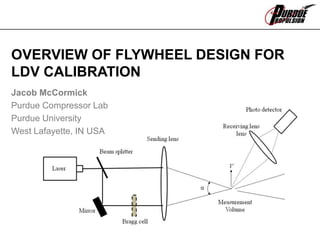
1. OVERVIEW OF FLYWHEEL DESIGN FOR
LDV CALIBRATION
Jacob McCormick
Purdue Compressor Lab
Purdue University
West Lafayette, IN USA
2. Motivation
17 June 2016 GT2016-56683 2
• Calibration of LDV gives us a lower measurement uncertainty
– This calibration originates from a primary source
• In this case the primary standard is the measurement of the flywheel’s
diameter and RPM of the motor, which can be traced to national
standards of length and time
– Calibration is costly when outsourced
• NIST Calibration: $2693
• In house calibration would mean upfront cost, but negligible
running costs for calibration
– We would be able to calibrate the LDV with our own primary standard
• Flywheel
3. Past Research
17 June 2016 GT2016-56683 3
• NIST (National Institute of Standards and Technology)
– Calibration Method: Spinning Wire
– Combined Uncertainty: 0.48%
– Max. Calibration Speed: 40 m/s
• ORNL (Oak Ridge National Labs)
– Calibration Method: Spinning Wire & Surface Irregularities
– Combined Uncertainty: At 10 m/s differed by 0.11 ± 0.26 % from NIST
– Max. Calibration Speed: 45 m/s
• NSWC (Naval Surface Warfare Center)
– Calibration Method: Sandpaper
– Combined Uncertainty: 0.10%
– Max. Calibration Speed: 18 m/s
5. Method 1: Specifications
• Diameter: 3”
• Weight: 0.22 lbs
• 6 guide grooves equidistantly spaced on rounded face of disk
• Triangular groove; 3 mm (0.118”) wide, 6 mm (0.236”) deep
– Catches light to isolate reflections from wire
• More material around shaft for improved stability
– Tentative height: 0.1”
5
6. Method 1: Calibration
• 6 tungsten wires, 5 um in diameter
• 6 pulses per revolution
– Improvement on NIST twice per revolution
– Shorter calibration times
• Mounted using glue adhesive initially
– If not successful, we will use clamping screws
10. Method 2: Detection Surface
• Surface irregularities provide the “particles” for detection
by the LDV
• Allows for a higher count rate
– Shortens calibration times
12. Methods Comparison
Spinning Wire Surface Irregularities
Less precision machining (One
surface vs three)
Higher count rates per revolution
No negative effect on uncertainty
from shaft wobble (distinguishable
events)
More control over motor speed for
given airspeed
No need to switch out broken wires