Relative motion and relative speed
•Télécharger en tant que PPT, PDF•
2 j'aime•5,090 vues

In this relative motion and relative speed concept is demonstrated with help of examples, graphically and mathematically. The concepts of Einstein and Galileo

Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
En vedette (20)
Similaire à Relative motion and relative speed
Similaire à Relative motion and relative speed (20)
Plus de Taimoor Muzaffar Gondal
Plus de Taimoor Muzaffar Gondal (20)
Dernier
Dernier (20)
Relative motion and relative speed
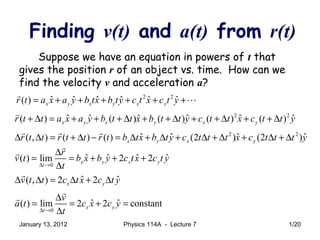
- 1. Finding v(t) and a(t) from r(t) Suppose we have an equation in powers of t that gives the position r of an object vs. time. How can we find the velocity v and acceleration a? 2 2 ˆ ˆ ˆ ˆ ˆ ˆ( ) x y x y x yr t a x a y b tx b ty c t x c t y= + + + + + + r L 2 2 ˆ ˆ ˆ ˆ ˆ ˆ( ) ( ) ( ) ( ) ( )x y x y x yr t t a x a y b t t x b t t y c t t x c t t y+ ∆ = + + + ∆ + + ∆ + + ∆ + + ∆ r 2 2 ˆ ˆ ˆ ˆ( , ) ( ) ( ) (2 ) (2 )x y x yr t t r t t r t b tx b ty c t t t x c t t t y∆ ∆ = + ∆ − = ∆ + ∆ + ∆ + ∆ + ∆ + ∆ r r r 0 ˆ ˆ ˆ ˆ( ) lim 2 2x y x y t r v t b x b y c tx c t y t∆ → ∆ = = + + + ∆ r r ˆ ˆ( , ) 2 2x yv t t c tx c t y∆ ∆ = ∆ + ∆ r 0 ˆ ˆ( ) lim 2 2 constantx y t v a t c x c y t∆ → ∆ = = + = ∆ r r January 13, 2012 1/20Physics 114A - Lecture 7
- 2. Vector Motion with Constant Acceleration Average velocity: 1 02 ( )avv v v= + r r r 1 0 0 02 ( ) ( )avr t r v t r v v t= + = + + r r r r r r 1 2 0 0 2 ( )r t r v t at= + + r r r r Position as a function of time: Velocity as a function of time: 0( )v t v at= + r r r January 13, 2012 2/20Physics 114A - Lecture 7
- 3. Graphs of x-y and v-t t (s) x (m) y (m) v (m/s) 0 0 5 5.0 1 2 10 6.4 2 8 15 9.4 3 18 20 13.0 4 32 25 16.8 2 2 2 2 ; 4 / (5 5) ; 5 / x y x y x t m v t m s y t m v m s v v v = = = + = = + January 13, 2012 3/20Physics 114A - Lecture 7
- 4. Clicker Question 1 Which of the blue position vs. time graphs goes with this green velocity vs. time graph? The particle’s position at ti = 0 s is xi = −10 m. January 13, 2012 4/20Physics 114A - Lecture 7
- 5. Relative Motion Definition: An Inertial Reference Frame is any coordinate system (or frame of reference) that is either at rest or moving in some direction with a constant velocity. Example: a train or airplane moving forward with a constant speed. January 13, 2012 5/20Physics 114A - Lecture 7
- 6. Relative Motion The speed of the passenger with respect to the ground depends on the relative directions of the passenger’s and train’s speeds: vgnd = 16.2 m/s vgnd = 13.8 m/s January 13, 2012 6/20Physics 114A - Lecture 7
- 7. Relative Motion This also works in two dimensions: January 13, 2012 7/20Physics 114A - Lecture 7
- 8. Relative Motion Amy, Bill, and Carlos all measure the velocity of the runner and the acceleration of the jet plane. The green velocity vectors are shown in Amy’s reference frame. What is the runner’s velocity? It depends on the frame of the observer. Amy: vR = 5 m/s Bill: vR = 0 m/s Carlos: vR =−10 m/s What about aplane? January 13, 2012 8/20Physics 114A - Lecture 7
- 9. Relative Position ' ' ; ' ; r r R r Vt r r R r Vt = + = + = − = − r rr r r r rr r r ' ; ' ; ' ; ' ; x x y y x x V t x x V t y y V t y y V t = + = − = + = − The position depends on the frame. A set of position observations in one frame can be transformed to get equivalent observations in another frame. January 13, 2012 9/20Physics 114A - Lecture 7
- 10. Relative Velocity pB pA ABv v v= + r r r pG pC CGv v v= + r r r A z x y B y’ z’ x’ vAB vpA The velocity also depends on the frame. A set of velocity observations in one frame can be transformed to get equivalent observations in another frame. January 13, 2012 10/20Physics 114A - Lecture 7
- 11. Example: Flying a Plane pG pA AGv v v= + r r r A pilot wishes to fly a plane due north relative to the ground. The airspeed of the plane is 200 km/h, and the wind is blowing from west to east at 90 km/h. (a) In which direction should the plane head? (b) What will be the ground speed of the plane? (90 km/h) arcsin arcsin 26.7 west of north (200 km/h) AG pA v v θ = = = ° 2 2 2 2 (200 km/h) (90 km/h) 179 km/hpG pA AGv v v= − = − = January 13, 2012 11/20Physics 114A - Lecture 7
- 12. Example: Crossing a River You are riding in a boat with a speed relative to the water of vbw = 6.1 m/s. The boat points at an angle of θ = 25° upstream on a river flowing at vwg = 1.4 m/s. (a) What is your speed vbg and angle θbg relative to the ground? bg bw wgv v v= + r r r ˆ( 1.4 m/s)wgv y= − r ˆ ˆ(6.1 m/s)cos25 (6.1 m/s)sin 25 ˆ ˆ(5.5 m/s) (2.6 m/s) bwv x y x y = ° + ° = + r ˆ ˆ(5.5 m/s) (2.6 m/s 1.4 m/s) ˆ ˆ(5.5 m/s) (1.2 m/s) bgv x y x y = + − = + r 2 2 (5.5 m/s) (1.2 m/s) 5.6 m/sbgv = + = [ ]1 tan (1.2 m/s) / (5.5 m/s) 12bgθ − = = ° January 13, 2012 12/20Physics 114A - Lecture 7
- 13. Example: A Ball Toss Mike throws a ball upward at a 630 angle with a speed of 22 m/s. Nancy rides past Mike on her bicycle at 10 m/s at the instant he releases the ball. (a) What trajectory does Mike see? (b) What trajectory does Nancy see? 0 0 0 0 0 0 0 1 2 2 0 0 0 02 max Mike: cos (22 m/s)cos 63 =10.0 m/s; sin (22 m/s)sin 63 =19.6 m/s; ( ) 10.0 m; ( ) ( ) (19.6 - 4.9 ) m; =19.6 m at 2 s and 0 at 4 s. x y x y v v v v x x v t t t y y v t t g t t t t y t y t θ θ = = ° = = ° = + − = = + − − − = = → = Nancy: ' (10.0 -10.0 )m = 0 m; ' ; Therefore, the ball rises and falls vertically and Mike moves backward at 10 m/s. x y x x V t t t y y V t y = − = = − = January 13, 2012 13/20Physics 114A - Lecture 7
- 14. The Object and Frame Velocities Add Vectorially January 13, 2012 14/20Physics 114A - Lecture 7
- 15. Consider how the acceleration transforms from frame S to frame S’, an inertial frame that is moving with constant velocity V relative to S. An “inertial frame” is defined to be any reference frame that is at rest or moving with a constant velocity. Velocities add, so Galilean Relativity ' ' ; 0; ' ' ' v v V v v v V t t t t v v a a t t a a ∆ ∆ ∆ ∆ = + = + = + ∆ ∆ ∆ ∆ ∆ ∆ = = = ∆ ∆ = rr r rrr r r r r r r r Galilean Relativity: While position and velocity are frame- dependent, acceleration is observed to be the same in all inertial reference frames. January 13, 2012 15/20Physics 114A - Lecture 7
- 16. Galileo vs. Einstein The laser beam moves along the x axis away from Tom at the speed of light, vx = 3 x 108 m/s. Sue flies by in her space ship, moving along the x axis at Vx = 2 x 108 m/s. From her point of view, how fast is the laser beam moving? Galileo: vx’ = vx – Vx = 1 x 108 m/s Einstein: vx’ = vx = 3 x 108 m/s Velocity transformations are valid in all inertial reference frames. The speed of light is the same in all inertial reference frames. January 13, 2012 16/20Physics 114A - Lecture 7
- 17. Before the next lecture on Tuesday, read Walker, Chapter 4.1 and 4.2 Homework Assignments #1 is now due at 11:59 PM on Tuesday, January 17. Homework Assignments #2 is still due at 11:59 PM on Thursday, January 19. No class on Monday due to the MLK Holiday. We will have Exam 1 on Friday, January 20. Send seat requests, if you have not already done so. End of Lecture 7