Progress report for research paper
•Télécharger en tant que DOCX, PDF•
1 j'aime•465 vues

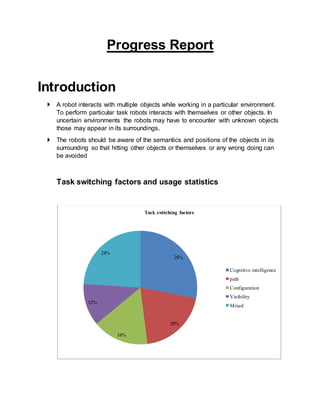
A robot interacts with multiple objects while working in a particular environment. To perform particular task robots interacts with themselves or other objects. In uncertain environments the robots may have to encounter with unknown objects those may appear in its surroundings. The robots should be aware of the semantics and positions of the objects in its surrounding so that hitting other objects or themselves or any wrong doing can be avoided
Signaler
Partager
Signaler
Partager

Recommandé
Autonomous mobile robots have been used to carry out different tasks without continuous human guidance. To achieve the tasks, they must be able to navigate and avoid different kinds of obstacles that faced them. Navigation means that the robot can move through the environment to reach a destination. Obstacles avoidance considers a challenge which robot must overcome. In this work, the authors propose an efficient technique for obstacles avoidance through navigation of swarm mobile robot in an unstructured environment. All robots cooperate with each other to avoid obstacles. The robots detect the obstacles position around them and store their positions in shared memory. By accessing the shared memory, the other robots of the swarm can avoid the detected obstacles when they face them. To implement this idea, the Authors used a MATLAB® and V-REP® (Virtual Robot Experimentation Platform).A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...
A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...AIRCC Publishing Corporation
Recommandé
Autonomous mobile robots have been used to carry out different tasks without continuous human guidance. To achieve the tasks, they must be able to navigate and avoid different kinds of obstacles that faced them. Navigation means that the robot can move through the environment to reach a destination. Obstacles avoidance considers a challenge which robot must overcome. In this work, the authors propose an efficient technique for obstacles avoidance through navigation of swarm mobile robot in an unstructured environment. All robots cooperate with each other to avoid obstacles. The robots detect the obstacles position around them and store their positions in shared memory. By accessing the shared memory, the other robots of the swarm can avoid the detected obstacles when they face them. To implement this idea, the Authors used a MATLAB® and V-REP® (Virtual Robot Experimentation Platform).A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...
A Novel Prototype Model for Swarm Mobile Robot Navigation Based Fuzzy Logic C...AIRCC Publishing Corporation
This presentation shows the robot software functions.Robot Software Functions (By Dr. J. Jeya Jeevahan)
Robot Software Functions (By Dr. J. Jeya Jeevahan)Sathyabama Institute of Science and Technology, Chennai
Contenu connexe
Similaire à Progress report for research paper
This presentation shows the robot software functions.Robot Software Functions (By Dr. J. Jeya Jeevahan)
Robot Software Functions (By Dr. J. Jeya Jeevahan)Sathyabama Institute of Science and Technology, Chennai
Similaire à Progress report for research paper (20)
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
MODEL PREDICTIVE CONTROL BASED JUMPINGOF ROBOTIC LEG ON A PARTICULAR HEIGHT U...
Robot Software Functions (By Dr. J. Jeya Jeevahan)
Robot Software Functions (By Dr. J. Jeya Jeevahan)
IRJET- Swarm Robotics and their Potential to be Applied in Real Life Problems
IRJET- Swarm Robotics and their Potential to be Applied in Real Life Problems
To Ask or To Sense? Planning to Integrate Speech and Sensorimotor Acts
To Ask or To Sense? Planning to Integrate Speech and Sensorimotor Acts
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Page 1 of 14 ENS4152 Project Development Proposal a.docx
Command, Goal Disambiguation, Introspection, and Instruction in Gesture-Free ...
Command, Goal Disambiguation, Introspection, and Instruction in Gesture-Free ...
Intelligent Robotics Navigation System: Problems, Methods, and Algorithm
Intelligent Robotics Navigation System: Problems, Methods, and Algorithm
Plus de Shobhit Saxena
Plus de Shobhit Saxena (19)
Write a program to perform Orthographic projection.
Write a program to perform Orthographic projection.
Dernier
Call Girl Aurangabad Indira Call Now: 8617697112 Aurangabad Escorts Booking Contact Details WhatsApp Chat: +91-8617697112 Aurangabad Escort Service includes providing maximum physical satisfaction to their clients as well as engaging conversation that keeps your time enjoyable and entertaining. Plus they look fabulously elegant; making an impressionable. Independent Escorts Aurangabad understands the value of confidentiality and discretion - they will go the extra mile to meet your needs. Simply contact them via text messaging or through their online profiles; they'd be more than delighted to accommodate any request or arrange a romantic date or fun-filled night together. We provide –(INDIRA) Call Girl Aurangabad Call Now 8617697112 Aurangabad Escorts 24x7
(INDIRA) Call Girl Aurangabad Call Now 8617697112 Aurangabad Escorts 24x7Call Girls in Nagpur High Profile Call Girls
Dernier (20)
Design For Accessibility: Getting it right from the start
Design For Accessibility: Getting it right from the start
chapter 5.pptx: drainage and irrigation engineering
chapter 5.pptx: drainage and irrigation engineering
(INDIRA) Call Girl Aurangabad Call Now 8617697112 Aurangabad Escorts 24x7
(INDIRA) Call Girl Aurangabad Call Now 8617697112 Aurangabad Escorts 24x7
Call Girls In Bangalore ☎ 7737669865 🥵 Book Your One night Stand
Call Girls In Bangalore ☎ 7737669865 🥵 Book Your One night Stand
Cara Menggugurkan Sperma Yang Masuk Rahim Biyar Tidak Hamil
Cara Menggugurkan Sperma Yang Masuk Rahim Biyar Tidak Hamil
VIP Model Call Girls Kothrud ( Pune ) Call ON 8005736733 Starting From 5K to ...
VIP Model Call Girls Kothrud ( Pune ) Call ON 8005736733 Starting From 5K to ...
Block diagram reduction techniques in control systems.ppt
Block diagram reduction techniques in control systems.ppt
Top Rated Call Girls In chittoor 📱 {7001035870} VIP Escorts chittoor
Top Rated Call Girls In chittoor 📱 {7001035870} VIP Escorts chittoor
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
Hazard Identification (HAZID) vs. Hazard and Operability (HAZOP): A Comparati...
Hazard Identification (HAZID) vs. Hazard and Operability (HAZOP): A Comparati...
Call Girls Wakad Call Me 7737669865 Budget Friendly No Advance Booking
Call Girls Wakad Call Me 7737669865 Budget Friendly No Advance Booking
Progress report for research paper
- 1. Progress Report Introduction A robot interacts with multiple objects while working in a particular environment. To perform particular task robots interacts with themselves or other objects. In uncertain environments the robots may have to encounter with unknown objects those may appear in its surroundings. The robots should be aware of the semantics and positions of the objects in its surrounding so that hitting other objects or themselves or any wrong doing can be avoided Task switching factors and usage statistics 28% 20% 16% 12% 24% Task switching factors Cognitive intelligence path Configuration Visibility Mixed
- 2. In the review we have discussed about task switching. Depending upon the nature of task like static and dynamic different frame works have been analyzed. When autonomous robots switch from one task to other, the task switching criterias like time, path, visibility, configuration etc are taken into consideration. Task regrouping helps in accomplishing the task easily with less time and cost. Multi tasking done by a single robot and by a group of robots are also analyzed. Multi tasking in uncertain environment is discussed and we have also reviewed the natural language interfaces to robots and cognitive message exchange. Multi tasking with cognitive intelligence of robots have been studied and application of natural language, human facial emotion and body gesture analysis have been done while multi tasking. Different types of robots like service robots, industrial robots, under water and aerial robots have been discussed as case studies for multi tasking. This review guarantees the following findings about task switching applying cognitive capabilities in a multi object and multi tasking environment. It is evident that the robots learn to predict future tasks and actions in uncertain dynamic environments. Robots are trained about the semantics of the environments and can predict and manipulate dynamic objects those interfere in their work environment. This helps the robots to avoid hitting themselves or other objects