
Recommandé
Recommandé
Contenu connexe
Similaire à Detector visual Arduino
Similaire à Detector visual Arduino (20)
Plus de esaac2016
Plus de esaac2016 (20)
Dernier
Dernier (6)
Detector visual Arduino
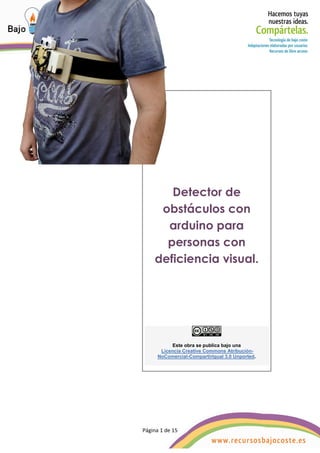
- 1. Página 1 de 15 Página 1 de 15 Detector de obstáculos con arduino para personas con deficiencia visual. Este obra se publica bajo una Licencia Creative Commons Atribución- NoComercial-CompartirIgual 3.0 Unported.
- 2. Página 2 de 15 Página 2 de 15 Detector de obstáculos con arduino para personas con deficiencia visual. Breve descripción Su objetivo principal es ayudar a las personas con deficiencia visual a moverse, evitando accidentes con objetos suspendidos y / o en una altura elevada. El dispositivo detectará obstáculos a una altura aproximada de los hombros del usuario, con una distancia máxima de aproximadamente 3 metros y una distancia mínima de aproximadamente 20 centímetros. Al percibir un obstáculo, él emitirá avisos tanto sonoros como táctiles, por medio de una pulsera / cinta vibratoria. El proyecto fue desarrollado junto al Grupo de Investigación LEI - Laboratorio de Estudios de Inclusión en asociación con el LA - Laboratorio de Accesibilidad de la Ulbra - Universidad Luterana de Brasil, campus Guaíba y es parte integrante del Trabajo de Conclusión de Curso en Sistemas de Información. Para quién se hizo y con qué objeto Uniendo la facilidad y disponibilidad del Arduino y sus sensores para auxiliar en la locomoción de las personas con deficiencia visual, fue utilizando un Arduino UNO, un sensor ultrasónico con un alcance medio y más algunos componentes, para crear un sensor de obstáculos que auxiliar en la locomoción
- 3. Página 3 de 15 Página 3 de 15 emitiendo señales de alerta sonidos y por medio de vibración al usuario con deficiencia visual cuando hay algún obstáculo en su trayecto. Materiales y modo de funcionamiento El proyecto fue dividido en etapas para una mejor estructuración y desarrollo, con lo que las etapas fueron denominadas: Bosque, Adquisición, Pruebas Individuales, Desarrollo, Prototipo, Montaje, Pruebas Finales. Durante el proceso de elaboración del proyecto, siguiendo las etapas descritas, se identificaron posibles mejoras que facilitarían el uso del dispositivo. En el caso de que se produzca un cambio en la calidad del producto, se debe tener en cuenta que el uso de este dispositivo durante mucho tiempo. Se utilizó en el proyecto tanto tecnologías de fácil acceso y utilización, como el Arduino, así como componentes que se destinan a otros fines, pero que serán fundamentales en el proyecto, como los mini motores vibracall. Por último, también se utilizó una estructura creada a través de una impresora 3D, lo que dio cierta libertad en la creación de la estructura. Proceso de elaboración El dispositivo detectará obstáculos a una altura aproximada de los hombros del usuario, con una distancia máxima de aproximadamente 3 metros y una distancia mínima de aproximadamente 20 centímetros. Al percibir un obstáculo, él emitirá avisos tanto sonoros como táctiles, por medio de
- 4. Página 4 de 15 Página 4 de 15 una pulsera / cinta vibratoria. Se utiliza una batería de 9V para proporcionar la energía necesaria para el dispositivo. Para satisfacer mejor las necesidades, todo el conjunto de procesamiento, sensores, batería y señalización sonora y de vibración se sitúa en el pecho del usuario, atrapados por un elástico con velcro, de fácil utilización, evitando así cables excesivos que podrían acarrear dificultades y limitaciones en la utilización del dispositivo. Precauciones Si la batería está sin carga no dispara los sensores. Autores y datos de contacto Nombre: João Manoel Pereira Centeno Ciudad: Tapes País: Brasil Teléfono: +55 51 9726-**** Correo electrónico: joaomanoel333@gmail.com Nombre: Maria Adelina Raupp Sganzerla Ciudad: Porto Alegre/RS País: Brasil Teléfono: +55(51) 30264*** Correo electrónico: masganzerla@gmail.com Nombre: Marlise Geller Ciudad: Canoas País: Brasil
- 5. Página 5 de 15 Página 5 de 15 Teléfono: +55(51) 3477.4*** Correo electrónico: marlise.geller@gmail.com
- 6. Página 6 de 15 Página 6 de 15 Galería de imágenes. Materiales utilizados, componentes. En cuanto a la fuente, se utiliza una batería de 9V para proporcionar la energía necesaria para el dispositivo. La elección se dio por la mayor duración de la carga, lo que permitirá al usuario una mayor durabilidad del dispositivo sin la necesidad de preocuparse por la batería y / o la carga. Teniendo esto en mente, se creó el bosquejo del proyecto, que se puede observar en la Figura.
- 7. Página 7 de 15 Página 7 de 15 Los valores presentados en la Figura se refieren a la compra realizada en julio de 2018, valones en la moneda brasileña, el Real. Para el desarrollo se utilizó la propia IDE del propio Arduino, siendo posible programar el sensor ultrasónico HC-SR04. La IDE todavía nos ofrece una gama de características, como un visor serial que permite observar en tiempo real la distancia que el sensor está captando, como podemos ver en la Figura.
- 8. Página 8 de 15 Página 8 de 15 Para satisfacer mejor las necesidades, todo el conjunto de procesamiento, sensores, batería y señalización sonora y de vibración se encuentra en el pecho o cintura del usuario, atrapados por un elástico con velcro, de fácil utilización, como se muestra en la Figura, evitando de esa forma cables excesivos que podrían acarrear en dificultad y constreñimiento en la utilización del dispositivo. Después de la definición del nuevo modelo de dispositivos, se realizaron las pruebas necesarias y la creación del prototipo. Las estructuras usadas, que se pueden observar en la Figura, fueron creadas a través de una Impresora 3D, siendo hechas de filamento ABS. Como las impresiones fueron realizadas con el equipo del LA - Laboratorio de Accesibilidad, en el cual el autor participa en el proyecto de investigación y desarrollo de Tecnologías Asistivas de la institución de enseñanza superior ULBRA, no hubo costo.
- 9. Página 9 de 15 Página 9 de 15 Como la idea es crear un único núcleo de procesamiento donde quede el sensor, Arduino, batería y salida para el auricular, y también la vibración, todo fue unido, creando así la mejor distribución de las piezas posibles para acomodar en el pecho o cintura del usuario, sin causar molestias. Los mini motores vibracall fueron acoplados en la estructura, a fin de que la vibración sea emitida del núcleo y que el usuario pueda percibir las señales incluso sin utilizar el auricular, que se trata de un ítem opcional.
- 10. Página 10 de 15 Página 10 de 15 Las piezas plásticas fueron insertadas en conjunto buscando la mejor arquitectura para acomodar todos los componentes. El sensor siempre debe colocarse hacia delante para detectar los obstáculos a la altura del pecho / cintura del usuario. El proyecto aún tiene la intención de crear una nueva estructura mayor que recubra todos los componentes utilizados, dando así un mejor diseño y protección de posibles daños a los componentes. Sin esta estructura, los componentes organizados y acoplados quedaron de acuerdo con la Figura.
- 11. Página 11 de 15 Página 11 de 15 Como se puede observar en la Figura, existen las fases de un ciclo de detección, lo que ocurrirá en segundos, incluyendo y la velocidad de la señal ultrasónica, que se trata de la velocidad del sonido. El Arduino emitirá una señal para que el sensor emita su señal, si no detecta nada, en algunos segundos esa señal será emitida nuevamente. Si la señal encuentra algún obstáculo en hasta 3 metros de distancia, se reflejará y el propio sensor lo captar, el Arduino entonces hará el cálculo de la distancia basado en el tiempo de viaje de la señal ultrasónica. Basado en la proximidad, el Arduino emitirá las señales de alerta al usuario por medio del auricular o pulsera vibratoria.
- 12. Página 12 de 15 Página 12 de 15 El flujo de actividad, siendo muy similar al diagrama de actividad, sin embargo, utilizando imágenes reales para un mejor entendimiento e ilustración del proceso.
- 13. Página 13 de 15 Página 13 de 15 En la primera prueba con distancias entre 3m y 2m el sensor presentó un poco de inestabilidad, no detectando con exactitud a distancia, teniendo un margen de error entre 15 a 25 centímetros, pudiendo variar dependiendo de la superficie reflejada, como por ejemplo vidrio. En la segunda prueba entre 2m y 1m, el dispositivo detectó las distancias correctamente, teniendo un margen de error menor, alrededor de 10 centímetros también variando de acuerdo a la superficie. Por último, las pruebas con distancias menores, entre 1m y 20 cm fueron las más precisas, casi no variando a distancia, pudiendo tener un margen de error de 2 a 5 centímetros, lo que rodea el equipo con potencial para uso. Un punto detectado durante las pruebas fue una variación que ocurre aleatoriamente después de más o menos 50 lecturas, donde el sensor realiza una lectura muy por encima de lo esperado, como por ejemplo 3000 metros. Esto fue tratado en el código, donde él desconsideró distancias por encima de 3 metros.
- 14. Página 14 de 15 Página 14 de 15 Prototipo finalizado.
- 15. Página 15 de 15 Página 15 de 15 Usuario probando.