Télécharger pour lire hors ligne



























![D'HVFULSWLRQ
HWSHGHODQJDJHUHSRVHVXUXQHUHSUpVHQWDWLRQJUDSKLTXHGHVFRQGLWLRQVTXL
DVVXUHQWO¶DFWLYDWLRQG¶XQHYDULDEOH/HODQJDJH/'HVWXQHVXFFHVVLRQGH©UpVHDX[
GHFRQWDFWVªYpKLFXODQWGHVLQIRUPDWLRQVORJLTXHVGHSXLVOHVHQWUpHVYHUVOHVVRUWLHV
¶HVWXQHVLPSOHWUDGXFWLRQGHVFLUFXLWVGHFRPPDQGHpOHFWULTXHVVHXOVOHVVPEROHV
FKDQJHQW
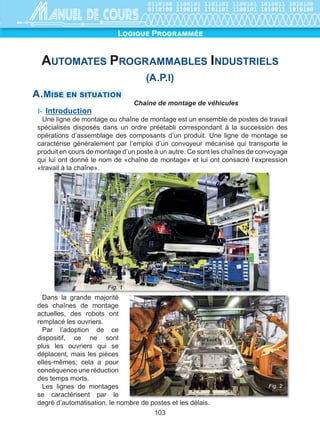
E3ULQFLSDX[VPEROHV
6PEROH 'pVLJQDWLRQ )RQFWLRQ
(TXLYDOHQW
pOHFWULTXH
RQWDFWjIHUPHWXUH
FRQWDFWSDVVDQWTXDQGLO
HVWDFWLRQQp
RQWDFWjRXYHUWXUH
FRQWDFWSDVVDQWTXDQGLO
Q¶HVWSDVDFWLRQQp
RQQH[LRQKRUL]RQWDOH
SHUPHWGHUHOLHUOHV
pOpPHQWVDFWLRQVpULH
RQQH[LRQYHUWLFDOH
SHUPHWGHUHOLHUOHV
pOpPHQWVDFWLRQHQ
SDUDOOqOH
%RELQHGLUHFWH
ODVRUWLHSUHQGODYDOHXU
GXUpVXOWDWORJLTXH](https://image.slidesharecdn.com/228451p03-211031190916/85/228451-p03-30-320.jpg)


![/ඏඑඝඍ3කඏකඉඕඕඍ
/HWDEOHDXVXLYDQWSUpVHQWHXQHOLVWHGHTXHOTXHVFRPPDQGHVGHFHODQJDJH
,QVWUXFWLRQVGHWHVW
,QVWUXFWLRQ )RQFWLRQ
/' /LUHXQHHQWUpHRXXQHYDULDEOHLQWHUQH
/'1 /LUHOHFRPSOpPHQWG¶XQHHQWUpHRXG¶XQHYDULDEOHLQWHUQH
$1'
(7ORJLTXHHQWUHOHUpVXOWDWGHO¶LQVWUXFWLRQSUpFpGHQWHHWO¶pWDWGH
O¶RSpUDQGH
$1'1
(7ORJLTXHHQWUHOHUpVXOWDWGHO¶LQVWUXFWLRQSUpFpGHQWHHWO¶pWDW
FRPSOpPHQWGHO¶RSpUDQGH
25
28ORJLTXHHQWUHOHUpVXOWDWGHO¶LQVWUXFWLRQSUpFpGHQWHHWO¶pWDWGH
O¶RSpUDQGH
251
28ORJLTXHHQWUHOHUpVXOWDWGHO¶LQVWUXFWLRQSUpFpGHQWHHWO¶pWDW
FRPSOpPHQWGHO¶RSpUDQGH
;25;251 28H[FOXVLIRwQFLGHQFH
,QVWUXFWLRQVG¶DFWLRQ
,QVWUXFWLRQ )RQFWLRQ
1 RPSOpPHQWGXUpVXOWDWGHO¶LQVWUXFWLRQSUpFpGHQWH
67 /¶RSpUDQGHDVVRFLpSUHQGODYDOHXUGXUpVXOWDWGHOD]RQHWHVW
671
/¶RSpUDQGHDVVRFLpSUHQGODYDOHXUFRPSOpPHQWGXUpVXOWDWGHOD
]RQHWHVW
6
/¶RSpUDQGHDVVRFLpHVWPLVjORUVTXHOHUpVXOWDWGHOD]RQHWHVW
HVWj
5
/¶RSpUDQGHDVVRFLpHVWPLVjORUVTXHOHUpVXOWDWGHOD]RQHWHVW
HVWj
NB: L’adresse ou le code opérande est précédé de %
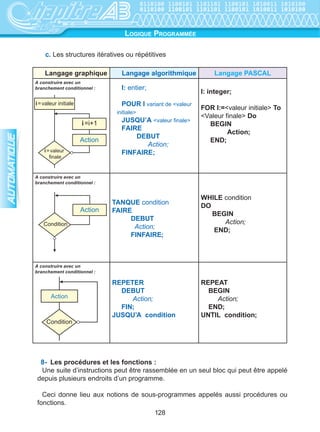
([HPSOH7UDGXFWLRQGXPrPHVFKpPDVWUXFWXUHOTXHFHOXLGHODSDJHSUpFpGHQWH
HQXQSURJUDPPHHQOLVWHG¶LQVWUXFWLRQ
PROGRAMME IL
24 V
S1
KM
S2
S3
Fig. 17
SCHÉMA STRUCTUREL
Avec les affectations suivantes :
KM :%Q2.0
S1 : %I1.0
S2 : %I1.1
S3 : %I1.2
On obtient le programme ci-dessous :
LD %I1.1
ANDN %I1.2
OR %I1.0
ST %Q2.0](https://image.slidesharecdn.com/228451p03-211031190916/85/228451-p03-33-320.jpg)

![D'HVFULSWLRQ
/H6)HVWXQODQJDJHJUDSKLTXH3DUDEXVGHODQJDJHRQO¶DSSHOOHDXVVLODQJDJH
*5$)(7
3RXUpGLWHUXQSURJUDPPH6)LOIDXWVXLYUHOHVpWDSHVVXLYDQWHV
# RQVWUXLUHJUDSKLTXHPHQWOH*5$)(7
# 7UDGXLUHOHVUpFHSWLYLWpVGDQVOHODQJDJH,/RX/'
# 7UDGXLUHOHVDFWLRQVGDQVOHODQJDJH,/RX/'
NB : dans ce type de langage, l’activation et la désactivation des étapes se fait
automatiquement.
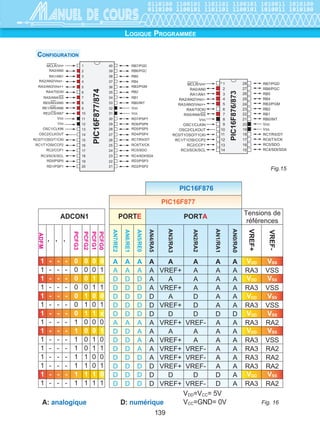
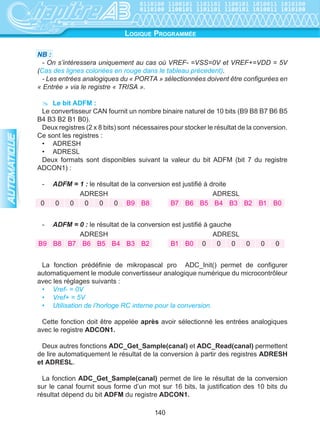
,9([HPSOHGHEUDQFKHPHQW76;GHFKH]7pOpPpFDQLTXH
3UpVHQWDWLRQ
kEODJHGHVHQWUpHVVRUWLHV
AUTOMATE TSX 17-20
0v
24v I0,0 I0,1 I0,2 I0,3 I0,4 I0,5 I0,6 I0,7 I0,8 I0,10
I0,9 I0,11 I0,12 I0,13 I0,14 I0,15 I0,16 I0,17 I0,18 I0,19 I0,21
I0,20
N L
C0 O0,0 C1 O0,1 C2 O0,2 C3 O0,3 C4
-
7 O0,4 O0,5 O0,7
O0,6 C8
-
11 O0,8 O0,9 O0,11
O0,10 I0,24 I0,25
Alimentation
A.P.I
Alimentation
Capteurs
ENTRÉES
A.P.I
SORTIES
A.P.I
230 V ~ Fig. 18
TSX 17-20
S2
S1
AU
Q1
S3
Q5
L
F2
24 V
N
KM1
A1
A2 KM3
A1
A2 KM4
A1
A2 H
F1
Fig. 19](https://image.slidesharecdn.com/228451p03-211031190916/85/228451-p03-35-320.jpg)














Le document traite des exercices sur la logique séquentielle et des méthodes de contrôle liées aux processus de fabrication, en mettant l'accent sur des systèmes automatisés tels que les chaînes de montage. Il aborde également les interactions entre les actionneurs et les capteurs au sein de l'interface de commande. En raison de la diversité des équipements, le contenu doit être adapté au matériel disponible dans chaque laboratoire.









































