Téléchargé 99 fois



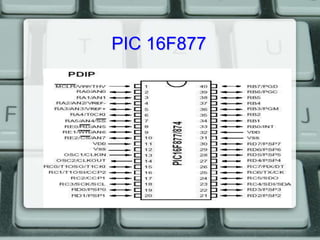
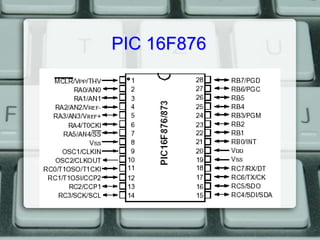
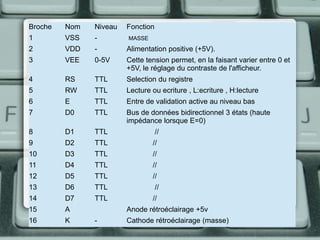

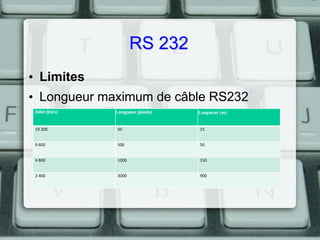


Le document traite des microcontrôleurs, en particulier des modèles PIC16F877 et PIC16F876, en détaillant leurs caractéristiques, fonctionnalités, et différences. Il aborde également des éléments tels que les afficheurs LCD, les claviers à 12 touches, les communications RS-232 et I2C, ainsi que des outils de développement comme Proteus et MPLAB. Les microcontrôleurs sont présentés comme des composants essentiels dans de nombreuses applications, offrant une interface conviviale et des capacités variées.



































































