Robo arm final 2 (2)
•Télécharger en tant que PPTX, PDF•
18 j'aime•11,444 vues

Robotic arm using microcontroller Electronics project

Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
En vedette (20)
Similaire à Robo arm final 2 (2)
Similaire à Robo arm final 2 (2) (20)
Dernier
Dernier (20)
Robo arm final 2 (2)
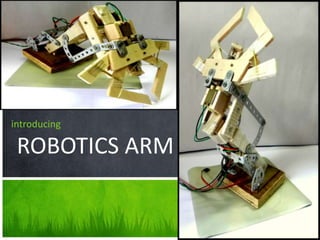
- 1. introducing ROBOTICS ARM a tour of new features
- 2. Presentedby AGNIBHA MUKHOPADHYAY DEBOLEENA MONDAL GODHULI BISWAS PRITAM BANERJEE SUBHANKAR JANA
- 3. AIM OF THE PROJECT • The main aim of our project is to build a robotic arm that can grip or pick things • We have implemented the robotic arm that can be controlled by gesture commands. We have proposed a simple algorithm for hand gesture recognition.
- 4. What is a ROBOTICS ARM???
- 5. ROBO ARM & DEGREE OF FREEDOM • A robotic arm is a robotic manipulator, usually programmable, with similar functions to a human arm. • It has about the same number of degree of freedom as in human arm.
- 6. MAKING OF ROBOTICS ARM AT A GLANCE The movement of the human arm is sensed by accelerometer The accelerometer generates an analog voltage accordingly. The movement of fingers is sensed by flex sensors which causes a change in the resistance An impedance follower is used to convert the resistance to voltage. The analog voltages are then digitized using an A/D converter . It is then sent to the microcontroller. Microcontroller differentiates all data of X-axis, Y-axis & Z-axis. These data are used to generate PWM signal for corresponding servo motors. The data from flex sensor are used to drive a motor driver This motor driver drives the DC motor of the gripper part
- 7. To build a gestures control robotics arm We have technical details for every step of the way Sensors Module Logical Module Execution Module
- 8. SENSORS Module Capture and Organize
- 9. HOW THE GESTURES CAN BE CAPTURED? Analog output voltage Accelerometer & Flex Sensors Movement of human arm
- 10. ACCELEROMETER • The movement of the human arm is sensed by accelerometer. • The accelerometer generates an analog voltage accordingly. • Analog voltage passes through a lowpass filter
- 11. Mode of operation The 3-axis accelerometer attached to the right arm is used to recognize gestures and postures. The robot moves along the X, Y and Z axes separately. To move the robot in the X direction, the user should move the accelerometer along the X axis, keeping it in the horizontal.
- 12. Recognition of gestures and postures When the arm is moved in the positive X direction (X+) initially the value of acceleration x a increases because the arm begins to move and then, when the arm begins to slow the positive value of x a is converted to a negative value. This point ( a 0 x = ) marks the point of maximum speed. The acceleration a y remains near to zero and z a remains near to one because the accelerometer is held horizontally (acceleration due to gravity).
- 13. For our project a ±1.5g, ±6g three-axis low g micro machined accelerometer (MMA7361L) has been used The MMA7361L is a low power, low profile capacitive micro machined accelerometer featuring signal conditioning , a 1-pole low pass filter, temperature compensation, self-test, 0g-Detect which detects linear free fall, and g-Select which allows for the selection between 2 sensitivities. Zero-g offset and sensitivity are factory set and require no external devices. •The MMA7361L includes a Sleep Mode that makes it ideal for handheld battery powered electronics.
- 14. GRIPPING MECHANISM For gripping mechanism, flex sensors are used on two fingers i.e forefinger and thumb. Flex sensors are sensors that change in resistance depending on the amount of bend on the sensors. They convert the change in bend to electrical resistance-the more the bend, the more the resistance value
- 15. Inside the flex sensor are carbon resistive elements within a thin flexible substrate. More carbon means less resistance. When the substrate is bent the sensor produces a resistance output relative to the bend radius-the smaller the radius, the higher the resistance value
- 16. LOGICAL Module Analysis, Calculate and Making decision
- 17. HUMAN TO MCU INTERFACE • The analog voltage is then digitized using an A/D converter . • It is then sent to the microcontroller where it generates a unique 8 bit digit code for different axis and different voltages. Analog data enter to ADC MCU 8 bit binary data
- 18. Atmega8(L)-FEW FEATURES The microcontroller used for the project is Atmega8(L). ADC7..6 (TQFP andQFN/MLF Package Only)-In the TQFP and QFN/MLF package, ADC7..6 serve as analog inputs to the A/D converter.These pins are powered from the analog supply and serve as 10-bit ADC channels. The ATmega8 on the board comes pre-loaded with a bootloader program, which can be used to burn your project’s HEX files on the microcontroller directly via the USB connector without any separate programmer.
- 19. HOW DOES THE CIRCUIT WORK ? •The Port B of the microcontroller is set for the output. Reference voltage is at AVcc. •The ADC converts an analog input voltage to a 8-bit digital value through successive approximation.. •The ADC is enabled by setting the ADC Enable bit, ADEN in ADCSRA. •The ADC generates a 10-bit result which is presented in the ADC Data Registers, ADCH and ADCL. •A single conversion is started by writing a logical one to the ADC Start Conversion bit, ADSC. This bit stays high as long as the conversion is in progress and will be cleared by hardware when the conversion is completed.
- 20. Activating the accelerometer: •Accelerometer first remains at sleep mode. •A positive high signal sent to SL pin of accelerometer through PB4 pin of MCU to activate the accelerometer.
- 21. Initializing PWM for driving motors: •The Timer/Counter (TCNT1), Output Compare Registers (OCR1A/B), and Input Capture Register(ICR1) are all 16-bit registers. •The double buffered Output Compare Registers (OCR1A/B) are compared with the Timer/Counter value at all time. The result of the compare can be used by the waveform generator to generate a PWM or variable frequency output on the Output Compare Pin (OC1A/B). •The 16bit timer/counter1 (TCNT1) is set for fast PWM mode. The time period is set at 20ms. The Timer/Counter can be clocked internally, via the prescalar. Prescalar value is set at 64 division factor •For output PB1 and PB2 are selected
- 22. MCU TO MECHANICAL PART INTERFACE • The 8 bit data is then sent to be compared with registers of Timer1. • Content of OCR1A & OCR1B are compared with ICR1 and PWM signals are generated.
- 23. EXECUTION Module Collect data and Follow instructions
- 24. WORKING OF MECHANICAL PART Movement of ROBOTICS ARM Motors Motor driver
- 25. MOTORS • Motors are used for joint rotation. • The base consists of a servo motor allowing forward/backward movement. • The elbow consists of a servo motor allowing up/down movement of the arm. • The grip consists of a d.c. motor allowing to grip a object.
- 26. What makes a Servo Servo motors are constructed out of basic DC motors, by adding: • some gear reduction • a position sensor for the motor shaft • an electronic circuit that controls the motor's operation
- 27. Feed-back loop It is a closed servomechanism that uses position feedback to control its motion and final position. The input to its control is some signal, either analogue or digital, representing the position commanded for the output shaft. The motor is paired with some type of encoder to provide position and speed feedback.
- 28. How do servo motors work ? Servos are controlled by sending an electrical pulse of variable width, or pulse width modulation (PWM), through the control wire. There is a minimum pulse, a maximum pulse, and a repetition rate. Servo motors can usually only turn 90 degrees in either direction for a total of 180 degree movement. The PWM sent to the motor determines position of the shaft, and based on the duration of the pulse sent via the control wire; the rotor will turn to the desired position. The servo motor expects to see a pulse every 20 milliseconds (ms) and the length of the pulse will determine how far the motor turns. For example, a 1.5ms pulse will make the motor turn to the 90-degree position. Shorter than 1.5ms moves it to 0 degrees, and any longer than 1.5ms will turn the servo to 180 degrees,
- 29. GRIP Dc motor which is driven by a motor driver (L293D) is used for the gripper part. The L293D is designed to provide bidirectional drive currents of up to 600-mA at voltages from 4.5 V to 36 V.
- 30. gg The bent in fingers is indicated by the change in resistance which in turn drives the dc motor attached to the gripper. As the motor rotates the gripper closes in thus grabbing the object in between.
- 31. D.C.MOTOR SERVO MOTOR SERVO MOTOR BASE The arm is made with balsa wood. The wood pieces are carefully cut according to the measurements and then they are put together to form the structure of the arm.
- 32. ?But wait… There’s More! Why we need ROBOTICS ARM???
- 33. . The robotic arm can be designed to perform any desired task such as welding, gripping, spinning etc. . The space shuttle Remote Manipulator System have multi degree of freedom robotic arms . In various industrial or home applications . In medical science: soft tissue manipulation, needle insertion, suturing, and cauterization. SOME APPLICATIONS
- 34. FUTURE SCOPE MECHANICAL DESIGN-more efficient,reliable,improved power UNIVERSAL GRIPPER-capable of doing multiple tasks MOBILITY & NAVIGATION- mobile,able to move under their own power & navigation systems SENSOR CAPABILITIES-3 accelerometers used for shoulder,elbow & wrist movement allowing circular & angular movements TELE PRESENCE-communicate information about its environment back to a remote “safe” location INTELLIGENCE-Capable of making decisions about the task it performs.
- 35. CONCLUSION Robots help people with tasks that would be difficult, unsafe, or boring for a real person to do alone. To conclude, robotic arm, is probably the most mathematically complex robotic part one could ever build.
- 36. ACKNOWLEDGEMENT Our deepest thanks to our mentor, Mrs Antara Mukherjee, for helping us out and guiding us with her valuable suggestions and support.
Notes de l'éditeur
- This presentation demonstrates the new capabilities of PowerPoint and it is best viewed in Slide Show. These slides are designed to give you great ideas for the presentations you’ll create in PowerPoint 2010!For more sample templates, click the File tab, and then on the New tab, click Sample Templates.