

Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Line follower12
Similaire à Line follower12 (20)
Dernier
Dernier (20)
Line follower12
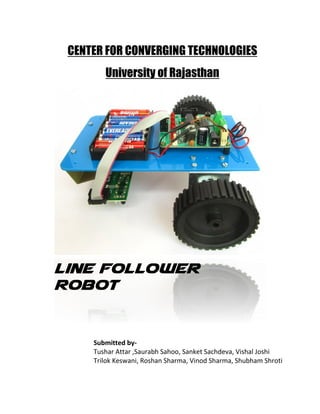
- 1. CENTER FOR CONVERGING TECHNOLOGIES University of Rajasthan Line Follower Robot Submitted by- Tushar Attar ,Saurabh Sahoo, Sanket Sachdeva, Vishal Joshi Trilok Keswani, Roshan Sharma, Vinod Sharma, Shubham Shroti
- 2. 1 OBJECTIVE To design a line follower using Arduino kit.. MATERIALS REQUIRED Arduino kit, 9V batteries, black tape, USB wire, chassis, connecting wires. PRINCIPLE What is Arduino? Arduino is a tool for making computers that can sense and control more of the physical world than a desktop computer. It's an open- source physical computing platform based on a simple microcontroller board, and a development environment for writing software for the board. This robot is designed to continuously follow a black line painted on a bright surface or a white line on a dark surface and take the turns along with the line automatically. For situations such as cross over where the robot can have more than one path that can be followed, predefined path must be followed by the robot. .
- 3. 2 To make the robot follow the black line, IR sensors are employed with the fact that black surface absorbs light and white surface reflects light. The sensors are mounted on left front end and right front end of the robot keeping the black line lies in between them. Until sensors are getting the reflected light, the comparator sends logic 1 to the microcontroller and the microcontroller in turn switches ON the motor associated with the sensor and when any of the sensors comes up on the black line the microcontroller stops the motor associated with that sensors and make the robot to turn in the direction of the black line.
- 4. 3 Fig. Working of IR Sensors Fig. IR Sensors A passive infrared sensor (PIR sensor) is an electronic sensor that measures infrared (IR) light radiating from objects in its field of view. They are most often used in PIR-based motion detectors.
- 6. 5 Line-Follower Concept When both left and right sensor are sensing white, means black line is in between and bot goes forward. When Right sensor senses black means a Right Turn. Turn off the Right Motor so that it turns Right until Right Sensor senses white again. Similarly for Left turn. Line-Follower Robot.
- 7. 6 Program to run motor int switchpin = 9; // switch input int motor1pin1 = 3; // pin 2 on L293D int motor1pin2 = 4; // pin 7 on L293D void setup() { // set the switch as an input: pinMode(switchpin, INPUT); // set all the other pins you're using as outputs: pinMode(motor1pin1, OUTPUT); pinMode(motor1pin2, OUTPUT); } void loop() { // if the switch is high, motor will turn on one direction: if (digitalRead(switchpin) == HIGH) { digitalWrite(motor1pin1, HIGH); // set pin 2 on L293D high digitalWrite(motor1pin2, LOW); // set pin 7 on L293D low } // if the switch is low, motor will turn in the opposite direction: else { digitalWrite(motor1pin1, LOW); // set pin 2 on L293D low digitalWrite(motor1pin2, HIGH); // set pin 7 on L293D high } }
- 8. 7 APPLICATIONS OF LINE FOLLOWER-: o Industrial Applications: These robots can be used as automated equipment carriers in industries replacing traditional conveyer belts. o Automobile applications: These robots can also be used as automatic cars running on roads with embedded magnets. o Domestic applications: These can also be used at homes for domestic purposes like floor cleaning etc. o Guidance applications: These can be used in public places like shopping malls, museums etc to provide path guidance.