

Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Ch¦+ng v
Similaire à Ch¦+ng v (13)
Plus de Ttx Love
Plus de Ttx Love (20)
Ch¦+ng v
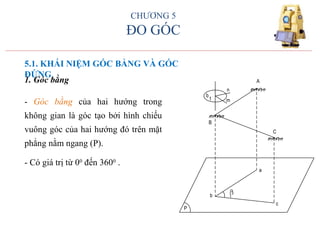
- 1. CHƯƠNG 5 ĐO GÓC 5.1. KHÁI NIỆM GÓC BẰNG VÀ GÓC ĐỨNG 1. Góc bằng n m b 1 A b a c P B C - Góc bằng của hai hướng trong không gian là góc tạo bởi hình chiếu vuông góc của hai hướng đó trên mặt phẳng nằm ngang (P). - Có giá trị từ 00 đến 3600 .
- 2. CHƯƠNG 5 ĐO GÓC 2. Góc đứng (P) D©y däi A B J +V -V A B AZ BZ - Góc đứng (hay còn gọi là góc nghiêng) của một hướng ngắm nào đó là góc tạo bởi hướng ngắm và mặt phẳng nằm ngang (P) đi qua điểm đó. Ký hiệu là V và có giá trị từ 00 đến 900. - Góc hợp bởi hướng thiên đỉnh của phương dây dọi với hướng ngắm gọi là góc thiên đỉnh được ký hiệu là Z . Z + V = 900
- 3. CHƯƠNG 5 ĐO GÓC 5.2. CẤU TẠO MÁY KINH VĨ 1. Nguyên lý cấu tạo máy kinh vĩ - Ống kính: Dùng để xác định hướng đường thẳng và bắt mục tiêu Bµn ®é ®øng Gãc ®øng Bµn ®é ngang Gãc b»ng Trôc ®øngTrô c nga ng Trôc ng¾ m - Bàn độ ngang được làm bằng thủy tinh có dạng hình vành khăn, trên có các vạch chia độ liên tục từ 00 đến 3600 hoặc 0gr đến 400gr. - Bàn độ đứng có dạng hình vành khăn được lắp vào trục quay ống kính.
- 4. CHƯƠNG 5 ĐO GÓC 2. Các bộ phận chính của máy kinh vĩ
- 5. CHƯƠNG 5 ĐO GÓC 5.4. NHỮNG THAO TÁC CƠ BẢN TRÊN MỘT TRẠM MÁY 1. Định tâm máy a. Đặt giá ba chân b. Đặt máy lên giá 2. Cân máy 1 3 2 1 2 3 a. Cân máy sơ bộ b. Cân máy chính xác 3. Thao tác ngắm
- 6. CHƯƠNG 5 ĐO GÓC 5.6. PHƯƠNG PHÁP ĐO GÓC BẰNG PHƯƠNG PHÁP ĐO GÓC ĐƠN 0 0 a b a b A B 1 1 2 2 β - Phương pháp này thường áp dụng để đo góc bằng tại một trạm đo có hai hướng. * Cách đo như sau:a. Vị trí thuận Giá trị góc AOB của nửa lần đo thuận kính: β1 = b1 – a1 β 1 A B
- 7. CHƯƠNG 5 ĐO GÓC c. Kiểm tra - Nếu β1 - β2 > ± 2t (t là độ chính xác của máy) thì phải đo lại - Nếu β1 - β2 ≤ ± 2t thì giá trị góc AOB một lần đo được tính theo công thức: 2 )()( 2 221121 abab −+− = + = ββ β b. Vị trí đảo Giá trị góc AOB của nửa lần đo đảo kính: β2 = b2 – a2 β2 A Chiều quay máy
- 8. §iÓ m ®Æt m¸y §iÓ m ng¾ m VÞ trÝ bµn ®é Sè ®äc trªn bµn ®é ngang TrÞ sè gãc nöa lÇn ®o Δβ Gãc ®o Ph¸c häa I A TR 250 36’40” 840 21’35” 0’25” 840 21’22” B 1090 57’15” B PH 2890 57’40” 840 21’10” A 2050 36’30” CHƯƠNG 5 ĐO GÓC SỔ KẾT QUẢ ĐO GÓC
- 9. CHƯƠNG 5 ĐO GÓC 5.7. CÁC NGUỒN SAI SỐ ĐO GÓC BẰNG 1. Sai số do máy a. Sai số do trục đứng của máy không thẳng đứng. b. Sai số do trục ngắm không vuông góc với trục quay ống kính ( sai số 2C). c. Sai số do bàn độ khắc vạch không đều. 2. Sai số do người đo a. Sai số ngắm b. Sai số đọc số 3. Sai số do lệch tâm máy 4. Sai số lệch tâm tiêu ngắm 5. Sai số do điều kiện ngoại cảnh
- 10. CHƯƠNG 5 ĐO GÓC 5.9. PHƯƠNG PHÁP ĐO GÓC ĐỨNG 1. Cấu tạo bàn độ đứng 0 9 018 0 27 0 0 9 018 0 27 0 00 9 0 9 0 Bàn độ đứng và du xích có cấu tạo và cách đọc số giống như bàn độ ngang chỉ khác nhau ở hai điểm. - Trên bàn độ ngang ghi số liên tục từ 00 đến 3600 theo chiều kim đồng hồ, còn trên bàn độ đứng thì có loại khắc liên tục thuận hay ngược chiều kim đồng hồ, có loại khắc độ không liên tục mà đối xứng từ 00 đến 900 . - Khi đo góc bằng thì phải khóa bàn độ ngang còn du xích quay theo ống kính. Khi đo góc đứng thì ngược lại.
- 11. CHƯƠNG 5 ĐO GÓC Xét cụ thể cấu tạo bàn độ đứng của máy Theo-030 (Đức). Bàn độ đứng khắc từ 00 ÷ 3600 . Khi trục ngắm nằm ngang bọt thủy dài trên du xích nằm ở giữa - Số đọc trên bàn độ đứng ở vị trí thuận kính là 900 , ở vị trí đảo kính là 2700 . Các trị số này gọi là số đọc ban đầu lý thuyết, ký hiệu là MOLT Bµn ®é ®øng Trôc ng¾m n»m ngang èng kÝnh M0TT ε 180 270 0 90 - Trong thực tế không phải lúc nào điều kiện của bàn độ đứng và du xích cũng thỏa mãn vì vậy số đọc ban đầu thực tế (MOTT) khác với (MOLT) một góc ε. MOTT - MOLT = ε
- 12. CHƯƠNG 5 ĐO GÓC 2. Phương pháp xác định MO thực tế (MOTT) Đặt máy kinh vĩ tại một điểm bất kỳ, ngắm điểm A ở hai vị trí bàn độ đứng: a. Vị trí thuận (TR) A MoTT 0 TR V VÞtrÝthuËn kÝnh (TR) MoTT +180 0 MoTT - Quay máy ngắm điểm A, đọc trị số trên bàn độ đứng TR. - A nằm trên mặt phẳng góc đứng dương (+) VTR = MOTT – TR
- 13. CHƯƠNG 5 ĐO GÓC b. Vị trí đảo kính (PH) - Đảo ống kính quay máy 1800 đưa ống kính ngắm điểm A, đọc trị số trên bàn độ đứng là PH. - Khi đảo kính quay máy 1800 trị số MOTT lúc này bằng MOTT + 1800 VPH = PH – (MOTT + 180o ) Vì cả hai vị trí thuận và đảo đều ngắm A nên VTR = VPH. MOTT – TR = PH – (MOTT + 180o )Tức là: 2 180TRPH MO o TT −+ = điều chỉnh MOTT = MOLT PH MoTT oTT M V VÞtrÝ®¶o kÝnh (PH) A +180MoTT 0 0
- 14. CHƯƠNG 5 ĐO GÓC 3. Phương pháp đo góc đứng N Z V A a. Vị trí thuận kính (TR) - Quay máy đưa ống kính lên ngắm điểm N. - Dùng ốc vi động đưa bọt thủy trên du xích bàn độ đứng vào giữa. - Đọc số trên bàn độ đứng TR. b. Vị trí đảo kính (PH) - Đảo ống kính, quay máy 1800 - Đưa ống kính lên ngắm lại điểm N. - Đưa bọt thủy trên du xích bàn độ đứng vào giữa. - Đọc số trên bàn độ đứng là PH.
- 15. CHƯƠNG 5 ĐO GÓC Tính MOTT (số đọc ban đầu thực tế) 2 180o TT PHTR MO −+ = - Tính góc đứng V (vị trí thuận) VTR = MOTT – TR - Tính góc đứng V (vị trí đảo) VPH = PH – (MOTT + 180o ) Góc đứng V được tính 2 )180MO(PH)TRMO( 2 VV V o TTTTPHTR +−+− = + = 2 180TRPH V o −− =