Soumettre la recherche
Mettre en ligne
Rtミドルウェアサマーキャンプ資料2021_坂本武志_2
•
Télécharger en tant que PPTX, PDF
•
0 j'aime
•
64 vues
O
openrtm
Suivre
RTMSummerCamp2021 1日目 SysMLモデル例
Lire moins
Lire la suite
Formation
Signaler
Partager
Signaler
Partager
1 sur 6
Télécharger maintenant
Recommandé
200k/sec
200k/sec
Sugawara Genki
NCstudy 2.5
NCstudy 2.5
Yuichi Saotome
Web勉強会 20120927
Web勉強会 20120927
Yoshihiro Furukawa
ROBOMECH2023 RTミドルウェア講習会 第1部
ROBOMECH2023 RTミドルウェア講習会 第1部
openrtm
ピッキングシステム
ピッキングシステム
openrtm
GNGを使った未知環境における経路計画
GNGを使った未知環境における経路計画
openrtm
まねっこロボット
まねっこロボット
openrtm
商品自動補充ロボットシステム
商品自動補充ロボットシステム
openrtm
Recommandé
200k/sec
200k/sec
Sugawara Genki
NCstudy 2.5
NCstudy 2.5
Yuichi Saotome
Web勉強会 20120927
Web勉強会 20120927
Yoshihiro Furukawa
ROBOMECH2023 RTミドルウェア講習会 第1部
ROBOMECH2023 RTミドルウェア講習会 第1部
openrtm
ピッキングシステム
ピッキングシステム
openrtm
GNGを使った未知環境における経路計画
GNGを使った未知環境における経路計画
openrtm
まねっこロボット
まねっこロボット
openrtm
商品自動補充ロボットシステム
商品自動補充ロボットシステム
openrtm
RTサマーキャンプ2022最終発表_都立大.pptx
RTサマーキャンプ2022最終発表_都立大.pptx
openrtm
SysML実習20220822SC_GA.pdf
SysML実習20220822SC_GA.pdf
openrtm
RTミドルウェアサマーキャンプ資料2022.pdf
RTミドルウェアサマーキャンプ資料2022.pdf
openrtm
NEDO講座 MoveIt! チュートリアル 第1部
NEDO講座 MoveIt! チュートリアル 第1部
openrtm
5.総合演習(2)
5.総合演習(2)
openrtm
4.総合演習(1)
4.総合演習(1)
openrtm
3.RTCプログラミング演習
3.RTCプログラミング演習
openrtm
2.プログラミングの基礎
2.プログラミングの基礎
openrtm
1.コース概要
1.コース概要
openrtm
OpenRTM概要
OpenRTM概要
openrtm
Slam実習
Slam実習
openrtm
Rtshell入門
Rtshell入門
openrtm
Rtコンポーネント作成入門
Rtコンポーネント作成入門
openrtm
Rtミドルウェアサマーキャンプ2021_宮本信彦
Rtミドルウェアサマーキャンプ2021_宮本信彦
openrtm
RTミドルウェアサマーキャンプ2021_坂本武志_1
RTミドルウェアサマーキャンプ2021_坂本武志_1
openrtm
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
openrtm
ROBOMECH2021 RTMオンライン講習会 第1部
ROBOMECH2021 RTMオンライン講習会 第1部
openrtm
ROBOMECH2021 RTM講習会 第1部
ROBOMECH2021 RTM講習会 第1部
openrtm
201111 05
201111 05
openrtm
201111 04
201111 04
openrtm
TokyoTechGraduateExaminationPresentation
TokyoTechGraduateExaminationPresentation
YukiTerazawa
The_Five_Books_Overview_Presentation_2024
The_Five_Books_Overview_Presentation_2024
koheioishi1
Contenu connexe
Plus de openrtm
RTサマーキャンプ2022最終発表_都立大.pptx
RTサマーキャンプ2022最終発表_都立大.pptx
openrtm
SysML実習20220822SC_GA.pdf
SysML実習20220822SC_GA.pdf
openrtm
RTミドルウェアサマーキャンプ資料2022.pdf
RTミドルウェアサマーキャンプ資料2022.pdf
openrtm
NEDO講座 MoveIt! チュートリアル 第1部
NEDO講座 MoveIt! チュートリアル 第1部
openrtm
5.総合演習(2)
5.総合演習(2)
openrtm
4.総合演習(1)
4.総合演習(1)
openrtm
3.RTCプログラミング演習
3.RTCプログラミング演習
openrtm
2.プログラミングの基礎
2.プログラミングの基礎
openrtm
1.コース概要
1.コース概要
openrtm
OpenRTM概要
OpenRTM概要
openrtm
Slam実習
Slam実習
openrtm
Rtshell入門
Rtshell入門
openrtm
Rtコンポーネント作成入門
Rtコンポーネント作成入門
openrtm
Rtミドルウェアサマーキャンプ2021_宮本信彦
Rtミドルウェアサマーキャンプ2021_宮本信彦
openrtm
RTミドルウェアサマーキャンプ2021_坂本武志_1
RTミドルウェアサマーキャンプ2021_坂本武志_1
openrtm
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
openrtm
ROBOMECH2021 RTMオンライン講習会 第1部
ROBOMECH2021 RTMオンライン講習会 第1部
openrtm
ROBOMECH2021 RTM講習会 第1部
ROBOMECH2021 RTM講習会 第1部
openrtm
201111 05
201111 05
openrtm
201111 04
201111 04
openrtm
Plus de openrtm
(20)
RTサマーキャンプ2022最終発表_都立大.pptx
RTサマーキャンプ2022最終発表_都立大.pptx
SysML実習20220822SC_GA.pdf
SysML実習20220822SC_GA.pdf
RTミドルウェアサマーキャンプ資料2022.pdf
RTミドルウェアサマーキャンプ資料2022.pdf
NEDO講座 MoveIt! チュートリアル 第1部
NEDO講座 MoveIt! チュートリアル 第1部
5.総合演習(2)
5.総合演習(2)
4.総合演習(1)
4.総合演習(1)
3.RTCプログラミング演習
3.RTCプログラミング演習
2.プログラミングの基礎
2.プログラミングの基礎
1.コース概要
1.コース概要
OpenRTM概要
OpenRTM概要
Slam実習
Slam実習
Rtshell入門
Rtshell入門
Rtコンポーネント作成入門
Rtコンポーネント作成入門
Rtミドルウェアサマーキャンプ2021_宮本信彦
Rtミドルウェアサマーキャンプ2021_宮本信彦
RTミドルウェアサマーキャンプ2021_坂本武志_1
RTミドルウェアサマーキャンプ2021_坂本武志_1
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
Rtミドルウェアサマーキャンプ資料2021_菅佑樹
ROBOMECH2021 RTMオンライン講習会 第1部
ROBOMECH2021 RTMオンライン講習会 第1部
ROBOMECH2021 RTM講習会 第1部
ROBOMECH2021 RTM講習会 第1部
201111 05
201111 05
201111 04
201111 04
Dernier
TokyoTechGraduateExaminationPresentation
TokyoTechGraduateExaminationPresentation
YukiTerazawa
The_Five_Books_Overview_Presentation_2024
The_Five_Books_Overview_Presentation_2024
koheioishi1
UniProject Workshop Make a Discord Bot with JavaScript
UniProject Workshop Make a Discord Bot with JavaScript
yuitoakatsukijp
東京工業大学 環境・社会理工学院 建築学系 大学院入学入試・進学説明会2024_v2
東京工業大学 環境・社会理工学院 建築学系 大学院入学入試・進学説明会2024_v2
Tokyo Institute of Technology
生成AIの回答内容の修正を課題としたレポートについて:お茶の水女子大学「授業・研究における生成系AIの活用事例」での講演資料
生成AIの回答内容の修正を課題としたレポートについて:お茶の水女子大学「授業・研究における生成系AIの活用事例」での講演資料
Takayuki Itoh
ゲーム理論 BASIC 演習106 -価格の交渉ゲーム-#ゲーム理論 #gametheory #数学
ゲーム理論 BASIC 演習106 -価格の交渉ゲーム-#ゲーム理論 #gametheory #数学
ssusere0a682
ゲーム理論 BASIC 演習105 -n人囚人のジレンマモデル- #ゲーム理論 #gametheory #数学
ゲーム理論 BASIC 演習105 -n人囚人のジレンマモデル- #ゲーム理論 #gametheory #数学
ssusere0a682
Dernier
(7)
TokyoTechGraduateExaminationPresentation
TokyoTechGraduateExaminationPresentation
The_Five_Books_Overview_Presentation_2024
The_Five_Books_Overview_Presentation_2024
UniProject Workshop Make a Discord Bot with JavaScript
UniProject Workshop Make a Discord Bot with JavaScript
東京工業大学 環境・社会理工学院 建築学系 大学院入学入試・進学説明会2024_v2
東京工業大学 環境・社会理工学院 建築学系 大学院入学入試・進学説明会2024_v2
生成AIの回答内容の修正を課題としたレポートについて:お茶の水女子大学「授業・研究における生成系AIの活用事例」での講演資料
生成AIの回答内容の修正を課題としたレポートについて:お茶の水女子大学「授業・研究における生成系AIの活用事例」での講演資料
ゲーム理論 BASIC 演習106 -価格の交渉ゲーム-#ゲーム理論 #gametheory #数学
ゲーム理論 BASIC 演習106 -価格の交渉ゲーム-#ゲーム理論 #gametheory #数学
ゲーム理論 BASIC 演習105 -n人囚人のジレンマモデル- #ゲーム理論 #gametheory #数学
ゲーム理論 BASIC 演習105 -n人囚人のジレンマモデル- #ゲーム理論 #gametheory #数学
Rtミドルウェアサマーキャンプ資料2021_坂本武志_2
1.
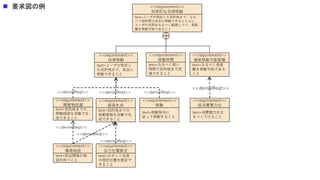
<<requirement>> 効率的な自律移動 text=ユーザが指定した目的地まで,なる べく短時間で安全に移動できるとともに, ユーザの手間をなるべく軽減しつつ,長距 離を移動可能であること <<deriveReqt>> 要求図の例 <<requirement>> 自律移動 text=ユーザが指定し た目的地まで,安全に 移動できること <<requirement>> 経路生成 text=目的地までの 移動経路を自動で生 成できること <<requirement>> 障害物回避 text=目的地までの 移動経路を自動で生 成できること <<requirement>> 自己位置推定 text=ロボット自身 の現在位置を推定で きること <<requirement>> 環境地図 text=周辺環境の地 図を持つこと <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<requirement>> 移動 text=移動指令に 従って移動すること <<deriveReqt>> <<requirement>> 移動時間 text=なるべく短い 時間で目的地まで到 達できること <<requirement>> 連続移動可能距離 text=なるべく長距 離を移動可能である こと <<requirement>> 低消費電力化 text=消費電力をな るべく下げること
2.
<<requirement>> 効率的な自律移動 <<deriveReqt>> 要求図の例(簡易版) <<requirement>> 自律移動 <<requirement>> 経路生成 <<requirement>> 障害物回避 <<requirement>> 自己位置推定 <<requirement>> 環境地図 <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<deriveReqt>> <<requirement>> 移動 <<deriveReqt>> <<requirement>> 移動時間 <<requirement>> 連続移動可能距離 <<requirement>> 低消費電力化 <<requirement>> 環境地図マッチング <<deriveReqt>> <<deriveReqt>> <<requirement>> デッドレコニング <<deriveReqt>> <<requirement>> ユーザビリティの向上 <<requirement>> 環境地図自動生成 <<deriveReqt>> <<requirement>> 地図精度の向上 <<deriveReqt>> <<deriveReqt>>
<<requirement>> パターン移動 <<deriveReqt>>
3.
:経路生成 内部ブロック図の例 :自己位置推定 現在位置:~位置 現在位置:位置 目的地を設定する :障害物回避 目標位置:~位置 目標位置:位置 :地図生成 現在位置:位置 :移動制御 移動指令:~速度 移動指令:速度 :~移動量 :移動量 移動指令:~速度 :周辺環境計測 :測域センサ制御[0..1] :距離画像センサ制御[0..1] :レンジデータ :~レンジデータ :~レンジデータ :レンジデータ
:レンジデータ :深度画像 :~深度画像 :~深度画像 :深度画像 :深度画像
4.
ユースケース図の例 指定された目的 地まで自立的に 移動する 周辺環境を 計測する 現在位置を 推定する 移動する 経路を生成 する 障害物を回 避する <<include>> <<extend>> <<include>> <<include>> <<include>> 条件:{移動経路上に障害物が存在する} ユーザ :移動ロボットシステム
5.
ブロック定義図の例 <<block>> 移動ロボットシステム <<block>> 周辺環境計測 <<block>> 測域センサ制御 <<block>> 距離画像センサ制御 <<block>> 自己位置推定 <<block>> 経路生成 <<block>> 障害物回避 <<block>> 移動制御 {XOR} 0..1 0..1 <<block>> 測域センサ <<block>> 距離画像センサ {XOR} 0..1 0..1 <<block>> 移動ロボット <<block>> 駆動輪 <<block>> バッテリ <<block>> 制御装置 1..* 2 1..* <<block>> モータ <<block>> 車輪 <<block>> エンコーダ
6.
<<requirement>> XXXXX Id= text= <<deriveReqt>> :XXXXX <<include>> <<extend>> <<block>> XXXXX 条件:{XXXXX}
Télécharger maintenant