1. METODOLOGÍA DE DISEÑO DE CONTROLADORES
DIGITALES A PARTIR DE CONTROLADORES
CONTINUOS.
A esta metodología de diseño también se le conoce como digitalización (o discretización) de
controladores continuos. La metodología está formado por cinco pasos generales y
básicamente consiste en emplear los algoritmos de discretización ampliamente conocidos
para digitalizar el controlador continuo.
Esta metodología es útil principalmente en sistemas donde ya exista un controlador continuo
funcionando (sistemas de control viejos u obsoletos) o en sistemas nuevos donde se requiera
el diseño de un algoritmo de control digital. Claro está, en sistemas nuevos deberá diseñarse
primero el controlador continuo usando técnicas ya conocidas y posteriormente convertirlo
a discreto. Gran parte de las etapas del diseño se llevan acabo usando una herramienta tipo
CAD tal como Program CC o Matlab con la toolbox de Control y/o de Simulink.
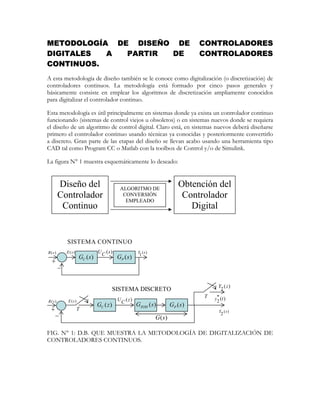
La figura N° 1 muestra esquemáticamente lo deseado:
Diseño del ALGORITMO DE
Obtención del
Controlador CONVERSIÓN
EMPLEADO
Controlador
Continuo Digital
SISTEMA CONTINUO
R(s) E (s) UC (s) Y (s)
1
GC ( s ) GP ( s )
+
−
Y2 ( z )
SISTEMA DISCRETO
T ∗
UC ( z) y (t )
R(s) E (s) 2
GC ( z ) GZOH ( s ) GP ( s )
+ T Y (s)
2
− G (s)
FIG. N° 1: D.B. QUE MUESTRA LA METODOLOGÍA DE DIGITALIZACIÓN DE
CONTROLADORES CONTINUOS.
2. Las propiedades del controlador digital dependen de principalmente de:
El período de muestreo T.
Método de digitalización utilizado.
El objetivo de esta metodología es hallar GC(z) para que Y2(s) ≅ Y1(s).
PASOS PARA DIGITALIZAR UN CONTROLADOR
CONTINUO.
PASO 1:
Verificar el funcionamiento satisfactorio del sistema continuo modificado, usando una
herramienta tipo CAD, tal como Program CC o Matlab:
SISTEMA CONTINUO MODIFICADO
R(s) E (s) UC (s) Y (s)
1
GC ( s ) GZOH ( s ) GP ( s )
+
−
FIG. N° 2: Sistema analógico modificado a ser verificado para prever el impacto causado por
el muestreo.
GZOH(s) puede ser aproximado usando PADE. Si es necesario se corrige GC(s).
PASO 2:
Discretizar GC(s) aplicando algún método conocido a fin de hallar GC(z). Los métodos más
empleados que estudiaremos aquí son:
Diferenciación hacia adelante o derivada posterior (Forward rectangle).
Diferenciación hacia atrás o derivada anterior(Backward rentangle).
Transformación bilineal o Tustin.
Tustin con predoblamiento de frecuencia (Tustin with prewarping).
Mapeo de polos y ceros (Pole Zero Map).
3. Transformada Z.
Mantenedor de orden zero.
Mantenedor de primer orden.
Integración rectangular hacia delante.
Integración rectangular hacia atrás.
PASO 3:
Discretizar la planta, GP(s), usando el ZOH para hallar G(z).
PASO 4:
Verificar El funcionamiento satisfactorio del sistema discreto usando una herramienta tipo
CAD, tal como Program CC v5.0 o Matlab 6.0.
PASO 5:
Implementar GC(z) usando:
Algoritmo numérico (E.E.D.L.).
Hardware: DSP, PC, PLC, DCS, SCADA.
Especial cuidado debe tenerse al elegir el algoritmo numérico y el hardware más adecuado.
Esta elección básicamente responde a lo siguiente:
Costo.
Poder de cómputo de los dispositivos de hardware.
Aplicabilidad.
Ahora desarrollaremos los métodos que se más se emplean:
MÉTODO DE LA DIFERENCIA HACIA DELANTE O
DERIVADA POSTERIOR.
El método consiste en aproximar la derivada del error mediante una función en diferencia
hacia adelante. Sea x(t) la derivada del error y X(s) la transformada de Laplace de la derivada
del error, con lo cual se tiene que:
4. de(t )
x(t ) = ⇔ X ( s ) = SE ( s ) (1.1)
dt
La pendiente de e(t) en t = [(k+1)T] se aproxima a la pendiente de la línea recta entre e(kT) y
e[(k+1)T]. Permita que la derivada numérica de e(t) en t = [(k+1)T] sea x(kT), entonces se
tiene que:
de(t ) e ( k + 1) T − e ( kT )
x(t ) = x(kT ) = ≅ (1.2)
dt T
(1.2) representa la E.E.D.L. del algoritmo de control. Aplicando T.Z. a (1.2) tenemos:
e [ (k + 1)T ] − e ( kT )
X ( z ) = Ζ [ SE ( s ) ] = Ζ (1.3)
T
Z −1
X ( z) = E( z) (1.4)
T
La expresión (1.4) permite obtener la F.T. del controlador digital a partir del controlador
continuo de la siguiente forma:
GC ( z ) = GC ( s ) S = Z −1 (1.5)
T
e(t )
e[(k + 1)T ]
e(kT )
kT [(k + 1)T ] t
FIG. N° 3: Explicación gráfica del método de la derivada posterior.
MÉTODO DE LA DIFERENCIA HACIA ATRÁS O
DERIVADA ANTERIOR.
El método consiste en aproximar la derivada del error mediante una función en diferencia
hacia atrás. Sea x(t) la derivada del error y X(s) la transformada de Laplace de la derivada del
error, con lo cual se tiene que:
de(t )
x(t ) = ⇔ X ( s) = SE ( s ) (1.6)
dt
5. La pendiente de e(t) en t = kT se aproxima a la pendiente de la línea recta entre e[(k-1)T] y
e(kT). Permita que la derivada numérica de e(t) en t = kT sea x(kT), entonces se tiene que:
de(t ) e ( kT ) − e ( k − 1) T
x(t ) = x(kT ) = ≅ (1.7)
dt kT − [(k − 1)T ]
(1.7) representa la E.E.D.L. del algoritmo de control. Aplicando T.Z. a (1.7) tenemos:
e ( kT ) − e [ (k − 1)T ]
X ( z ) = Ζ [ SE ( s ) ] = Ζ (1.8)
T
Z −1
X ( z) = E( z) (1.9)
TZ
La expresión (1.9) permite obtener la F.T. del controlador digital a partir del controlador
continuo de la siguiente forma:
GC ( z ) = GC ( s ) S = Z −1 (1.10)
TZ
e(t )
e(kT )
e[(k − 1)T ]
[(k − 1)T ] kT t
FIG. N° 4: Explicación gráfica del método de Tustin.
En esencia lo expresado en (1.3) y (1.8) está en función de la pendiente de una recta tangente
a una curva dada en un punto, lo cual es el concepto geométrico de la derivada.
MÉTODO DE LA TRANSFORMACIÓN BILINEAL O DE
TUSTIN.
A este método también se le conoce como Integración Trapezoidal. El método consiste en
aproximar la integral del error mediante sumas de áreas de trapezoides. Estas sumas se
pueden expresar mediante una función en diferencia.
Sea x(t) la integral del error y X(s) la transformada de Laplace de la integral del error, con lo
cual se tiene que
6. t
E ( s)
x(t ) = ∫ e(t )dt ⇔ X ( s ) = (1.11)
0
S
El valor de la integral en t = kT es igual al valor en t = [(k-1)T] más el área adicionada desde
[(k-1)T] hasta kT. El área que se adiciona es el área del trapezoide que se resalta en la figura
6. Permita que x[(k-1)T] sea la integral numérica de e[(k-1)T], con lo cual se tiene que:
t
e ( kT ) + e ( k − 1) T
x(t ) ≅ x(kT ) = ∫ e(t )dt = x [ (k − 1)T ] + [ kT − (k − 1)T ] (1.12)
0
2
(1.12) representa la E.E.D.L. del algoritmo de control. Aplicando T.Z. a (1.12) tenemos:
E ( s) e ( kT ) + e ( k − 1) T
T
X ( z) = Ζ = Ζ x ( k − 1) T +
(1.13)
S
2
T Z +1
X ( z) = E( z) (1.14)
2 Z −1
La expresión (1.14) permite obtener la F.T. del controlador digital a partir del controlador
continuo de la siguiente forma:
GC ( z ) = GC ( s ) S = 2 Z −1 (1.15)
T Z +1
En esencia lo expresado en (1.13) está en función de áreas de trapecios.
e(t )
e(kT )
e[(k − 1)T ]
[(k − 1)T ] kT t
FIG. N° 6: Explicación gráfica del método de Tustin.
MÉTODO DE TUSTIN CON PREDOBLAMIENTO DE
FRECUENCIA.
Se deja al estudiante para que lo investigue.
7. MÉTODO DEL MAPEO DE POLOS Y CEROS.
Se deja al estudiante para que lo investigue
MÉTODO DE LA TRANSFORMADA Z.
El método consiste en hallar la T.Z. de la transformada inversa muestreada de Laplace del
controlador continuo G(s).
GC ( z ) = Z ∫ −1 ( GC ( s ) )
*
(1.16)
E ( s) U C ( s) E *( s ) UC ( z)
GC ( s ) GC ( z )
T
FIG. N° 9: Explicación gráfica del método de la T.Z.
En caso de que se presente Aliasing la solución es un filtro analógico. En algunas ocasiones
se requiere rediseñar GC(s).
{
GC ( z ) = Z ∫ −1 GC1 ( s )
*
} (1.17)
E ( s) U C (s)
GF ( s) GC ( s )
T
GC1 (s)
FIG. N° 10: Explicación gráfica del método de la T.Z. cuando se presenta Aliasing.
MÉTODO DEL MANTENEDOR DE ORDEN ZERO.
El método consiste en hallar la T.Z. del conjunto mantenedor controlador:
G ( s)
GC ( z ) = Z [GZOH ( s )GC ( s ) ] = (1 − Z −1 ) Z C (1.18)
S
E ( s) U C ( s) E *( s ) UC ( z)
GZOH ( s ) GC ( s ) GC ( z )
T
FIG. N° 11: Explicación gráfica del método del mantenedor de orden cero.
8. MÉTODO DEL MANTENEDOR DE PRIMER ORDEN.
El método consiste en hallar la T.Z. del conjunto mantenedor controlador:
(TS + 1)GC ( s )
GC ( z ) = Z [GFOH ( s )GC ( s ) ] = (1 − Z −1 ) 2 Z (1.19)
TS 2
E ( s) U C ( s) E *( s ) UC ( z)
GFOH ( s ) GC ( s ) GC ( z )
T
FIG. N° 12: Explicación gráfica del método del mantenedor de primer orden.
MÉTODO DE INTEGRACIÓN RECTANGULAR HACIA
ADELANTE
En esencia este método consiste en aproximar la integral del error mediante sumas de áreas
de rectángulos.
Basados en la figura 13 se sabe que el valor de la integral en t = [(k+1)T] es igual al valor en t
= kT más el área adicionada desde kT hasta [(k+1)T]. Permita que x(kT) sea la integral
numérica de e(kT), con lo cual se tiene que:
x ( k + 1) T = x ( kT ) + e [ (k + 1)T ] ∗ [ (k + 1)T − kT ]
(1.20)
x[(k + 1)T ] = x ( kT ) + e[(k + 1)T ]* T (1.21)
(1.21) es la E.E.D.L del algoritmo de control. Aplicando T.Z. a (1.21) tenemos:
TZ
X ( z) = E( z) (1.22)
Z −1
TZ
GCI = (1.23)
Z −1
e(t )
e(kT )
e[(k + 1)T ]
t
kT [(k + 1)T ]
FIG. N° 13: Explicación gráfica del método de integración rectangular hacia adelante.
9. MÉTODO DE INTEGRACIÓN RECTANGULAR HACIA
ATRÁS
En esencia este método consiste en aproximar la integral del error mediante sumas de áreas
de rectángulos.
Basados en la figura 14 se sabe que el valor de la integral en t = kT es igual al valor en t =
[(k-1)T] más el área adicionada desde [(k-1)T] hasta KT. Permita que x[(k-1)T] sea la integral
numérica de e[(k-1)T], con lo cual se tiene que:
x(kT ) = x [ (k − 1)T ] + e [ (k − 1)T ] ∗ [ kT − (k − 1)T ] (1.24)
x(kT ) = x[(k − 1)T ] + e[(k − 1)T ]* T (1.25)
(1.25) es la E.E.D.L del algoritmo de control. Aplicando T.Z. a (1.25) tenemos:
T
X ( z) = E( z) (1.26)
Z −1
T
GCI ( z ) = (1.27)
Z −1
e(t )
e[(k − 1)T ] e(kT )
t
[(k − 1)T ] kT
FIG. N° 14: Explicación gráfica del método de integración rectangular hacia atrás.
DIGITALIZACIÓN DE CONTROLADORES PID
CONTINUOS.
La ecuación integro diferencial estándar del controlador continuo PID es:
1
b
de(t )
uC (t ) = K e(t ) + ∫ e(t )dt + TD (1.28)
TI a dt
Aquí K es la ganancia proporcional, TI es el tiempo integral y TD es el tiempo derivativo.
10. Aplicando T.L. a (1.28) y despejando la F.T. se tiene que:
U C (s) 1
GC ( s ) = = K 1 + + TD S (1.29)
E ( s) TI S
En (1.29) las tres constantes K, TI y TD definen el control y GC(s) es la F.T. del controlador
continuo PID en el dominio S.
Una manera típica como se suele expresar la F.T. del controlador continuo PID es:
KI
GC ( s ) = K P + + KDS (1.30)
S
Aquí KP representa la constante proporcional, KI representa la constante integral y KD
representa la constante derivativa.
En (1.30) las tres constantes KP, TI y TD definen el control.
Observando (1.28) tenemos:
La parte proporcional:
uCP (t ) = Ke(t ) (1.31)
La parte integral:
b
K
TI ∫
uCI (t ) = e(t )dt (1.32)
a
La parte derivativa:
de(t )
uCD (t ) = KTD (1.33)
dt
La figura 15 muestra la manera como actúan cada una de las partes de un controlador
continuo PID en un determinado sistema de control continuo.
11. Controlador PID
uCP (t )
KP
+
R( s) E ( s) KI uCI (t ) U C (s) Y (s)
+ GP ( s )
+ S
− +
K D S uCD (t )
H ( s)
FIG. N° 15: D.B. típico de un sistema de control que usa un controlador continuo PID.
La aproximación de los términos de control planteados en las ecuaciones (1.31), (1.32) y
(1.33) mediante una ecuación algebraica que pueda ser implementada en una computadora
digital, se puede hacer aplicando a (1.30) las diferentes técnicas de aproximación numérica
antes citadas. De acuerdo a esto se tiene lo siguiente:
PID DISCRETO A PARTIR DE LA DERIVADA POSTERIOR
Aplicando (1.5) a (1.30) tenemos que:
K ID
GC ( z ) = K PD + + K DD ( Z − 1) (1.34)
Z −1
Donde:
KPD = KP y representa la constante proporcional discreta.
KID = KIT y representa la constante integral discreta.
KDD = KD/T y representa la constante derivativa discreta.
PID DISCRETO A PARTIR DE LA DERIVADA ANTERIOR
Aplicando (1.10) a (1.30) tenemos que:
Z Z −1
GC ( z ) = K PD + K ID + K DD (1.35)
Z −1 Z
Donde:
KPD = KP y representa la constante proporcional discreta.
12. KID = KIT y representa la constante integral discreta.
KDD = KD/T y representa la constante derivativa discreta.
PID DISCRETO A PARTIR DE LA TRANSFORMACIÓN
BILINEAL
Aplicando (1.15) a (1.30) tenemos que:
K ID ( Z + 1) K DD ( Z − 1)
GC ( z ) = K PD + + (1.36)
( Z − 1) ( Z + 1)
Donde:
KPD = KP y representa la constante proporcional discreta.
KID = KIT/2 y representa la constante integral discreta.
KDD = 2KD/T y representa la constante derivativa discreta.
PID DISCRETO A PARTIR DE LA INTEGRACIÓN
RECTANGULAR HACIA ADELANTE
Aplicando (1.23) a (1.30) se obtienen los mismos resultados que se obtuvieron en (1.35)
PID DISCRETO A PARTIR DE LA INTEGRACIÓN
RECTANGULAR HACIA ATRÁS
Aplicando (1.27) a (1.30) se obtienen los mismos resultados que se obtuvieron en (1.34)
Por lo general se usan combinaciones de los métodos de integración y diferenciación para
digitalizar el algoritmo continuo PID. Estas combinaciones se basan en usar la aproximación
de la derivada del error para el término derivativo y la aproximación de la integral del error o
Tustin para el término integral. La idea es usar las técnicas de aproximación numérica donde
mejor apliquen. Si el controlador continuo tiene acción integral se usarán los métodos de
integración rectangular y/o trapezoidal según se desee. Si el controlador continuo tiene
acción derivativa se usarán los métodos de diferenciación según se desee. Si el controlador
continuo tiene ambas acciones (integral y derivativa) se usarán ambos métodos, es decir, la
13. parte integral será tratada con los métodos de integración y la parte derivativa será tratada
con los métodos de diferenciación. En base a esto se tiene lo siguiente:
PID DISCRETO A PARTIR DE LOS MÉTODOS:
INTEGRACIÓN TRAPEZOIDAL + DERIVADA ANTERIOR
T ( Z + 1) TD ( Z − 1)
GC ( z ) = K 1 + + (1.37)
2TI ( Z − 1) TZ
Z +1 Z −1
GC ( z ) = K PD + K ID + K DD (1.38)
Z −1 Z
Donde:
KPD = K = KP.
KID = KT/(2TI) = KIT/2
KDD = KTD/T = KD/T
(1.38) puede ser escrita, mediante arreglo algebraico, de la siguiente manera:
T TZ T ( Z − 1)
GC ( z ) = K 1 − + + D (1.39)
2TI TI ( Z − 1) TZ
Z Z −1
GC ( z ) = K PD + K ID + K DD (1.40)
Z −1 Z
Donde:
KPD = K- [KT/(2TI)] = KP – KIT/2 = KP – KID/2.
KID = KT/TI = KIT.
KDD = KTD/T = KD/T.
A (1.40) se le conoce comúnmente como ALGORITMO DE POSICIÓN o FORMA
POSICIONAL del esquema de control digital PID.
Otra forma comúnmente usada en los esquemas de control digital PID es conocida como
ALGORITMO DE VELOCIDAD o FORMA DE VELOCIDAD del esquema de
control digital PID. Para este esquema no es posible obtener una F.T. como tal, sino que la
salida del controlador se expresa como:
14. Z Z −1
U C ( z ) = − K PDY ( z ) + K ID [ R( z ) − Y ( z )] − K DD
Y ( z) (1.41)
Z −1 Z
La figura N° 15 muestra el D.B. del algoritmo de velocidad para el controlador PID discreto.
R( z ) E ( z) Z UC ( z) Y ( z)
K ID G( z)
Z −1 +
+ −
−
+ +
K DD
K PD
Z −1
Z
FIG. N° 15: D.B. que muestra la implementación del algoritmo de velocidad PID.
QUE SIGNIFICA ALGORITMO DE CONTROL DE
POSICIÓN O DE VELOCIDAD?.
La figura 16 muestra un esquema típico de control digital en el cual se controla el
servomotor de una válvula analítica. Para definir el algoritmo de posición o el algoritmo de
velocidad nos basaremos en esta figura.
Computador
Valor Señal de
Deseado error
Controlador Control Servomotor
+ Variable
− Controlada
Proceso
Variable Manipulada
FIG. N° 16: D.B. que muestra un esquema típico de control digital.
15. ALGORITMO DE POSICIÓN:
En este algoritmo la salida de control no depende de la posición actual de la válvula.
Ejemplo:
Salida deseada = 30%
Salida actual = X (no importa)
Salida de control = 30%
ALGORITMO DE VELOCIDAD:
En este algoritmo la salida de control es un offset que se le suma a la posición actual de la
válvula para lograr la salida deseada. Aquí si tiene importancia la posición actual de la válvula.
Ejemplo:
Salida deseada = 50%
Salida actual = 10%
Salida de control = 50% - 10% = 40%
OBSERVACIONES:
a.) Para usar el algoritmo de velocidad debemos tener un buen conocimiento del problema
de control digital en cuestión.
b.) Este algoritmo debe ser usado con actuadores que se muevan por porcentaje, es decir,
aquellos actuadores en los cuales una salida de control de cero por ciento (0%) significa
que se mantiene la posición actual.
PID DISCRETO A PARTIR DE LOS MÉTODOS:
INTEGRACIÓN TRAPEZOIDAL + DERIVADA POSTERIOR
( Z + 1) + K Z − 1
GC ( z ) = K PD + K ID ( ) (1.42)
( Z − 1) DD
Las constantes tienen el mismo significado que ya conocemos.
16. PID DISCRETO A PARTIR DE LOS MÉTODOS:
INTEGRACIÓN RECTANGULAR POSTERIOR + DERIVADA
POSTERIOR
Z
GC ( z ) = K PD + K ID + K DD ( Z − 1) (1.43)
Z −1
Las constantes tienen el mismo significado que ya conocemos.
PID DISCRETO A PARTIR DE LOS MÉTODOS:
INTEGRACIÓN RECTANGULAR ANTERIOR + DERIVADA
ANTERIOR
GC ( z ) = K PD + K ID
1
+ K DD
( Z − 1) (1.44)
Z −1 Z
Las constantes tienen el mismo significado que ya conocemos.
PID DISCRETO A PARTIR DE LOS MÉTODOS:
INTEGRACIÓN RECTANGULAR POSTERIOR + DERIVADA
ANTERIOR
GC ( z ) = K PD + K ID
Z
+ K DD
( Z − 1) (1.45)
Z −1 Z
Las constantes tienen el mismo significado que ya conocemos.
PID DISCRETO A PARTIR DE LOS MÉTODOS:
INTEGRACIÓN RECTANGULAR ANTERIOR + DERIVADA
POSTERIOR
1
GC ( z ) = K PD + K ID + K DD ( Z − 1) (1.46)
Z −1
Las constantes tienen el mismo significado que ya conocemos.