Télécharger pour lire hors ligne













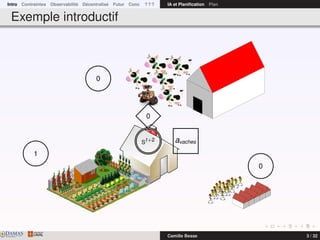



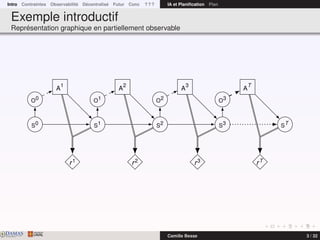



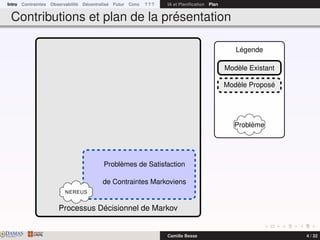

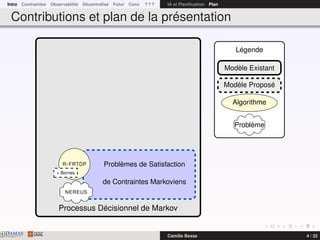


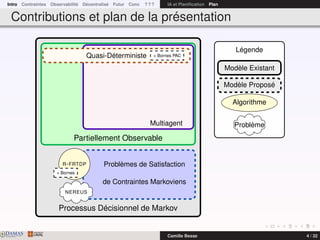






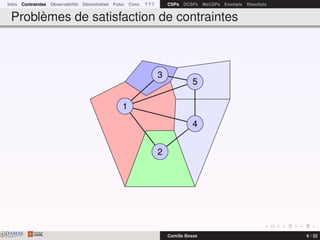













































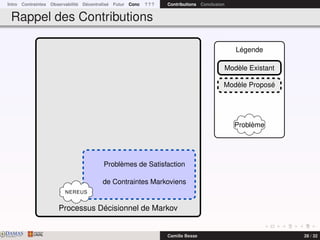



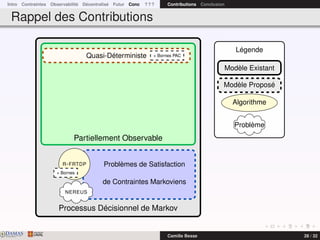
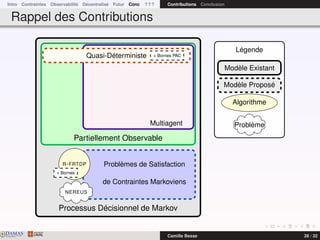


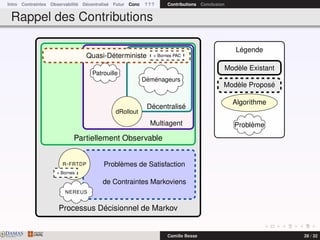






La présentation de Camille Besse aborde les contraintes et l'observabilité dans les systèmes de Markov décentralisés, avec un accent sur leur application à des tâches de planification dans un contexte de robotique agricole. Elle se compose largement d'illustrations et d'exemples, rendant le contenu accessible à un large public. Les méthodes proposées incluent des algorithmes pour gérer des problèmes de satisfaction de contraintes dans divers contextes observables et multi-agents.














