1. Кинематика Лекция 13
4. ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
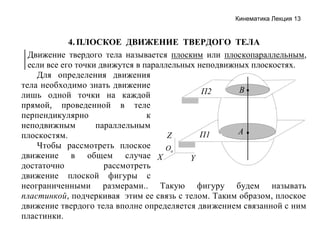
Движение твердого тела называется плоским или плоскопараллельным,
если все его точки движутся в параллельных неподвижных плоскостях.
Для определения движения
тела необходимо знать движение
В
П2
лишь одной точки на каждой
прямой, проведенной в теле
перпендикулярно
к
неподвижным
параллельным
А
П1
плоскостям.
Z
Чтобы рассмотреть плоское
Oa
движение в общем случае X
Y
достаточно
рассмотреть
движение плоской фигуры с
неограниченными размерами.. Такую фигуру будем называть
пластинкой, подчеркивая этим ее связь с телом. Таким образом, плоское
движение твердого тела вполне определяется движением связанной с ним
пластинки.
2. Кинематика Лекция 13
1. Уравнения движения
Введем в рассмотрение
Y
систему координат OXYZ с
началом в полюсе О, оси
y
M
которой в любой момент
Y
y
времени: OX //Oa X , OY //OaY ,
x
x ϕ
OZ //Oa Z . Положение системы Y
O
O
X
координат Oxyz, а значит и
пластинки,
однозначно
определяются
координатами
X
XO
полюса X O , YO и углом Oa
поворота ϕ ,
Таким образом, при плоском движении твердое тело имеет три
степени свободы и три функции времени
X O = X O ( t ) , YO = YO ( t ) , ϕ = ϕ ( t )
(4.1)
определяют положение пластинки в любой момент времени и
называются уравнениями плоского движения твердого тела.
3. Кинематика Лекция 13
2. Разложение плоского движения твердого тела на
поступательное и вращательное
Система координат OXYZ совершает поступательное движение в
неподвижной системе координат, которое задается двумя уравнениями
X O =X O (t ), YO =YO (t ) .
(4.2)
Пластинка в системе координат OXYZ совершает вращательное
движение, которое определяется уравнением
ϕ= (t ) .
ϕ
(4.3)
Таким образом, плоское движение твердого тела в неподвижной
системе координат Oa XYZ можно представить как сложное
движение, состоящее из переносного поступательного движения
системы координат OXYZ и относительного вращательного
движения в подвижной системе координат OXYZ.
4. Кинематика Лекция 13
3. Угловая скорость и угловое ускорение тела
Угловая скорость
пластинки
(4.4)
ω = ω z k , ω z = ϕ , ω = ω z ,
и угловое ускорение
(4.5)
ε = ε z k , ε z = ω я = ϕ, ε = ε z .
Теорема. Угловая скорость и угловое ускорение пластинки не зависят от
выбора полюса.
Y
Доказательство.. Из
y
x
рисунка видно, что
ϕA+α = ϕB+ β .
Y
Тогда,
учитывая
что
Y
и
α = const
β = const ,
y
получим
ϕ A = ϕ B или ω Az = ω Bz .
А
и
Oa
ω Az = ω Bz или ε Az = ε Bz .
β
α
ϕ
А
В
ϕВ
X
x
X
X
5. Кинематика Лекция 13
1. Скорости точек тела
VM
Для любой произвольно
выбранной точки М пластинкиее
Y
VO
абсолютная скорость Va = VM ,
VMO
y
согласно теореме о сложении
M
Y
скоростей, будет равна
VO
x
VM = Ve + Vr = VO + [ ω , OM ] ,
ϕ
YO
Обозначим: VMO = [ ω ,OM ].
O
X
ω
Таким образом, скорость
любой точки тела при плоском
XO
X
движении
определяется Oa
формулой
(4.7)
VM = VO + VMO
где VO – скорость полюса, VM O – скорость точки М относительно
полюса О ( VMO ⊥ OM , VMO = ω ⋅ OM ) .
6. Кинематика Лекция 13
1. Скорости точек тела
VM
Для любой произвольно
выбранной точки М пластинкиее
Y
VO
абсолютная скорость Va = VM ,
VMO
y
согласно теореме о сложении
M
Y
скоростей, будет равна
VO
x
VM = Ve + Vr = VO + [ ω , OM ] ,
ϕ
YO
Обозначим: VMO = [ ω ,OM ].
O
X
ω
Таким образом, скорость
любой точки тела при плоском
XO
X
движении
определяется Oa
формулой
(4.7)
VM = VO + VMO
где VO – скорость полюса, VM O – скорость точки М относительно
полюса О ( VMO ⊥ OM , VMO = ω ⋅ OM ) .