Corrige1 si-1-mines-mp-2007
•
0 j'aime•1,753 vues

pour plus de cours et exercices corrigés, visitez : www.touscours.net

Recommandé
Contenu connexe
En vedette
En vedette (20)
Plus de Achraf Ourti
Plus de Achraf Ourti (20)
Corrige1 si-1-mines-mp-2007
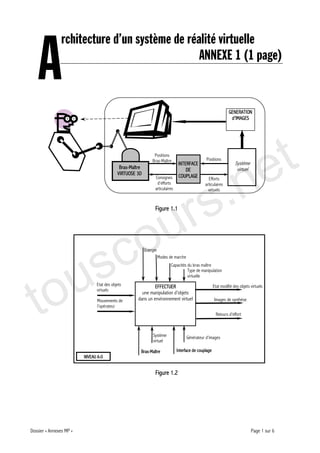
- 1. rchitecture d’un système de réalité virtuelle A ANNEXE 1 (1 page) GENERATION d’IMAGES e t .n Positions Bras-Maître Positions INTERFACE Système Bras- Bras-Maître DE virtuel s VIRTUOSE 3D COUPLAGE Consignes Efforts r d’efforts articulaires articulaires virtuels u Figure 1.1 s c o u Energie Modes de marche to Capacités du bras maître Type de manipulation virtuelle Etat des objets EFFECTUER Etat modifié des objets virtuels virtuels une manipulation d’objets Mouvements de dans un environnement virtuel Images de synthèse l’opérateur Retours d’effort Système Générateur d’images virtuel Bras- Bras-Maître Interface de couplage A- NIVEAU A-0 Figure 1.2 Dossier « Annexes MP » Page 1 sur 6
- 2. D iagramme FAST FT1 RESTITUER selon 3 directions une image des résistances mécaniques rencontrées par le système virtuel FT2 COUPLER FT1.1 FT1.1 DETERMINER les consignes d’effort sur chaque axe FT1.2 GENERER FT1.2 dans les 3 directions des actions mécaniques homothétiques de celles ANNEXE 2 (1 page) FT1.2.1 FT1.2.1 EXERCER des actions mécaniques sur la poignée bras maître et système virtuel rencontrées par le système FT1.2.2 FT1.2.2 MAINTENIR virtuel Horizontale la platine support de poignée quels que soient FT1.3 FT1.3 ASSERVIR les efforts exercés t les actions mécaniques générées sur le bras- FT1.2.3 FT1.2.3 ne pas maître à celles rencontrées e TRANSMETTRE TRANSMETTRE par le système virtuel de moment à l’opérateur .n FT1.2.4 FT1.2.4 BALAYER Figure 2.1 un espace de travail adapté (les cases grisées correspondent aux fonctions aux capacités de l’opérateur s étudiées dans le sujet) r FT1.2.5 FT1.2.5 ASSURER l’équilibrage statique du bras dans toutes les positions u FT1.2.6 FT1.2.6 ASSURER o l’isotropie des actions mécaniques dans les trois c directions s FT1.2.7 FT1.2.7 ASSURER L’isotropie de masse apparente ressentie par u l’opérateur dans les trois directions Figure 2.2 to Caractérisation des fonctions techniques Fonctions Critères Niveaux Flexibilité FT1.2.5 Indépendance de l’action à exercer par l’opérateur sur la poignée totale néant vis à vis de la configuration du bras maître dans le champ de pesanteur. FT1.2.6 Au centre de l’espace de travail, les couples moteurs étant égaux, Niveau 1 : valeur minimale de 40 N - 10% r r r les efforts exercés sur la main de l’opérateur sont identiques dans dans les directions i , j et k , les 0 0 0 toutes les directions. couples moteurs étant tous égaux à leur valeur maximale ; Niveau 2 : à des couples moteurs tous +10% égaux à 1 Nm (sphère de rayon unité), correspond un ellipsoïde « en effort » dont le rapport grand axe sur petit axe est inférieur à 3. Fonction Critères Niveaux Flexibilité FT 2 Stabilité absolue néant Raideur Raideur R : R > 20Nm/rad. néant L’opérateur doit ressentir les arrêts de fin de course générés par le logiciel (« butées logicielles ») comme des butées « mécaniques » réelles (équivalentes à un contact réel entre solides). Bande passante motrice Fréquence de coupure à 3 dB néant Les vibrations parasites sur le bras maître doivent être filtrées. f3dB > 20 Hz Le système doit être rapide. Dossier « Annexes MP » Page 2 sur 6
- 3. C aractéristiques mécaniques du bras structure de ce bras maître. Il est principalement constitué (hormis le ANNEXE 3 (3 pages) La figure ci-contre présente la bâti 0) de la mise en série de cinq solides : o le socle 1 ; Bras 2 Figure 3.1 Avant-bras 3 o Le bras 2 ; o L’avant-bras 3 ; Platine 5 o La platine 5 ; t o La poignée de manœuvre 8. e Les quatre premiers solides forment avec le bâti, la chaîne ouverte des liaisons pivot L01, L12 et L23. .n La poignée 8, est reliée à la platine 5 par trois liaisons pivot en série dont les axes se Socle 1 coupent en O. s Bâti 0 Poignée 8 La platine 5 est maintenue horizontale par r une transmission à poulies et câbles. u SCHEMA CINEMATIQUE COMPLET i2 j123 c o Figure 3.2 C s q3 u g to i1 k01 q23 q2 B M2 D M3 M1 i1 i3 O A i1 q1 i0 i1 Dossier « Annexes MP » Page 3 sur 6
- 4. SCHEMA CINEMATIQUE PARTIEL (squelette) Figure 3.3 i2 Liaison Détail j123 0-1 r Pivot d’axe (B, k01 ) r k01 C 1-2 Pivot d’axe (B, j 123 ) q3 2-3 r Pivot d’axe (C, j 123 ) r 3-5 Pivot d’axe (D, j 123 ) g i1 j123 → r AB = L1 k 01 (L1 = 100 mm) B q23 → r q2 BC = L2 i 2 (L2 = 350 mm) t → r CD = L3 i 3 (L3 = 350 mm) r e → D DO = L5 i 1 (L5 = 170 mm) i1 .n A O s i3 i0 r q1 i1 i1 u i1 i3 i2 i3 i1 j1 j0 i2 q2 q3 q23 q1 k3 k3 o i1 k2 q2 q3 q23 q1 c k1 k2 k1 i0 j123 j123 j123 s k01 r r r r Notation : j 1 = j 2 = j 3 = j 123 q23 = q2 + q3 u DETAIL DU DISPOSITIF DE MAINTIEN DE LA PLATINE 5 EN POSITION HORIZONTALE to i2 i1 Figures 3.4 C k01 j123 i2 O C D B i1 i1 i3 i1 k01 Liaison Détail B r 1-2 Pivot d’axe (B, j 123 ) r D 2-4 Pivot d’axe (C, j 123 ) r 2-3 Pivot d’axe (C, j 123 ) r O 3-5 Pivot d’axe (D, j 123 ) i1 i1 i3 Dossier « Annexes MP » Page 4 sur 6
- 5. CHAINES D’ENERGIE DU BRAS MAITRE La chaîne d’énergie associé à chacune des trois liaisons pivot L01, L12 et L23 est constituée principalement d’un moteur électrique à courant continu et d’un réducteur à cabestan (voir figures 3.5 et 3.6). Position du bras maître Courant absorbé par Chaîne d’information le moteur Consigne de couple & Position angulaire de l’axe Axe du Bras maître Energie électrique Consigne de tension Chaîne d’énergie de l’axe du bras maître t ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE Amplificateur de Moteur à courant AGIR e Alimentation Réducteur à cabestan stabilisée puissance continu .n Figure 3.5 Axe soumis au retour d’effort r s Tambour et câble o u s c to u Poulie Moteur motrice électrique Figure 3.6-Réducteur à cabestan 3.6- CARACTERISTIQUES GEOMETRIQUES ET INERTIELES DES SOLIDES PRINCIPAUX SOLIDE 1 2 3 5 masse M1 M2 M3 M5 Désignation B G2 G3 G5 d’inertie Centre Position → r → r → r BG2 = L2 i 2 CG3 = L3 i 3 DG5 = L5 i 1 2 2 2 L2 = 350 mm L3 = 350 mm L5 = 170 mm Figure 3.7 Dossier « Annexes MP » Page 5 sur 6
- 6. E léments de la commande CHAINE D’INFORMATION DE L’AXE DU BRAS MAITRE Consigne de couple ACQUERIR Capteur de position Capteur de courant Contrôleur de liaison d’information Chaîne d’information TRAITER Carte d’axe ANNEXE 4 (1 page) COMMUNIQUER Contrôleur de liaison Carte d’axe Position du bras maître Courant absorbé par le moteur & Position angulaire de l’axe Axe du Bras maître Energie électrique Consigne de tension e t Chaîne d’énergie de l’axe du bras maître AGIR .n Figure 4.1 soumis Axe soumis au retour d’effort s MODELE CONTINU «BRAS MAITRE, INTERFACE DE COUPLAGE ET SYSTEME VIRTUEL » r Cop(p) u + G1(p) + o Q1(p) G2(p) c Bras maître s Cc(p) Cop(p) ∆Q(p) + H0 Qv(p) - u -(bm.p+km) + to - +(bv.p+kv) Hm(p) Interface de couplage Figure 4.3 Cv(p) Hv(p) système virtuel Qv(p) Figure 4.2 Fonctions de transfert FT & Grandeurs physiques en jeu (unités) bm Coefficient de frottement visqueux de la liaison système virtuel /maître (Nm/rad.s-1) km Coefficient de raideur de la liaison système virtuel /maître (Nm/rad) bv Coefficient de frottement visqueux de la liaison maître/ système virtuel (Nm/rad.s-1) kv Coefficient de raideur de la liaison maître/ système virtuel (Nm/rad) Cop(p) Couple résultant de l’action de l’opérateur ramené sur l’arbre moteur (Nm) Cc(p) Consigne de couple articulaire (Nm) Q1 (p) Position angulaire du socle 1 par rapport au bâti 0 (rad) Cv(p) Couple articulaire virtuel (Nm) Qv(p) Position articulaire virtuelle (rad) 4 18 1 18 1 Hv(p)= −3 −6 2 G1(p)= . −3 −6 2 G2(p)= . 1+ 3.10 .p + 2.10 .p p 1+ 1,8.10 .p + 1,2.10 .p p 1+ 4.10−4.p Notations : Pour une fonction scalaire f de la variable temporelle t, on note F sa transformée de Laplace, dont la variable complexe est notée p, ainsi u(t) a pour transformée U(p). Dossier « Annexes MP » Page 6 sur 6