Real-time 3D Object Pose Estimation and Tracking for Natural Landmark Based V...
NASA_OSSI_NandaS_ShockleyL_Final
1. MISSION ENGINEERING AND SYSTEM ANALYSIS
Code 596 GN&C Components and Hardware Systems Branch
Presenters Siddhant Nanda Cornell University Liberty Shockley University of Cincinnati
Mentors Alvin Yew, Ph.D. Mechanical Engineering Sean Semper, Ph.D. Aerospace Engineering
ABSTRACT
Star trackers are used in spacecraft missions due to their higher
accuracy attitude measurements than most other sensors.
However, exorbitant costs and their closed proprietary nature
have drastically limited their potential for more exotic uses and
configurations, especially as a component in a spacecraft’s
attitude control system (ACS). This project investigates the use
of core algorithms that are applicable to two innovative
hardware prototypes currently under development.
(1) Astrometric Alignment Sensor
A unique stellar sensor that captures sky and spacecraft imagery
and quickly processes images to produce vectors in orbit.
(2) SSNano
A compact, novel star scanning method for a “lost in space,”
tumbling spacecraft that uses brightness transit signatures as
opposed to traditional images to calculate attitude.
The core algorithms selected were the Pyramid Star
Identification and the Singular Value Decomposition (SVD),
which are used in conjunction for attitude determination. For
the attitude determination, different methods were explored,
including the well-known TRIAD Algorithm, Markley’s Fast
Quaternion and SVD methods. Ultimately, the SVD method was
chosen and implemented, after considering the drastically
simpler implementation, low computational time and accuracy
of the results.
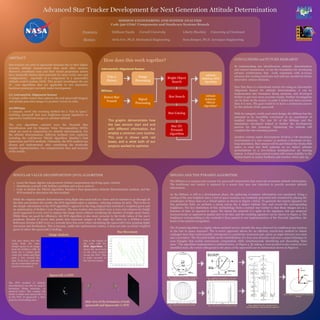
How does this work together?
SSNANO AND THE PYRAMID ALGORITHM
The SSNano is a compact star scanner for spacecraft instruments that need sub-arcminute attitude information.
The traditional star tracker is replaced by a sensor that uses star detection to provide accurate attitude
information.
As the SSNano is still in a development phase, the gathering of sensory information was simulated. Using a
catalog of the 200 brightest stars, a lost in space scenario was randomly generated and visualized by placing the
coordinates of these stars on a virtual sphere as shown in Figure 1 below. To generate the transit signature for
this particular field, we perform a sweep across the 0 degree latitude line, and record the corresponding
brightness. The key distinction of this methodology from a normal star tracker is that these images are as a
function of time as opposed to space. We detect the centroid of a spike in the signature, but use temporal
measurements as opposed to spatial ones to do this, and the resulting signature can be shown in Figure 4. The
brightness corresponding to the centroid is then passed to our implementation of the Pyramid algorithm, the
heart of star pattern recognition.
The Pyramid algorithm is a highly robust method used to identify the stars observed by traditional star trackers
in the lost in space scenario5. The k-vector approach allows for an efficient, search-less method to obtain
cataloged stars that could possibly correspond to a particular measured pair, given an angle between two stars
and a precision5. The Pyramid builds on the identification of a four-star structure and uses a smart technique to
scan triangles that avoids unnecessary computation while simultaneously identifying and discarding “false
stars.” The algorithm implemented is outlined below, in Figure 5. By taking a cross product to the vectors to two
identified stars, the vector orthogonal to the plane of the spacecraft can be determined shown in Figure 6.
Advanced Star Tracker Development for Next Generation Attitude Determination
CONCLUSIONS and FUTURE RESEARCH
By implementing star identification, attitude determination
and control simulations, we lay the foundation for developing
advance architectures that work seamlessly with in-house
advance star-tracking hardware and software needed for future
innovative science missions.
Now that there is a functional routine for using an Astrometric
Alignment Sensor for attitude determination, it can be
implemented into formation flying missions, and developed
further to get even more accurate results. Further investigation
can be done on the sensor, to make it faster and more accurate
than it is now. The goal would be to have a continuous answer
for the attitude of the spacecraft.
With its compact, credit-card sized design, the SSNano has the
potential to be incredibly convenient to an assortment of
smallsat missions. The star ID of the SSNano and the
simulations developed helped to further the development
process for this prototype. Optimizing the attitude will
complete the star scanning process.
Another venture under development involves a VR simulation
environment of a star scanner to perform a hardware-in-the-
loop simulation. Star sensors will be put behind the Oculus Rift
optics to read star field patterns as we induce attitude
perturbations to a low-friction hemispherical air bearing
system. A closed loop control system will restore stability to the
system based on sensor feedback and reaction wheel spin up.
SINGULAR VALUE DECOMPOSITION (SVD) ALGORITHM
o Learn the linear algebra and geometry behind computations involving space vehicles
o Familiarize yourself with Wahba’s problem and ways to solve it
o Code in Matlab the TRIAD algorithm, Markley’s Fast Quaternion Attitude Determination method, and the
SVD method to determine the best method
While the original attitude determination using flight data used took an 1 hour and 20 minutes to go through all
the data and produce the results, the SVD algorithm takes 11 minutes, reducing runtime by 90%. This is due to
the simple calculations of the SVD algorithm3, opposed to the long original that included a weighted guess and
an optimization of Wahba’s Loss Function4. The new routine also searched every 5 rows and columns for bright
spots (opposed to every one) to analyze the image faster without sacrificing the number of bright spots found.
While these are good for efficiency, the SVD algorithm is also more accurate to the truth values of the star’s
positions. Results of 19,101 data points that represent images of the night sky taken by a ICESat-2 Laser
Reference System (LRS) every 0.1 seconds have less error when calculating the spacecraft’s true pointing Right
Ascension and Declination. This is because, unlike the optimization routine, it does not take an initial weighted
guess of where the spacecraft is looking.
This plot shows how the
script finds the stars
(bright spots) in an image
from the ICESat-2 LRS. It
looks for a certain pixel
value (for white) and then
puts a box around the
spot. From here, each star
can be centroided and its
location determined.
This is the output of
the code with the
SVD algorithm. It
shows the movement
of the stars tracked
across the FOV. This
is quite accurate to
the real movement.
2
1 2
The SVD method of attitude
determination can also be used in
formation flying missions, as
pictured below. The routine will
check to make sure spacecraft 2 is
in the FOV of spacecraft 1, then
scan the surrounding stars.
Spacecraft 1’s FOV
Side view of the formation of both
spacecraft and Spacecraft 1’s FOV
Detect Star
Transit
Signal
Processing
Take a
Picture
Image
Processing
Star ID:
Pyramid
Algorithm
Star Catalog
Star Search
Bright Object
Search
Attitude
Solution: SVD
Algorithm
Attitude
Solution:
TRIAD
Algorithm*
Astrometric Alignment Sensor
SSNano
This graphic demonstrates how
the two sensors start and end
with different information, but
employ a common core routine.
This core is shown with red
boxes, and is what both of our
projects worked to optimize.
Image Analysis
Star Movement
⍵
vector
Star 1
Star 2
Fig. 1, adapted from Mackison et al (1973)
Notional Operation of a Star Scanner
Fig. 2, adapted from Mackison et al (1973)
Star Pulses Recorded From Instrument
Fig.5, adapted from M.A. Samaan (2003)
Star Identification with the Pyramid Approach
Fig. 3, Simulated Star Scanner Swaths Fig. 4, Star Pulses from Simulated Swath
Fig. 6, Attitude Determination using Cross
Product