Controlar motor dc com Arduino
•
1 j'aime•1,951 vues

http://arduinoescola.blogspot.pt/2016/03/motores-dc-arduino-e-s4a-estudo.html

Recommandé
Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Controlar motor dc com Arduino
Similaire à Controlar motor dc com Arduino (20)
Plus de Ana Carneirinho
Plus de Ana Carneirinho (20)
Dernier
Dernier (20)
Controlar motor dc com Arduino
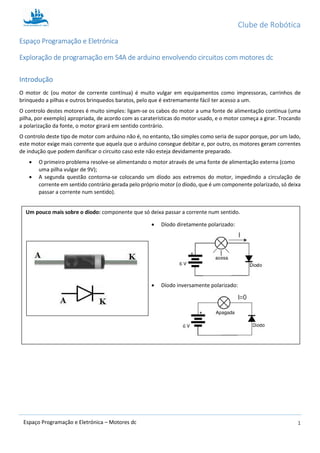
- 1. Clube de Robótica 1Espaço Programação e Eletrónica – Motores dc Espaço Programação e Eletrónica Motores dc em circuitos com arduino programado em S4A – estudo orientado Introdução O motor dc (ou motor de corrente contínua) é muito vulgar em equipamentos como impressoras, carrinhos de brinquedo a pilhas e outros brinquedos baratos, pelo que é extremamente fácil ter acesso a um. O controlo destes motores é muito simples: ligam-se os cabos do motor a uma fonte de alimentação contínua (uma pilha, por exemplo) apropriada, de acordo com as caraterísticas do motor usado, e o motor começa a girar. Trocando a polarização da fonte, o motor girará em sentido contrário. O controlo deste tipo de motor com arduino não é, no entanto, tão simples como seria de supor porque, por um lado, este motor exige mais corrente que aquela que o arduino consegue debitar e, por outro, os motores geram correntes de indução que podem danificar o circuito caso este não esteja devidamente preparado. O primeiro problema resolve-se alimentando o motor através de uma fonte de alimentação externa (como uma pilha vulgar de 9V); A segunda questão contorna-se colocando um díodo aos extremos do motor, impedindo a circulação de corrente em sentido contrário gerada pelo próprio motor (o díodo, que é um componente polarizado, só deixa passar a corrente num sentido). Um pouco mais sobre o díodo: componente que só deixa passar a corrente num sentido. Díodo diretamente polarizado: Díodo inversamente polarizado:
- 2. Clube de Robótica 2Espaço Programação e Eletrónica – Motores dc O controlo de motor começará por ser feito através de um transístor bipolar, cuja base será ligada a uma saída PWM do arduino. Um pouco mais sobre o transístor bipolar: A sua função é permitir a passagem de corrente entre dois pinos (coletor e emissor) quando um terceiro (base) é ativado. O funcionamento de um transístor pode ser comparado ao de uma torneira de monocomando que, ao ser aberta, deixa passar a água sempre num único sentido. Funcionamento de um transístor bipolar: TIP 120: Como transístor, será usado o TIP 120 que, na realidade, é composto por dois transístores (numa configuração chamada Darlington). Seguem a pinagem e o circuito equivalente deste componente.
- 3. Clube de Robótica 3Espaço Programação e Eletrónica – Motores dc Exercício 1 – Funcionamento básico do motor dc Objetivo: Controlar a velocidade de um motor dc através de uma saída PWM. Material a utilizar: Arduino, breadboard, Motor dc, 1 resistências 220 Ω, 1 resistência 10 kΩ, TIP 120, um díodo 1N4007, fonte de alimentação externa (pilha), resistência variável 10 kΩ, interruptor de pressão, fios. Entradas / saídas do Arduino a utilizar: 1 saída PWM, 1 entrada digital, 1 entrada analógica 1.1. Efetuar a seguinte ligação: 1.1.1. No S4A, alterar o valor da saída D9 para vários valores entre 0 e 255. O que se observa? 1.1.2. Acrescentar ao circuito anterior uma resistência variável, ligá-la a uma entrada analógica, e controlar a partir dessa resistência a velocidade do motor. 1.1.3. Acrescentar ao circuito montado em 1.1.2. um botão de pressão, de forma a que o motor só rode se o botão estiver premido. 1.1.4. Alterar o programa anterior de forma a ligar o motor premindo o botão de pressão; nova atuação no botão, deve desligar o motor. 1.1.5. Se se trocar a posição dos fios do motor, invertendo a sua polarização, o que se observa?
- 4. Clube de Robótica 4Espaço Programação e Eletrónica – Motores dc Exercício 2 – Utilizar o driver L293D para controlar o motor dc Objetivo: Controlar o sentido de rotação do motor dc através do driver L293D. Material a utilizar: Arduino, breadboard, Motor dc, L293D, 2 resistências 10 kΩ, 2 botões de pressão, fios. Entradas / saídas do Arduino a utilizar: 2 entradas digitais, 2 saídas PWM 2.1. Efetuar a seguinte ligação, ligando os pinos 2 e 7 às entradas digitais PWM 6 e 9. Um pouco mais sobre o driver L293D: À medida se constrói circuitos mais complicados, é aconselhável começar a utilizar circuitos integrados (CI), que mais não são que circuitos miniaturizados e encapsulados, “prontos a utilizar”. Para saber o que faz um CI, há que identificá-lo a partir da sua referência e procurar a sua datasheet (documento que apresenta de forma resumida todos os seus dados e características) internet. No caso do L293D, e de acordo com a sua datasheet (http://www.ti.com/lit/ds/symlink/l293.pdf) a sua pinagem é a seguinte: O seu circuito interno permite o controlo de vários tipos e número de motores. No nosso caso, controlaremos apenas a direção de 1 motor dc, mas é possível encontrar muitos outros circuitos que apliquem este integrado.
- 5. Clube de Robótica 5Espaço Programação e Eletrónica – Motores dc 2.2. Acrescentar ao circuito anterior dois botões de pressão e ligá-los às entradas digitais D2 e D3. 2.3. Programar o circuito de forma a que o motor rode para um lado quando se usa um dos interruptores e que rode para outro quando se usa o segundo interruptor. Premir duas vezes o mesmo interruptor, deve fazer parar o motor. Premindo os dois botões em simultâneo deve também fazer parar o motor. ----------------------------------------------------------------------------------------------------------------------------------------------------------- Algumas soluções: 1.1.1. O motor adquire vários valores de velocidade. 1.1.2. 1.1.3. 1.1.4. 1.1.5. O motor inverte o sentido de rotação
- 6. Clube de Robótica 6Espaço Programação e Eletrónica – Motores dc 2.3