Robotic cable inspection system
•Télécharger en tant que PPTX, PDF•
11 j'aime•5,087 vues

this is about robotic cable inspection to detect the exact location of the fault. In this we are using ATmega 1280 micro controller for operating the robot. There is a GPS module to find exact location of the robot to detect the fault. We are using different sensors for detection of faults in the under ground cables.

Recommandé
Recommandé
Contenu connexe
Tendances
Tendances (20)
En vedette
En vedette (20)
Similaire à Robotic cable inspection system
Similaire à Robotic cable inspection system (20)
Dernier
Dernier (20)
Robotic cable inspection system
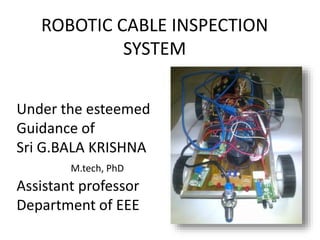
- 1. ROBOTIC CABLE INSPECTION SYSTEM Under the esteemed Guidance of Sri G.BALA KRISHNA M.tech, PhD Assistant professor Department of EEE
- 2. DHANA LAKSHMI ……. 11741A0215 GURU SEKHAR ……. 11741A0220 INDIRAVATHI ……. 11741A0226 KALYANI ……. 11741A0230 KEERTHI ……. 11741A0231 MAHESH KUMAR ……. 11741A0240 MEETYA NAIK ……. 11741A0242 Presented by:
- 3. ABSTRACT ROBOTIC CABLE INSPECTION SYSTEM An Innovative and low-cost robotic mobile system to be employed in inspection of underground cable to know Accurate, real-time information about the Underground cable status. And also this power distribution cable network can save the power industry millions of rupees lost due to line failures or cables. Hence the semi – autonomous robot for the inspection of electric power cables is designed. The design of platform consists of a multi-processor control board, a 2 GHz wireless communication module, and infrared, e-field sensor, metal sensor, fire sensor, temperature sensor, acoustic sensors, AV cameras and GPS module also to locate the geographical location of fault. The application indicates that such low-cost robot systems can improve the efficiency of the cable inspection system.
- 4. Types of Transmission Lines Over head lines ADVANTAGES Cheaper Easily replace reliability DISADVANTAGE Not applicable for all locations Under ground cable ADVANTAGES It can be applicable any where Ex in cities and in under water DISADVANTAGE Costlier High maintenance Less reliable
- 5. Types of Faults • open circuit fault • short circuit faults • Line to ground faults
- 6. Existing method Contemporary methods for fault location on overhead lines and underground cables can be classified into two fundamental types: • 1) EARTH FAULT LOCALISATION BY BRIDGE MEAGER measurement of post-fault line impedance n = 100m • 2)PULSE ECHO TESTER OR ECHO METER the measurement of the fault generated travelling wave component. n = 10 m
- 7. Arc Reflection Method The arc reflection method of fault pre- locating combines the use of a TDR (cable radar) and a surge generator (thumper). By using an arc reflection filter, a low voltage TDR and a high voltage surge generator can both be connected to the faulted cable and the TDR can be looking down the cable while thumping. The filter protects the TDR from the surge generator high voltage pulses and routes the low voltage pulses down the cable. This method utilizes the fact that when an arc is created at the fault, its resistance is reduced to a very low value, less than 200 ohms, which will reflect radar pulses. The arc location will appear as a downward going reflection on the TDR cable trace. • TDR– Time Domain Reflectometer
- 8. Robotic Platform • Few successful robot applications have been reported for underground distribution cables. • Numerous problems have to be solved for this type of robot, such as space confinement, size and weight restrictions, wireless design requirements, and adverse environmental conditions.
- 11. Mechanical design: • The robotic platform consists of two modular segments coupled by a freely rotating joint. The platform is height constrained by the tunnel environment. The front and rear modules contain hourglass shaped wheels with 12V DC motors to propel the platform along the cable
- 12. Casing for UC
- 13. Sensor Technology • Infrared thermal analysis: To accurately measure the surface temperature of an object, the most important thing is to identify emissivity of the object • Acoustic partial discharge analysis: The amplitude and frequency components of acoustic waves generated from partial discharges are both factors in detection. • Fringing electric field sensing: Fringing electric field sensing is a tentative way to measure the dielectrometry properties of cables.
- 14. SENSOR POSITION Thermal Analysis Discharge Analysis Electric Field Sensing
- 15. Single IR Sensor Module • Used for line following or object detection. Range is around 3cm to 15cm depending on ambient light
- 16. Fire Detector Sensor Module • The Fire sensor, is used for the detection of fire with in the range of 1 to 2 meters. • It can easily mount on the robot platform due to less weight of about 5 gms.
- 17. Temperature sensor • LM35 is used as temperature sensor with an output voltage linearly proportional to centigrade temperature with centigrade scaling
- 18. Metal sensor •Metal sensors are of inductive type. •It transmits an electromagnetic field into ground. •If any metal object within the electromagnetic field will become energized and retransmit an electromagnetic field of their own. • The detector coil receives that signal and alerts the user.
- 19. Basic E-Field Sensor Board • E-field sensor adds sense of “pretouch” to a robot hand and arm, allowing it to detect that it is close to objects without touching them.
- 20. • We are using a wireless AV camera in this project for security purpose in mines, Wars, Shopping malls etc,. • The output is observed in the portable TV.
- 21. Power supply unit • Power supply unit consists of step down transformer, bridge rectifier, filter, regulator and rechargeable battery Step down transformer Bridge rectifier Filter regulator Rechargeable battery
- 22. Distributed control: • The control board consists of three Atmel micro- controllers. Each has specific functions related to the robot's operation, which greatly increases the performance of the robot. The control system coordinates the collection of data, communications, movements and autonomous functionality.
- 23. Microcontroller
- 24. GPS Tracking Module GT-320RW. Model: GT-320RW GPS Tracking Module
- 25. Micro controller Power Supply IR Sensor Fire Sensor Discharge Sensor Metal Sensor Temperature sensor GPS Tracking Module E-Field Sensor DC motor Speed CC2500 Based Wireless module H-bridge
- 26. Computer control PC Remote monitoring system Speed CC2500 Based Wireless module
- 27. Control system We can control and monitor the system from a remote computer by wireless communication
- 28. INJECTION We can inject the robot from any where of the system
- 29. Advantages • Reliability of under ground cables increases • Lower maintenance cost • Takes less time to clear the fault • Less weather effect when compared to overhead lines • Continuous power supply can be done • Exact location of fault can be detected
- 30. THANK YOU