Rangkaian-Elektronika-Pewaktu-Turun-7-Segmen-LED
•Télécharger en tant que DOC, PDF•
0 j'aime•442 vues


Recommandé
Contenu connexe
Similaire à Rangkaian-Elektronika-Pewaktu-Turun-7-Segmen-LED
Similaire à Rangkaian-Elektronika-Pewaktu-Turun-7-Segmen-LED (20)
Rangkaian-Elektronika-Pewaktu-Turun-7-Segmen-LED
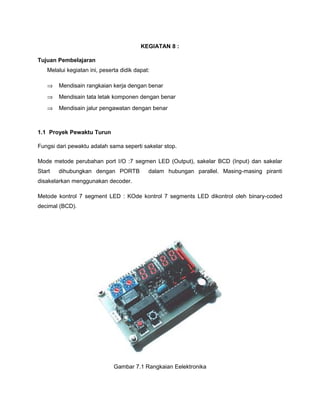
- 1. KEGIATAN 8 : Tujuan Pembelajaran Melalui kegiatan ini, peserta didik dapat: ⇒ Mendisain rangkaian kerja dengan benar ⇒ Mendisain tata letak komponen dengan benar ⇒ Mendisain jalur pengawatan dengan benar 1.1 Proyek Pewaktu Turun Fungsi dari pewaktu adalah sama seperti sakelar stop. Mode metode perubahan port I/O :7 segmen LED (Output), sakelar BCD (Input) dan sakelar Start dihubungkan dengan PORTB dalam hubungan parallel. Masing-masing piranti disakelarkan menggunakan decoder. Metode kontrol 7 segment LED : KOde kontrol 7 segments LED dikontrol oleh binary-coded decimal (BCD). Gambar 7.1 Rangkaian Eelektronika
- 2. 1.1.1 Rangkaian Elektronika Gambar 9.1 Rangkaian Eelektronika 1.1.2 Tata Letak Komponen
- 3. Gambar 8.2Tata Letak Komponen
- 4. 1.1.3 Jalur Pengawatan Gambar 8.2Tata Letak Kompo Tugas Disainlah tata letak dan jalur pengawatan rangkaian kerja diatas Test Formatif Lapor hasil kerja proyek
- 5. Lembar Kerja Peserta Didik Jawab :