
Recommandé
Contenu connexe
Tendances
Tendances (20)
Similaire à Konsep Sinyal dan Sistem
Similaire à Konsep Sinyal dan Sistem (20)
Plus de yusufbf
Plus de yusufbf (20)
Dernier
Dernier (20)
Konsep Sinyal dan Sistem
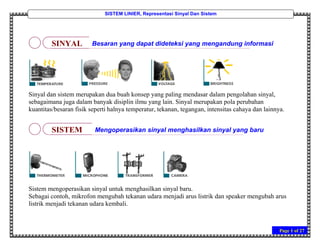
- 1. Page 1 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sinyal dan sistem merupakan dua buah konsep yang paling mendasar dalam pengolahan sinyal, sebagaimana juga dalam banyak disiplin ilmu yang lain. Sinyal merupakan pola perubahan kuantitas/besaran fisik seperti halnya temperatur, tekanan, tegangan, intensitas cahaya dan lainnya. Sistem mengoperasikan sinyal untuk menghasilkan sinyal baru. Sebagai contoh, mikrofon mengubah tekanan udara menjadi arus listrik dan speaker mengubah arus listrik menjadi tekanan udara kembali. SINYAL Besaran yang dapat dideteksi yang mengandung informasi SISTEM Mengoperasikan sinyal menghasilkan sinyal yang baru
- 2. Page 2 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Salah satu cara untuk mengklasifikasi sinyal adalah berdasarkan sifat dari variabel bebasnya. Jika variabel bebas tersebut kontinyu, maka sinyal tersebut Sinyal Waktu Kontinyu. Suatu sinyal waktu kontinyu x(t) disebut diskontinyu (amplitudonya) saat t = t1, jika : x(t1 - ) x (t1 + ), dimana t1 - t1 - dan t1 + - t1 adalah bilangan positip sangat kecil. Jika sinyal x(t) kontinyu untuk semua t, maka sinyal x(t) disebut sinyal kontinyu, sedangkan jika x(t) kontinyu untuk semua t kecuali pada beberapa titik, maka sinyal x(t) disebut “kontinyu persegmen” (piecewise continuous). Sebagai contoh, fungsi pulsa persegi rect (t/ ) yang didefinisikan sebagai berikut : 2/|t|,0 2/|t|,1 )/t(rect Jika variabel bebas hanya memiliki nilai diskrit t = kTs, dimana Ts adalah bilangan riil positip tetap, dan k himpunan bilangan bulat (k = 0, 1, 2, ...), maka sinyal yang bersesuaian x(kTs) disebut Sinyal Waktu Diskrit. KLASIFIKASI SINYAL Sinyal Waktu Kontinyu – Sinyal Waktu Diskrit 1 2/ 1 2/ rect( 2/ )
- 3. Page 3 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sinyal waktu kontinyu yang memenuhi kondisi x(t) = x(t + kT), k = 1, 2, … dimana T adalah konstanta (perioda dasar), diklasifikasikan sebagai sinyal periodik. Suatu sinyal x(t) yang tidak periodik disebut sinyal aperiodik/nonperiodik. Penjumlahan dua sinyal periodik : z(t) = ax(t) + by(t), dengan : x(t) = x(t + kT1) y(t) = y(t + lT2) dimana k dan l adalah bilangan bulat. Maka : z(t) = z(t + T) = ax(t + T) + by(t + T) = ax(t + kT1) + by(t + lT2) Jadi T = kT1 = lT2, atau T1/T2 = l/k. Karena sinyal periodik merupakan sinyal dengan durasi tak berhingga (mulai t = - sampai t = ), maka semua sinyal dalam praktek dikategorikan sinyal nonperiodik. KLASIFIKASI SINYAL Sinyal Periodik – Sinyal Tidak Periodik
- 4. Page 4 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Misalkan x(t) menyatakan tegangan pada tahanan R, maka arus yang dihasilkan adalah i(t) = x(t)/R. Daya sesaat dari sinyal , R i2 (t) = x2 (t)/R dan energi yang dikeluarkan dalam interval dt adalah x2 (t)/R dt. Secara umum, kita tidak perlu mengetahui apakah x(t) berupa tegangan atau arus, dan untuk normalisasi daya, diasumsikan R = 1 . Maka daya sesaat dari sinyal x(t) adalah x2 (t). Energi total dari sinyal dalam interval t ( -, ) didefinisikan sebagai L LL dttxLimE 2 |)(| Daya rata-ratanya didefinisikan sebagai : L LL dttx L LimP 2 |)(| 2 1 Apabila 0< E < , maka sinyal x(t) disebut sinyal energi. Sinyal energi memiliki daya nol. Apabila 0 < P < , maka sinyal x(t) disebut sinyal daya. Sinyal daya memiliki energi tak berhingga. Untuk sinyal diskrit x[n], energi total dan daya rata-ratanya didefinisikan sebagai : N Nn N nxnxLimE n 22 |][||][| N Nn N nx N LimP 2 |][| 12 1 KLASIFIKASI SINYAL Sinyal Daya dan Sinyal Energi
- 5. Page 5 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sinyal x(t-t0) menyatakan sinyal x(t) digeser (sumbu waktunya) sebesar t0. Jika t0 > 0, maka sinyal tersebut dilambatkan / didelay sebesar t0 detik. Secara fisik, t0 tidak boleh berharga negatif, tetapi secara analitik x(t-t0), untuk t0 < 0 menyatakan tiruan dari x(t) yang dimajukan waktunya sebesar t0. Operasi Pergeseran - t1 0 t1 t TRANSFORMASI SINYAL Operasi Pergeseran x(t) 0 t0- t1 t0 t0+t1 x(t-t0)
- 6. Page 6 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sinyal x(-t) menyatakan sinyal x(t) yang direfleksikan terhadap t = 0. Untuk sinyal diskrit, x[-n] menyatakan sinyal x[n] yang direfleksikan terhadap n = 0. Operasi Refleksi Perlu diperhatikan bahwa operasi pergeseran dan refleksi ini tidak komutatif. 0 1 0 -1 -1 -2 -2-3-4 x(-t) x(-t-3) t t 0 1 0 1 2 2 3 4 -1 x(t) x(3-t) t t TRANSFORMASI SINYAL Operasi Refleksi -5
- 7. Page 7 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sinyal x(t) disebut sebagai sinyal genap jika berlaku x ( -t ) = x ( t ) Dan disebut sinyal ganjil jika berlaku x ( -t ) = -x ( t ) Sinyal sebarang x(t) selalu dapat dinyatakan sebagai jumlah dari sinyal genap dan ganjil : x ( t ) = xe ( t ) + xo ( t ) Dimana xl (t) adalah bagian genap dari x(t), yang diberikan oleh : xe ( t ) = ½ [ x ( t ) + x ( -t )] Sedangkan x0(t) adalah bagian ganjil dari x(t), x0(t) dapat diperoleh dari xo ( t ) = ½ [ x ( t ) – x ( - t )] Dengan cara yang sama, definisi diatas juga berlaku untuk sinyal diskrit . KLASIFIKASI SINYAL Sinyal Ganjil dan Genap
- 8. Page 8 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sinyal 0t,0 0t,)exp( )( tA tx Bagian ganjil dari sinyal x(t) adalah : Sedangkan bagian genap sinyal x(t) adalah : |)|exp( 2 1 0t,)exp( 2 1 0t,)exp( 2 1 )( tA tA tA txl KLASIFIKASI SINYAL Contoh Sinyal Ganjil dan Genap 0t,)texp(A 2 1 - 0t,)texp(A 2 1 )t(x0 0 t 0 t xe(t) xo(t) A/2 -A/2 A/2
- 9. Page 9 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Variabel bebas dari sinyal waktu kontinyu x(t) dapat diskala dengan parameter . Jika | | > 1 , maka x ( t ) menyatakan x(t) yang disusutkan interval waktuya. Jika | | <1 , maka x ( t ) menyatakan x(t) yang dikembangkan interval waktunya. Contoh : Operasi Penyekalaan Waktu TRANSFORMASI SINYAL Penyekalaan Waktu -1 0 1 t x(t) 2 x(2t) 2 -1 0 1 t -2 -1 0 1 2 t x(t/2 ) 2
- 10. Page 10 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem No Sinyal Dasar Fungsi Grafik 1 Unit Step 0t,0 0t,1 )(tu 2 Unit Ramp 0t,t 0t, )( t tr 3 Unit Impulse 2 1 21 0t)0()()( t t txdtttx 4 Sampling t tSin tSa )( t SINYAL DASAR Sinyal Waktu Kontinyu Elementer u(t) 1 t r(t) 1 1 t t t Sa(t)1 2 33 2
- 11. Page 11 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sifat-sifat fungsi impuls satuan : (i) )0( (ii) 0t,0)( t (iii) 1)( dtt (iv) (t) merupakan fungsi genap, yaitu (t)=(-t) Sifat-sifat operasi fungsi impuls (i) Sifat Pergeseran 2 1 lainyang,0 t,)( )()( 2010 0 t t tttx dttttx atau secara umum dtxtx )()()( yang menyatakan x(t) sebagai penjumlahan kontinyu impuls berbobot SINYAL DASAR Fungsi Impuls Satuan
- 12. Page 12 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem (ii) Sifat Sampling Jika x(t) kontinyu di t0, maka x ( t ) ( t- t0) = x ( t0 ) ( t-t0 ) (iii) Sifat scalling )( || 1 )( b a t a bat Relasi antara sinyal unit impulse, unit step dan unit ramp diberikan oleh persamaan berikut : t d)()t(u t d)(u)t(r SINYAL DASAR Fungsi Impuls Satuan
- 13. Page 13 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem No Sinyal Dasar Fungsi Grafik 1 Unit Impulse 0n,0 0n,1 ][n 2 Unit Step 3 Sekuen Eksponensial x[n] = C n SINYAL DASAR Sinyal Waktu Diskrit Elementer u n n n [ ] , , 1 0 0 0 [n] n u[n] 0 1 2 3 4 n 1 1 x[n] 0 1 2 3 4 n C
- 14. Page 14 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Representasi Orthogonal dari suatu sinyal dapat mempermudah perhitungan dan juga berfungsi untuk memberikan perhitungan visualisasi sinyal sebagai suatu vektor dalam sistem koordinat tegak lurus (orthogonal) dimana gelombang orthogonal sebagai koordinat satuan Suatu himpunan sinyal i , i = 1,2,3,... disebut orthogonal dalam interval (a,b) jika b a k kl E dttt kl,0 kl, )()( )( klEk dimana superscript * menunjukkan kompleks sekawan dan [l-k] disebut fungsi delta Kronecker yang didefinisikan sebagai : kl,0 kl,1 )( kl Jika Ek = 1 maka i (t) disebut sinyal “Orthogonal”. Normalisasi setiap himpunan i(t) dapat dilakukan dengan membagi setiap sinyal dengan iE . SINYAL Representasi Orthogonal
- 15. Page 15 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Misalkan i (t) adalah himpunan orthogonal dalam interval a < t < b, dan x(t) adalah sinyal yang diketahui dengan energi berhingga dalam interval yang sama, maka x(t) dapat dinyatakan dalam i(t) dengan menggunakan deret konvergen i ii tCtx )()( dimana b a ii dtttxC 2,...1,0,i,)()( Jika x(t) himpunan orthogonal , maka Ci berbentuk 1,...0,k,)()( 1 dtttx E C b a k k k Representasi deret ini disebut generalisasi deret Fourier dan konstanta Ck disebut koefisien Fourier. Tinjauan lebih jauh tentang deret Fourier akan diberikan pada pokok bahasan lebih lanjut. SINYAL Representasi Orthogonal
- 16. Page 16 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Sebagaimana sinyal, sistem juga dapat diklasifikasikan menjadi sistem waktu kontinyu dan sistem waktu diskrit. Disamping sistem waktu kontinyu dan waktu diskrit, terdapat sistem gabungan (Hybrid), yang mentransformasi sinyal input waktu kontinyu menjadi sinyal output waktu diskrit atau sebaliknya. (a) Sistem waktu kontinyu (b) Sistem waktu diskrit Sistem waktu kontinyu Sistem waktu diskrit (a) (b) input : x(t) input : x[n] output : y(t) output : y[n] SISTEM Sistem Waktu Kontinyu dan Sistem Waktu Diskrit
- 17. Page 17 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Hubungan seri / cascade Hubungan Paralel Hubungan Seri Paralel Hubungan Umpan Balik (Feedback) SISTEM Hubungan Antar Sistem input outputsistem 1 sistem 2 input sistem 1 sistem 2 output sistem 1 sistem 2 sistem 3 sistem 4input output sistem 1 sistem 2 input output - +
- 18. Page 18 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Suatu sistem adalah linier, jika memenuhi : a. x1(t) + x2(t) y1(t) + y2(t) ( sifat aditif ) b. x1(t) y1(t) ( sifat homogen ) Dua sifat di atas dapat di kombinasi menjadi satu pernyataan berikut (contoh waktu diskrit) : x1[n] + x2 [n] y1[n] + y2 [n] suatu sistem disebut non linier jika tidak memenuhi di atas. Contoh 1 : ; R1 = R2 = 1 ohm jika x(t) = ax1(t) + b x2(t), maka ; y(t) = ½ x(t) = ½ {ax1(t) + bx2(t)} = ½ a x1(t) + bx2(t) = ay1(t) + by2(t) dimana, y1(t) = ½ x1(t) dan y2(t) = ½ x2 (t) Jadi sistem di atas menunjukkan contoh sistem linier. R1 R2 + _ y(t) x(t) KLASIFIKASI SISTEM Sistem Linier / Non Linier )t(x 2 1 )t(x RR R y(t) 21 2
- 19. Page 19 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Contoh 2 : Untuk sistem di samping, diperoleh : t t dxt RCRC tt RCRC ty ty 0 00 tt,,)()( 1 exp 1 )( 1 exp )0( )( Jika input x(t) = x1(t) + x2(t) , maka ; )()()( 1 exp RC )()()( 1 exp)( 1 exp )( )( t t 2 10 0 0 0 dxt RC dxt CRRC tt RCRC ty ty t t Untuk contoh di atas, jika input x1(t) dan x2(t) menghasilkan output y1(t) dan y2(t), maka ; t t dxt RCRC tt RCRC ty tyty 0 )()( 1 exp 1 )( 1 exp )( )()( 10 0 21 t t dxt RCRC tt RCRC ty 0 )()( 1 exp 1 )( 1 exp )( 20 0 t t dxxt RCRC 0 )()()( 1 exp 1 21 Sistem seperti ini dapat digolongkan sebagai “incrementally linier system". R C + _ y(t) x(t) i(t) KLASIFIKASI SISTEM Sistem Linier / Non Linier
- 20. Page 20 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Suatu sistem disebut time-invariant jika pergeseran waktu pada input menyebabkan pergeseran waktu yang sama pada output, sehingga : jika x(t) y(t), maka x(t - t0) y(t - t0). Contoh 1 : Sistem waktu kontinyu : y(t) = cos x(t) Untuk sistem ini y(t-t0) = cos x(t-t0), sedangkan jika diberi input x1(t) = x(t-t0), maka ; y1(t) = cos x1 ( t ) = cos x ( t - t0 ) = y ( t - t0 ) Jadi sistem tersebut termasuk sistem time-invariant (tidak berubah waktu ), KLASIFIKASI SISTEM Sistem Time Invariant / Time-Varying
- 21. Page 21 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Suatu sistem disebut “memoryless” (tanpa memory) jika outputnya untuk tiap-tiap nilai variabel bebas hanya bergantung pada input pada saat yang sama. Contoh : Apakah sistem berikut termasuk tanpa memory / dengan memory ? a. y [ n ] = x [ n ] b. y ( t ) = x ( t -1 ) c. n k x[k]y[n] d. t d)(x C 1 )t(y e. y(t) = R x (t) KLASIFIKASI SISTEM Sistem dengan Memory / Tanpa Memory
- 22. Page 22 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Suatu sistem disebut causal (disebut juga dapat direalisasikan secara fisik), jika output pada setiap waktu, bergantung hanya pada input saat itu dan input sebelumnya. Sistem yang tidak causal disebut noncausal (anticipatory) Contoh : sistem causal : y (t) = x ( t- 2 ) ; y [ n ] = x [ n ] sistem noncausal : y (t) = x ( t+2 ) ; y [ n ] = x [ n ] -x [ n+1 ] KLASIFIKASI SISTEM Sistem Causal
- 23. Page 23 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Suatu sistem disebut invertible jika dengan mengamati output, kita dapat mengamati inputnya. Yaitu kita dapat menyusun suatu sistem inversi yang jika diseri dengan sistem aslinya, maka menghasilkan output yang sama dengan input sistem aslinya. Gambar berikut menunjukkan konsep sistem inversi Contoh : Tentukan apakah sistem berikut invertible ! Jika ya dapatkan sistem inversnya! a. y ( t ) = 2 x ( t ) b. y ( t ) = cos x ( t ) c. t 0)y(-,d)(x)t(y d. y ( t ) = x ( t + 1 ) x[n] z[n]=x[n]sistem sistem inversi y[n] KLASIFIKASI SISTEM Sistem invertible / Noninvertible
- 24. Page 24 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Ada banyak cara untuk menentukan stabilitas suatu sistem. Salah satu caranya adalah stabilitas BIBO (Bounded Input Bounded Output ). Suatu sistem disebut stabil jika untuk setiap input yang bounded, maka outputnya juga bounded. Yaitu : |x ( t )|< 1< |y (t) | < 2 < Contoh : Tentukan apakah sistem berikut stabil BIBO ? a. y (t) = exp [x (t)] b. d)(x)t(y c. k ]n[x]n[y KLASIFIKASI SISTEM Sistem Stabil / Tidak Stabil
- 25. Page 25 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Diskripsi Matematik yang dapat menggambarkan perilaku suatu sistem disebut model matematik. Model matematik dapat disajikan dalam beberapa bentuk yang berbeda, bergantung pada kondisi sistem dan keperluan. Untuk sistem dinamis, model matematik yang banyak digunakan adalah : Integral ( Penjumlahan ) Konvolusi Persamaan Differensial / Persamaan Beda Persamaan Ruang - Keadaan (State-Space) Fungsi Alih Tinjauan lebih jauh tentang hal ini dibahas dalam Bab 2 untuk sistem waktu kontinyu, dan Bab 6 untuk sistem waktu diskrit. REPRESENTASI SISTEM Model Matematik
- 26. Page 26 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Diagram Blok adalah representasi hubungan sebab akibat antara input dan output suatu sistem dengan menggunakan gambar. Kotak pada diagram blok berisi nama elemen atau sistem atau simbol operasi matematik yang dilakukan terhadap input untuk menghasilkan output. Contoh : tinjau sistem rangakaian RC yang telah dibahas sebelumnya + outputx[n] blok x(t) y(t)1/R C dt i(t) _ REPRESENTASI SISTEM Diagram Blok R C + _ y(t)x(t) i(t) + _
- 27. Page 27 of 27 SISTEM LINIER, Representasi Sinyal Dan Sistem Grafik Aliran Sinyal adalah suatu diagram yang menggambarkan persamaan simultan suatu sistem. Grafik aliran sinyal terdiri dari : simpul (node) yang menyatakan variable sistem, dan garis berarah (cabang) yang menyatakan fungsi transmisi atau penguatan sinyal. Contoh : grafik aliran sinyal untuk sistem rangkaian RC sebelumnya dapat digambarkan sebagai berikut : REPRESENTASI SISTEM Grafik Aliran Sinyal 1/R -1/R x(t) i(t) y(t) C dt