This document discusses calculating moments of inertia for an area about inclined axes. It provides transformation equations to relate moments of inertia with respect to x-y axes to moments with respect to inclined u-v axes. It also describes how to determine the principal axes, which are the orientations that produce the maximum and minimum moments of inertia. An example is provided to illustrate finding the principal moments of inertia for a beam cross-section.
Driving Behavioral Change for Information Management through Data-Driven Gree...
6161103 10.7 moments of inertia for an area about inclined axes
1. 10.7 Moments of Inertia for an
Area about Inclined Axes
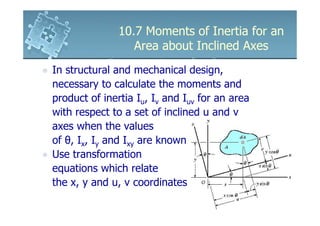
In structural and mechanical design,
necessary to calculate the moments and
product of inertia Iu, Iv and Iuv for an area
with respect to a set of inclined u and v
axes when the values
of θ, Ix, Iy and Ixy are known
Use transformation
equations which relate
the x, y and u, v coordinates
2. 10.7 Moments of Inertia for an
Area about Inclined Axes
u = x cos θ + y sin θ
v = y cos θ − x sin θ
For moments and product of inertia of
dA about the u and v axes,
dI u = v 2 dA = ( y cos θ − x sin θ ) 2 dA
dI v = u 2 dA = ( x cos θ + y sin θ ) 2 dA
dI uv = uvdA = ( x cos θ + y sin θ )( y cos θ − x sin θ )dA
3. 10.7 Moments of Inertia for an
Area about Inclined Axes
Integrating,
I u = I x cos 2 θ + I y sin 2 θ − 2 I xy sin θ cos θ
I v = I x sin 2 θ + I y cos 2 θ + 2 I xy sin θ cos θ
I uv = I x sin θ cos θ − I y sin θ cos θ + 2 I xy (cos 2 θ − sin 2 θ )
Simplifying using trigonometric identities,
sin 2θ = 2 sin θ cos θ
cos 2θ = cos 2 θ − sin 2 θ
4. 10.7 Moments of Inertia for an
Area about Inclined Axes
Ix + I y Ix − I y
Iu = + cos 2θ − I xy sin 2θ
2 2
Ix + I y Ix − Iy
Iv = − cos 2θ + I xy sin 2θ
2 2
Ix − I y
I uv = sin 2θ + 2 I xy cos 2θ
2
Polar moment of inertia about the z axis
passing through point O is independent of
the u and v axes
J O = Iu + Iv = I x + I y
5. 10.7 Moments of Inertia for an
Area about Inclined Axes
Principal Moments of Inertia
Iu, Iv and Iuv depend on the angle of
inclination θ of the u, v axes
To determine the orientation of these axes
about which the moments of inertia for the
area Iu and Iv are maximum and minimum
This particular set of axes is called the
principal axes of the area and the
corresponding moments of inertia with
respect to these axes are called the principal
moments of inertia
6. 10.7 Moments of Inertia for an
Area about Inclined Axes
Principal Moments of Inertia
There is a set of principle axes for every
chosen origin O
For the structural and mechanical design of a
member, the origin O is generally located at
the cross-sectional area’s centroid
The angle θ = θp defines the orientation of
the principal axes for the area. Found by
differentiating with respect to θ and setting
the result to zero
7. 10.7 Moments of Inertia for an
Area about Inclined Axes
Principal Moments of Inertia
dI u Ix − Iy
dθ 2 sin 2θ − 2 I xy cos 2θ = 0
= −2
Therefore
θ =θp
− I xy
tan 2θ p =
(I − I )/ 2
x y
Equation has 2 roots, θp1 and
θp2 which are 90° apart and
so specify the inclination of
the principal axes
8. 10.7 Moments of Inertia for an
Area about Inclined Axes
Principal Moments of Inertia
2
Ix − I y 2
Forθp1,sin2θp1 = −Ixy /
2 + Ixy
2
Ix − I y Ix − I y 2
cos2θp1 =
2 /
2 + Ixy
2
Ix − I y 2
Forθp2,sin2θ p2 = Ixy /
2 + Ixy
2
Ix − I y Ix − I y 2
cos2θp2 = −
2 /
2 + Ixy
9. 10.7 Moments of Inertia for an
Area about Inclined Axes
Principal Moments of Inertia
2
Ix + Iy Ix − Iy
I max
min = ±
2 + I xy
2
2
Depending on the sign chosen, this result gives
the maximum or minimum moment of inertia for
the area
It can be shown that Iuv = 0, that is, the product
of inertia with respect to the principal axes is
zero
Any symmetric axis represent a principal axis of
inertia for the area
10. 10.7 Moments of Inertia for an
Area about Inclined Axes
Example 10.9
Determine the principal moments of inertia
for the beam’s
cross-sectional area with
respect to an axis passing
through the centroid.
11. 10.7 Moments of Inertia for an
Area about Inclined Axes
Solution
Moment and product of inertia of the cross-sectional
area with respect to the x, y axes have been
computed in the previous examples
( )
I x = 2.90 109 mm 4 ( )
I y = 5.60 109 mm 4 ( )
I z = −3.00 109 mm 4
Using the angles of inclination of principal axes u
and v − I xy 3.00(109 )
tan 2θ p = = = −2.22
(I x − I y )/ 2 [2.90(10 )− 5.60(10 )]/ 2
9 9
2θ p1 = −65.8o ,2θ p 2 = 114.2o
Thus, θ p1 = −32.9o , θ p 2 = 57.1o
12. 10.7 Moments of Inertia for an
Area about Inclined Axes
Solution
For principal of inertia with respect to the u
and v axes 2
Ix + Iy Ix − Iy
I min =
max
±
2 + I xy
2
2
=
( )
2.90 109 + 5.60 109 ( )
2
±
( )
2.90 109 − 5.60 109 ( ) 2
[ ( )]
2
+ − 3.00 10
9
2
( ) ( )
I min = 4.25 109 ± 3.29 109
max
or
( ) ( )
I max = 7.54 109 mm 4 , I min = 0.960 109 mm 4
13. 10.7 Moments of Inertia for an
Area about Inclined Axes
Solution
Maximum moment of inertia occurs with
respect to the selected u axis since by
inspection, most of the cross-sectional area is
farthest away from this axis
Maximum moment of inertia occurs at the u
axis since it is located within ±45° of the y
axis, which has the largest value of I