^(2^8) ≈ 13 • More accurately: 1% 1.5%, 13 1.015^(2^8) ≈ 45
- 69. Gamma Correction compress stretch 1 < γ0 < γ < 1 𝑔 = 𝑓 𝛾 [𝑅𝑎𝑛𝑔𝑒 𝑓] 𝛾 ~𝑓 𝛾
- 70. Concatenated Gamma (γ) γdisplay Signalout ~ Signalin ^ γ γtotal = γdetector x γImageEnhancement x γdisplay Image processing better be implemented in linear space, γ = 1/ γdetector
- 71. High Dynamic Range HDR •שצג ראינו קודם8של קונטרסט מאפשר ביט45:1רזולוציה אובדן ללא, במתיחת שימוש תוך:γ1.015^(2^8) ≈ 45 •מתיחת אין בגלאיγ,קונטרסט לאותו להגיע כדי לכן,נדרשים12ביטים 1.015*(2^12) ≈ 1.015^(2^8) •מספיק לא זה גם אבל יותר הרבה גדול טיפוסית בתמונה הקונטרסט כי •חשיפות מספר ידי על הגלאי של הדינמי התחום את להגדיל אפשר (automatic exposure bracketing)פריים בכל
- 72. A ‘bit’ of conversion 12-bit RAW 12-bit RAW 12-bit RAW 8-bit 32-bit HDR 8-bit HDR8-bit 8-bit RAW Conversion (optional) Exposure Blending Tone Mapping (Dynamic Range Compression)
- 73. HDR Examples
- 74. Simple contrast reduction Local tone mapping Every pixel in the image is mapped in the same way, independent of the value of surrounding pixels in the image, according to a global function e.g. from 32 bits to 12 bits. Gamma Correction is an examples of global tone mapping Histogram Equalization is another more effective example Those techniques are simple and fast, but they can cause a loss of contrast.
- 75. TMO (Tone Mapping Operations) methods • https://www.cl.cam.ac.uk/~rkm38/pdfs/tone_mapping.pdf • https://www.cl.cam.ac.uk/~rkm38/pdfs/eilertsen2017tmo_star.pdf • https://www.cl.cam.ac.uk/~rkm38/pdfs/mantiuk15hdri.pdf • https://www.cl.cam.ac.uk/~rkm38/pdfs/myszkowski08hdrvideo.pdf
- 76. Algorithms Pixels calibration Thermal pixel calibration Denoising Compression Y Cb Cr JPEG MPEG (H264) Dynamic range Gamma Correction High Dynamic Range (HDR) 3A Auto-white-balance Auto-focus Auto-exposure Optics What is light ? Spectrum Thermal radiation Visible Light Curriculum Vitae Lens The purpose of lens Focal length Numerical Aperture / F# Detectors CMOS Signal Noise μ-bolometers Signal Noise Image pipeline
- 77. Auto-white-balance • The dominant light source (illuminant) produces a color cast that affects the appearance of the scene objects • The color of the illuminant determines the color normally associated with white by the human visual system • Auto-white-balance – Identify the illuminant color – Neutralize the color of the illuminant
- 78. Contrast-based auto-focus • ISP can filter pixels with configurable IIR filters – to produce a low-resolution sharpness map of the image • The sharpness map helps estimate the best lens position – by summing the sharpness values • either over the entire image • or over a rectangular area Phase Detect auto-focus
- 79. Auto-exposure • Goal: well-exposed image Possible parameters to adjust: – Exposure time • Longer exposure leads to brighter image and better SNR • but also motion blur and saturation – Aperture (f-number) • Smaller F# also leads to brighter image and better SNR • but also decreased Depth of focus and saturation – Analog and digital gain • Higher gain makes image brighter but amplifies noise as well
- 80. Exposure metering May be applied to either the full frame or central region of interest
- 81. Image Enhancement Histogram Manipulations Stretching (J3) Equalization CLAHE FLIR’s histogram equalization Plateau Equalization (Day and Night) Information-Based Equalization Low light (L6) Invert - de-haze – Revert (L6)
- 82. Image Histograms • An image histogram is a plot of the gray-level frequencies (i.e., the number of pixels in the image that have that gray level).
- 84. Sometimes histogram stretching is better than histogram equalization
- 85. And sometimes histogram stretching is useless
- 86. Image Histograms (cont’d) • Divide frequencies by total number of pixels to represent as probabilities. Nnp kk /=
- 87. Histogram Equalization (cont’d) de-normalize: sk x (L-1) 𝑟𝑖+1 > 𝑟𝑖 ∀𝑖 𝑃𝑆 𝑠𝑗 = 𝑘 𝑗=0 𝑃𝑟 𝑟𝑗 𝑘 𝑗=0 = 𝑠 𝑘 Why does the T transformation generates equalized histogram ? 𝑃 𝑠 𝑑𝑠 𝑠 𝑘 0 = 𝑠 𝑘 𝑖𝑓𝑓 𝑃 𝑠 = 1 𝑓𝑜𝑟 0 < 𝑠 < 1 0 𝑒𝑙𝑠𝑒
- 88. Explicit Algorithm for Histogram equalization For an M * N image of G gray-levels, create two arrays H and T of length G initialized with 0 values. Form the image histogram: scan every pixel and increment the relevant member of H. If pixel X has intensity p, perform: Form the cumulative image histogram Hc and store the result in the same array H Rescan the image and write an output image with gray-levels q by setting Copied from: AN EFFICIENT VIDEO ENHANCEMENT METHOD USING LA*B* ANALYSIS Gaurav Mittal, Sushrutha Locharam & Sreela Sasi Glenn R. Shaffer & Ajith K. Kumar
- 89. AHE - Adaptive Histogram Equalization For each pixel Use only the pixels in its neighborhood in order to calculate the transformation
- 90. CLAHE Contrast Limited AHE CLAHE was developed to prevent the over amplification of noise that AHE may introduce. CLAHE limits the amplification by clipping the histogram at a predefined value before computing the CDF.
- 91. Plateau Equalization (used by FLIR in most products) In classical Histogram equalization: 𝑠 𝑘 = 𝑁𝑖 𝑘 𝑗=0 𝑛 In practice, for 14 bit data, binning should be implemented, e.g. to 8 bit bins: 𝑁𝑖 = 𝑛𝑗 26∗ 𝑖+1 −1 𝑗=2(14−8)∗𝑖 , 𝑖 ∈ (0,255) So the binning changes the classical histogram equalization to: In ‘Plateau Equalization’ the bins values are modified as follows: • • 𝑁𝑖 = min( 𝑁𝑖 , const ~ "Linear Percent" ) to ensure grayscale separation between different temperatures 𝑁𝑖 = max( 𝑁𝑖 , "Plateau Value" ∗ n ) In order not to waste too many gray levels on uniform regions (like the sky) 𝑠 𝑘 = 𝑁𝑖 𝑘 𝑗=0 𝑁𝑖 255 𝑗=0 Thus in Plateau Equalization the transformation is:
- 92. Plateau Equalization Additional parameters There are few more parameters that define FLIR’s transformation, but those values are more general to video histogram manipulation (not specific to thermal data)
- 93. Information-Based Equalization (used in Boson enabled by Movidius) The scene data is segregated into details and background using a High-Pass (HP) and Low-Pass (LP) filter. Pixel values in the HP image are weighted more heavily during the histogram-generation.
- 94. Low light image enhancement According to “A Survey of Video Enhancement Techniques” by Yunbo Rao, Leiting Chen (2011) Only two methods are applicable to real time low light videos: 1. Apply Histrogram Equalization to the Y channel in Y Cb Cr 2. Invert – de-haze – Revert, as will be elaborated in the next slides 1. AN EFFICIENT VIDEO ENHANCEMENT METHOD USING LA*B* ANALYSIS Gaurav Mittal, Sushrutha Locharam & Sreela Sasi Glenn R. Shaffer & Ajith K. Kumar 2. Fast efficient algorithm for enhancement of low lighting video X. Dong, Y. Pang and J.Wen, (2010)
- 95. Let’s dwell into the inspiring algorithm: Dehaze Mathematical Model of Atmospheric Scattering : • I(x) is the observed radiance at x • J(x) is the original scene radiance at x • A is the airlight • t(x), scalar called transmission: describes how the radiance of a point in the scene is attenuated according to its distance d from the observer • Note that I, J, A are (R,G,B) triplets
- 96. The Atmospheric Scattering Model Mathematical Model: • In order to remove the effect of haze, one must recover J(x) • Quantities A and t are typically unknown • I(x) is known
- 97. • In every region there is a ”dark channel” for which the object has negligible contribution to the signal. • Out of the intensities that correspond to the Jdark(x) the top percentile stems from long distanced objects (or the sky) • Thus the average intensity of the brightest dark channel estimates the airlight = A “Single Image Haze Removal Using Dark Channel Prior” A (airlight) estimation 𝐵𝑟𝑖𝑔ℎ𝑡𝑒𝑠𝑡 𝑑𝑎𝑟𝑘 𝑐ℎ𝑎𝑛𝑛𝑒𝑙 0 𝐵𝑟𝑖𝑔ℎ𝑡𝑒𝑠𝑡 𝑑𝑎𝑟𝑘 𝑐ℎ𝑎𝑛𝑛𝑒𝑙 A ≈0
- 98. “Single Image Haze Removal Using Dark Channel Prior” transmission t(x) estimation Since the observed intensity corresponding to the dark channel stems only from the airlight (for both far and close objects). The transmission (and hence also the distance) can be estimated by calculating: Dark channel of the region divided by the airlight color And the Recovery equation is: 𝐽 𝑥 = 𝐼 𝑥 − 𝐴 1 − 𝑡 𝑥 𝑡 𝑥 = 𝐼 𝑥 − 𝐴 𝑡 𝑥 + 𝐴
- 99. “FAST EFFICIENT ALGORITHM FOR ENHANCEMENT OF LOW LIGHTING VIDEO” 𝐽 𝑥 = 𝐼 𝑥 − 𝐴 P(x) 𝑡 𝑥 + 𝐴 The above mentioned ‘equation (7)’ is a just a minor modification of the Recovery equation from previous slide: With the modification being:המאמר תקציר ניתןלהורדה זה בקישור
- 100. Edge detection Convert a 2D image into a set of curves • Extracts salient features of the scene • More compact than pixels
- 101. Canny Edge detection
- 102. The discrete gradient How can we differentiate a digital image f[x,y]? • Option 1: reconstruct a continuous image, then take gradient • Option 2: take discrete derivative (finite difference) How would you implement this as a cross-correlation?
- 103. The Sobel operator Better approximations of the derivatives exist • The Sobel operators below are very commonly used -1 0 1 -2 0 2 -1 0 1 1 2 1 0 0 0 -1 -2 -1 • The standard defn. of the Sobel operator omits the 1/8 term – doesn’t make a difference for edge detection – the 1/8 term is needed to get the right gradient value, however
- 104. Effects of noise Consider a single row or column of the image • Plotting intensity as a function of position gives a signal Where is the edge?
- 105. Where is the edge? Solution: smooth first Look for peaks in
- 106. Derivative theorem of convolution This saves us one operation:
- 107. Laplacian of Gaussian Consider Laplacian of Gaussian operator Where is the edge? Zero-crossings of bottom graph
- 108. 2D edge detection filters is the Laplacian operator: Laplacian of Gaussian Gaussian derivative of Gaussian
- 109. The Canny edge detector original image (Lena)
- 110. The Canny edge detector norm of the gradient
- 111. The Canny edge detector thresholding
- 112. Non-maximum suppression Check if pixel is local maximum along gradient direction • requires checking interpolated pixels p and r
- 113. The Canny edge detector thinning (non-maximum suppression) & Hysteresys
- 114. Hysteresis Check that maximum value of gradient value is sufficiently large • drop-outs? use hysteresis – use a high threshold to start edge curves and a low threshold to continue them.
- 115. The challenges of edge detection Texture Low-contrast boundaries
- 116. Fusion • Registration • Pixel-Based Opponent-Color Fusion • Gaussian & Laplacian pyramids • Fused pictures from Nyx – 211 and public domain • Other methods (Literature Review)
- 118. Pixel-Based Opponent-Color Fusion מתוך המקורי האלגוריתםהמאמרProgress in color night vision: מבין פיקסל כל עבורVGAפיקסלים, בצג הפיקסל ערכי(R, G, B)של הפיקסל בערך תלוייםהסיוניקס(I_Sionyx)התרמי ושל (I_Therm)כלהלן: • MIN = Min { I_Sionyx , I_Therm } • I_Sionyx* = I_Sionyx – MIN • I_Therm* = I_Therm – MIN • R = I_Therm - I_Sionyx* • G = I_Sionyx - I_Therm* • B = I_Therm* - I_Sionyx* שיושם האלגוריתם: •טריוויאלי הכי באופן הדינמי התחום מתיחת: I_new = (I_old - I_GlobalMin) / (_GlobalMax - I_GlobalMin) •המקורי האלגוריתם יישום •הכחול בערוץ הסיגנל הנמכת:G G / 2
- 119. 2)*( 23 gaussianGG 1G The Gaussian Pyramid High resolution Low resolution Image0G 2)*( 01 gaussianGG 2)*( 12 gaussianGG 2)*( 34 gaussianGG blur blur blur blur
- 120. Gaussian Pyramid Laplacian Pyramid The Laplacian Pyramid 0G 1G 2G nG - = 0L - = 1L - = 2L nn GL )expand( 1 iii GGL )expand( 1 iii GLG
- 121. Gaussian Pyramid Laplacian Pyramid The Laplacian Pyramid 0G 1G 2G nG = + 0L = + 1L = + 2L nn GL )expand( 1 iii GGL )expand( 1 iii GLG
- 122. Image Fusion Multi-scale Transform (MST) = Obtain Pyramid from Image Inverse Multi-scale Transform (IMST) = Obtain Image from Pyramid
- 123. Laplacian Pyramids
- 124. IR in Red ; VIS in Green as Captured from U211 (without any image processing or registration)
- 126. LP fusion without registration
- 131. A survey of infrared and visual image fusion methods from Infrared Physics & Technology (2017) 24 pages with Kwords per page and 177 References Summarized to 1 slide: IR + VIS algorithms Feature (edges and textures) e.g. bilateral filter Signal (Pixels) Minimum artifacts in the fused image Spatial domain e.g. IR in Red, Vis in Green and Gradient transfer Transform domain e.g Laplacian pyramids, Wavelet, symbol (Humans) e.g. Sparse Rep. Generally, traditional algorithms cannot be used for video fusion due to the limitation of timeliness Specifically, Non-subsampled transform performs the best, “however, the high computational complexity limits the application in real-time applications”
- 132. Infrared and visible image fusion methods and applications: A survey (2018) with 325 references The experiments are conducted on a desktop with 3.3 GHz Intel Core CPU, 8 GB memory, and MATLAB codes. Real time implementation use: FPGA or CUDA (Not DSP)
- 133. Infrared and …. A survey (2018) Results
- 134. Infrared and …. A survey (2018) Results
- 135. Range finding Stereoscopic Structured light (Kinect etc.) Time of flight (LRF) CW range finder (Innovative idea) Auto focus phase detector (used by Aptina / On semiconductors)
- 136. Introduction to Computer Vision Disparity and Depth If the cameras are pointing in the same direction, the geometry is simple. b is the baseline of the camera system, Z is the depth of the object, d is the disparity (left x minus right x) and f is the focal length of the cameras. Then the unknown depth is given by b Z = f b d
- 137. Introduction to Computer Vision Converging Cameras This is the more realistic case. The depth at which the cameras converge, Z0, is the depth at which objects have zero disparity. Finding Z0 is part of stereo calibration. Closer objects have convergent disparity (numerically positive) and further objects have divergent disparity (numerically negative). Object at depth Z
- 138. Lagrange Multipliers Maximize f(x,y) f in RWS: the difference between: { LEDs locations (x,y) } to { the measured locations (x*, y*) } Subject to g(x,y) g in RWS: the difference between: { the LEDs distance ( x-y ) } to the { predefined distance during assembly } The Lagrange multipliers method for Solution:
- 139. Structured light
- 140. Time of flight (LRF)
- 141. Innovative CW range finder
- 143. Introduction to Computer Vision • Extraction of edges • Representation of objects as interconnections of smaller structures, • Pattern matching • Eigen face
- 144. Computer Vision as a function • A function is a kind of mapping • In computer vision we seek for a function that maps an image (a digital signal) to a piece of information (e.g. – it is a cat) • Since there are finite number of possible images, a-priori it should be straightforward • However, the number of possible images is larger than the number of atoms in the universe
- 145. Information theory (Signal processing) Shannon Entropy quantifies The minimum number of bits required to deliver the data in a signal
- 146. Classical Approach HandCraftedFilters Hand crafted Filter 1 • Original Image Hand crafted Filter 2 • Processed Image 1 Hand crafted Filter 3 • Processed Image 2 … • … Hand crafted Filter n+1 • Processed Image n Output • Result
- 147. Modern Approach
- 148. נוירונים רשתות של מההצלחה מסקנות •רבוד מציאותיות בתמונות המידע •המידע את לזקק כדי(השכבות את לקלף) מורכבות בפונקציות להשתמש עדיף •האופטימלי המורכבות עומק ההיסק במערכת לתמוך האנושית מהקיבולת גבוה –האנושית הקיבולת במסגרת היסק למערכת דוגמא: •ראשונה שכבה:בתמונה פינות למצוא •שנייה שכבה:מסוים יחס מקיימים הפינות בין המרחקים האם לבדוק •שלישית שכבה:הקודם הפריים מאז הפינות מערכת מיקום שינוי חישוב •תוצאה:האובייקט תנועת
- 149. נוירונים רשתות •נוירונים רשת מהי? •איך"מלמדים"הרשת את? •CNN – Convolutional Neural Network •הספק דלות נוירונים רשתות
- 150. Machine “2” 1x 2x 256x …… …… y1 y2 y10𝑓: 𝑅256 → 𝑅10 In deep learning, the function 𝑓 is represented by neural network Handwriting Digit Recognition
- 151. נוירונים רשת של הארכיטקטורה
- 152. Output LayerHidden Layers Input Layer Neural Network Input Output 1x 2x Layer 1 …… Nx …… Layer 2 …… Layer L …… …… …… …… …… y1 y2 yM Deep means many hidden layers neuron
- 153. Example of Neural Network z z z e z 1 1 Sigmoid Function 1 -1 1 -2 1 -1 1 0 4 -2 0.98 0.12
- 154. Example of Neural Network 1 -2 1 -1 1 0 4 -2 0.98 0.12 2 -1 -1 -2 3 -1 4 -1 0.86 0.11 0.62 0.83 0 0 -2 2 1 -1
- 155. Example of Neural Network 1 -2 1 -1 1 0 0.73 0.5 2 -1 -1 -2 3 -1 4 -1 0.72 0.12 0.51 0.85 0 0 -2 2 𝑓 0 0 = 0.51 0.85 Different parameters define different function 𝑓 1 −1 = 0.62 0.83 𝑓: 𝑅2 → 𝑅2 0 0
- 156. How to set network parameters 16 x 16 = 256 1x 2x …… 256x …… …… …… …… Ink → 1 No ink → 0 …… y1 y2 y10 0.1 0.7 0.2 y1 has the maximum value Set the network parameters 𝜃 such that …… Input: y2 has the maximum valueInput: is 1 is 2 is 0 How to let the neural network achieve thisSoftmax 𝜃 = 𝑊1, 𝑏1, 𝑊2, 𝑏2, ⋯ 𝑊 𝐿, 𝑏 𝐿
- 157. Training Data • Preparing training data: images and their labels Using the training data to find the network parameters. “5” “0” “4” “1” “3”“1”“2”“9”
- 158. Backpropagation • A network can have millions of parameters. – Backpropagation is the way to compute the gradients efficiently (not today) – Ref: http://speech.ee.ntu.edu.tw/~tlkagk/courses/ML DS_2015_2/Lecture/DNN%20backprop.ecm.mp4/ index.html • Many toolkits can compute the gradients automatically
- 159. What is Convolution? Input Feature Map . . .
- 160. Convolution as feature extraction 2x2 Convolution + NL Sub-sampling Convolution + NL
- 161. Color (RGB) image One 4x4x3 filter (cube( The result of a single filter Another filter
- 162. A first layer of filters A second layer of filters An MNIST image A third layer of filters (treat this as 1176-D vector) A “fully connected” layer (as before(
- 164. ILSVRC 2012: top rankers http://www.image-net.org/challenges/LSVRC/2012/results.html N Error-5 Algorithm Team Authors 1 0.153 Deep Conv. Neural Network Univ. of Toronto Krizhevsky et al 2 0.262 Features + Fisher Vectors + Linear classifier ISI Gunji et al 3 0.270 Features + FV + SVM OXFORD_VGG Simonyan et al 4 0.271 SIFT + FV + PQ + SVM XRCE/INRIA Perronin et al 5 0.300 Color desc. + SVM Univ. of Amsterdam van de Sande et al
- 165. Imagenet 2013: top rankers http://www.image-net.org/challenges/LSVRC/2013/results.php N Error-5 Algorithm Team Authors 1 0.117 Deep Convolutional Neural Network Clarifi Zeiler 2 0.129 Deep Convolutional Neural Networks Nat.Univ Singapore Min LIN 3 0.135 Deep Convolutional Neural Networks NYU Zeiler Fergus 4 0.135 Deep Convolutional Neural Networks Andrew Howard 5 0.137 Deep Convolutional Neural Networks Overfeat NYU Pierre Sermanet et al
- 167. Tracking
- 168. Visual Object Tracking (VOT) ‘State Of The Art’ (SOTA) 2016 Discriminative correlation filters (DCF) Rules Frame rate
- 169. Review: Discriminative correlation filters 𝑊⋆ = 𝑎𝑟𝑔𝑚𝑖𝑛 𝑊 ||𝑊 ∗ 𝑋 − 𝑌||2 + 𝜆||𝑊||2 Objective function: ridge regression. X: input features Y: ground truth gaussian label W: correlation filter weight 𝑊 = (𝑋 𝑇 𝑋 + 𝜆𝐼)−1 𝑋 𝑇 𝑌 𝑓(𝑋) = 𝑊 ∗ 𝑋
- 170. By 2018 NN primed tracking
- 171. Typical Siamese CNN • Input: A pair of input signatures. • Output (Target): A label, 0 for similar, 1 else. Bromley, J., Bentz, J.W., Bottou, L., Guyon, I., LeCun, Y., Moore, C., Säckinger, E. and Shah, R., 1993. Signature Verification Using A "Siamese" Time Delay Neural Network. IJPRAI, 7(4), pp.669-688. Image Source: Google Share Weights
- 172. Siamese NN for RT object tracking