ROBOT ATLAS
•Télécharger en tant que PPTX, PDF•
0 j'aime•495 vues

Robot Atlas es un robot humanoide bípedo desarrollado por Boston Dynamics para realizar tareas de búsqueda y rescate, como atravesar terrenos difíciles y mantener el equilibrio en una pierna. Está construido con aluminio y titanio, iluminado con LED azules, y equipado con sistemas de visión, láser y cámaras estéreo controladas por una computadora a bordo para navegar terrenos irregulares de forma independiente.

Recommandé
Contenu connexe
En vedette
Similaire à ROBOT ATLAS
Similaire à ROBOT ATLAS (20)
Dernier
Dernier (20)
ROBOT ATLAS
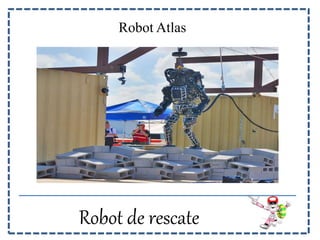
- 1. Robot Atlas Robot de rescate
- 2. Robot Atlas Es un robot humanoide bípedo desarrollado por la compañía norteamericana de robótica Boston Dynamics, con el financiamiento y la supervisión de DARPA (agencia del Departamento de Defensa de Estados Unidos). Está diseñado para una variedad de tareas de búsqueda y rescate, capaz de atravesar terrenos difíciles y mantener el equilibrio sobre una pierna, incluso cuando lo golpean de un lado. Se dio a conocer al público el 11 de julio de 2013. Robot de rescate
- 3. Robot Atlas Construido en aluminio de grado aeronáutico y titanio. Tiene cuatro extremidades accionadas hidráulicamente. Se ilumina con LEDs azules. Robot de rescate
- 4. Robot Atlas Está equipado con dos sistemas de visión, un telémetro láser y cámaras estéreo, ambos controlados por un ordenador a bordo. Tiene las manos con las capacidades motrices finas. Sus extremidades poseen un total de 28 grados de libertad. Puede navegar terrenos irregulares y subir de forma independiente con sus brazos y piernas. Robot de rescate
- 5. Robot Atlas Está equipado con dos sistemas de visión, un telémetro láser y cámaras estéreo, ambos controlados por un ordenador a bordo. Tiene las manos con las capacidades motrices finas. Sus extremidades poseen un total de 28 grados de libertad. Puede navegar terrenos irregulares y subir de forma independiente con sus brazos y piernas. Robot de rescate
- 8. Robot Atlas Robot de rescate
- 9. Robot Atlas Robot de rescate