16. (16)
物体認識
機械による画像 · 映像認識
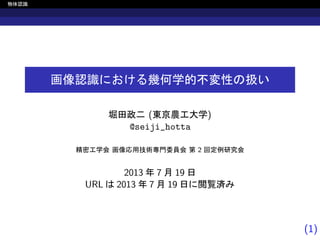
識別部の目的
1x
2x
ghi gp i p hi
gqi
ghp
ghi
gp
i
p
hi
hp
qi
ghi gp i p hi
gqi
ghp
ghi
gp
i
p
hi
hp
qi
ghi gp i p hi
gqi
ghp
ghi
gp
i
p
hi
hp
qi
ghi gp i p hi
gqi
ghp
ghi
gp
i
p
hi
hp
qi
ghi gp i p hi
gqi
ghp
ghi
gp
i
p
hi
hp
qi
1x
2x
未知パターンを精度良く識別できる (汎化能力の高い) 識別
境界を引くこと
51. (51)
物体認識
幾何学的変形にロバストな環境文字認識
参考文献 I
[1] http://pascallin.ecs.soton.ac.uk/challenges/VOC/
[2] 柳井,“一般物体認識の現状と今後,” 情報処理, vol. 48, no. SIG16(CVIM19),
pp. 1–24, 2007.
[3] K. Grauman and B. Leibe, “Visual object recognition,” Synthesis Lectures on
Artificial Intelligence and Machine Learning, Morgan Claypool Publishers,
2011.
[4] http://opencv.jp/
[5] J. Shotton, M. Johnson, and R. Cipolla, “Semantic Texton Forests for Image
Categorization and Segmentation”, CVPR 2008.
[6] P. Yan, S.M. Khan, and M. Shah,“3D Model based Object Class Detection in An
Arbitrary View,” ICCV, 2007.
[7] http://www.vision.caltech.edu/Image_Datasets/Caltech101/
[8] 竹内龍人, “シーンの認識と探索にかかわる視覚のメカニズム,” ITE Tech. Rep.,
vol. 33, no. 24, pp.7–14, 2009.
52. (52)
物体認識
幾何学的変形にロバストな環境文字認識
参考文献 II
[9] Y. Sugita, “Grouping of image fragments in primary visual cortex,” Nature, 1999.
[10] 石井健一郎, 上田修功, 前田英作, 村瀬 洋, “わかりやすいパターン認識,” オーム社,
Aug. 1998.
[11] 村瀬,S.K.Nayar, “2 次元照合による 3 次元物体認識-パラメトリック固有空間法-,”
信学論, no. J77-D-II, vol. 11, pp. 2179–2187, 1994
[12] A. Torralba, et al., “80 million tiny images: A large dataset for non-parametric
object,” IEEE Tran. on PAMI, vol. 30, no. 11, pp. 1958–1970, 2008.
http://groups.csail.mit.edu/vision/TinyImages/
[13] D.G. Lowe, “Distinctive image features from scale-invariant keypoints,” Int’l J.
of Computer Vision, vol. 60, no. 2, pp. 91–110, 2004.
[14] G. Csurka, C.R. Dance, L. Fan, J. Willamowski, and C. Bray, “Visual
categorization with bags of keypoints,” ECCV, 2004.
[15] K. Mikolajczyk and C. Schmid,“Scale Affine Invariant Interest Point
Detectors,” IJCV, vol. 60, no. 1, pp. 63–86, 2004.
53. (53)
物体認識
幾何学的変形にロバストな環境文字認識
参考文献 III
[16] J Yang, et al., “Linear spatial pyramid matching using sparse coding for image
classification,” CVPR 2009.
[17] Y-L. Boureau, et al., “Learning mid-Level features for recognition,” CVPR 2010.
[18] H. Jegou, et al., “Aggregating local descriptors into a compact image
representation,” CVPR 2010.
[19] Xi Zhou, et al., “Image classification using super-vector coding of local image
descriptors,” ECCV 2010
[20] W.M. Campbell, et al., “Support vector machines using GMM supervectors for
speaker verification,” IEEE Signal Processing Lett., vol. 13, pp. 308–311, 2006.
[21] N. Inoue and K. Shinoda, “A fast MAP adaptation technique for
GMMsupervector-based video semantic indexing,” ACM Multimedia, 2011.
[22] F. Perronnin and C. Dance, “Fisher kernels on visual vocabularies for image
categorization,” CVPR 2007.
[23] 原田達也, “大規模画像データを用いた一般画像認識,” SSII 2012.
http://www.isi.imi.i.u-tokyo.ac.jp/~harada/
54. (54)
物体認識
幾何学的変形にロバストな環境文字認識
参考文献 IV
[24] P.Y. Simard, Y. LeCun, J.S. Denker, and B. Victorri, “Transformation invariance
in pattern recognition – Tangent distance and tangent propagation,” Int’l J. of
Imaging Systems and Technology, vol. 11, no. 3, 2001.
[25] 福島邦彦,“位置ずれに影響されないパターン認識機構の神経回路のモデル - ネオコ
グニトロン -,” 信学論 A, vol. J62-A, no. 10, pp. 658–665, 1979.
[26] G.E. Hinton and R.R. Salakhutdinov, “Reducing the dimensionality of data with
neural networks,” Science, vol. 313. no. 5786, pp. 504–507, 2006.
[27] Y. LeCun, L. Bottou, Y. Bengio, and P. Haffner, “Gradient-based learning
applied to document recognition,” Intell. Signal Process., pp. 306–351, 2001.
http://yann.lecun.com/exdb/mnist/
[28] D. Ciresan, et al., “Multi-column deep neural networks for image classification,”
Proc. of CVPR, pp. 3642–3649, 2012.
[29] 岡谷貴之,“ディープラーニングと画像認識への応用,” SSII, pp. OS03-1-11, 2013.
http:
//www.vision.is.tohoku.ac.jp/index.php/download_file/view/41/136/
55. (55)
物体認識
幾何学的変形にロバストな環境文字認識
参考文献 V
[30] K. Higa and S. Hotta, “Local Subspace Classifier with Transformation Invariance
for Appearance-Based Character Recognition in Natural Images,” ICDAR2013, in
press, 2013.
[31] T.E. de Campos, “The Chars74K dataset,”
http://www.ee.surrey.ac.uk/CVSSP/demos/chars74k/
[32] J. Laaksonen, “Local subspace classifier,” Proc. of ICANN ’97, pp. 637–642,
1997.
[33] T.E. de Campos, B.R. Babu, and M. Varna, “Character recognition in natural
images,” Proc. of VISAPP, 2009.
[34] A. J. Newell and L.D. Griffin,“Multiscale histogram of oriented gradient
descriptors for robust character recognition,” Proc. of ICDAR2011,
pp. 1085–1089, 2011.
[35] K. Sheshadri and S.K. Divvala, “ Exemplar Driven Character Recognition in the
Wild,” British Machine Vision Conference, 2012.