Etude et Conception
d’unbras Manipulateur
Ecole d’ingénieur privé en Tunisie /Université
polytechnique international
Encadré par :
Saida Ben Massoud
Réalisé par :
Ghazouani Douaa
Khelifi Eya
2.
Introduction Cadre denotre
projet
Conception
sur Solidworks Commande et
Réalisation du bras
Manipulateur
01 02
04 05
Plan
03
Simulation sur
Matlab
INTRODUCTION
Les robots manipulateurssont actuellement d'une très large
utilisation dans plusieurs applications à savoir comme
-le domaine industriel
-le domaine de la santé
-logistique et transport
-Agriculture ….
Leur importance réside dans leur aptitude à accomplir des
tâches fastidieuses, monotones et parfois dangereuses.
5.
Exemples des taches
effectuées
l'industrie
manufacturière
Assemblage
Manutention
Peinture ou
application de
revêtements
Soudage…
la logistique et
la manutention
Prise et placement
(Pick and Place) :
Empilage et dés
empilage
Tri d’objets
La Santé
Chirurgie
assistée par
robot
Manipulation de
matériaux
biologiques
Rééducation et
thérapie
L’agriculture
Récolte
Tri et emballage
Plantation et
entretien
6.
Problématique
Comment concevoir unbras
manipulateur capable de
manipuler des objets de manière
rapide, précise et polyvalente, tout
en garantissant une fiabilité
adaptée aux environnements
industriels variés ?
Choix du brasmanipulateur:
un bras manipulateur spécialisé dans le
déplacement d'objets (Pick and Place )
Aspects techniques du choix
Utilisation par tous
Précision et répétabilité
Flexibilité des outils de préhension
Vitesse et efficacité
Automatisation des tâches répétitives
Intégration facile dans des systèmes existants
Objectif du projet
Répondre aux besoins d'une
manipulation répétitive et
précise dans des
environnements industriels.
Avant la fabricationdu bras manipulateur, une simulation sous MATLAB a permis de valider les
mouvements, les angles des servomoteurs et le comportement cinématique du système. Cela a aidé à
anticiper les contraintes et à optimiser la conception.
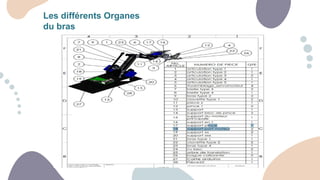
Les différents composantsélectroniques à
utiliser
Servo-Moteurs
-éviter le surcharge de bras
-contrôler les articulations
-minimiser le poids de l’organe
de bras afin d’avoir un bras
stable
Module d'extension PCA9685
-contrôler jusqu’à 16 servomoteurs en
générant des signaux PWM via une
connexion I2C, ce qui libère la carte
Arduino et facilite la gestion de plusieurs
moteurs.
Carte Arduino
programmer et contrôler des microcontrôleurs
pour interagir avec des capteurs, moteurs
21.
Fabrication des piècesmécaniques
Les pièces mécaniques du robot ont été fabriquées par impression 3D,
afin d’obtenir une solution rapide, économique et sur mesure.
L’imprimante utilisée est une Ultimaker S7, connue pour sa précision et
sa fiabilité.
CONCLUSION
Ce projet nousa permis de concevoir et de réaliser un bras
manipulateur fonctionnel, en combinant de connaissances en
mécanique, électronique et programmation. Grâce à l’utilisation
d’un Arduino, de servomoteurs, et du module PCA9685, nous
avons pu commander le bras de manière automatique, sans
intervention manuelle. Ce travail a renforcé notre compréhension
des systèmes embarqués et des principes de la robotique
appliquée.
🔜 Perspectives
Pour la suite, plusieurs améliorations sont envisageables :
● Intégrer des capteurs pour rendre le bras plus autonome
(détection d’objets, retour d’effort).
● Ajouter une interface utilisateur (écran LCD, application mobile,
etc.).
● Étendre les degrés de liberté pour des mouvements plus
complexes.
● Utiliser l’intelligence artificielle ou la vision par ordinateur pour des
tâches plus avancées.
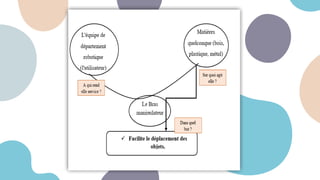
#9 Notre bras Manipulateur rend service à l’equipe de departemnet robotique l’utilisateur en générale et qui agit sur la matiere quelque soit sa nature bois , plastique , metal …. Pour faciliter le deplacement des objets
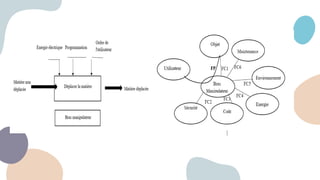
#10 FP : Interagir sur un objet à travers le bras robotique.
FC1 : Pilotage à distance via potentiomètres ou application.
FC2 : Assurer la sécurité de l’operateur
FC3 : Moins cher que le commerce
FC4 : S’adapter à la source d’énergie disponible
FC5 : Capable de travailler dans un environnement industriel
FC6 : Soit maintenable.









![PPT_ROBOTIQUE[1][2][1]23ddnnfnfn44nnf.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptrobotique121-240805211059-e207bfcd-thumbnail.jpg?width=640&height=640&fit=bounds)
























