Télécharger pour lire hors ligne

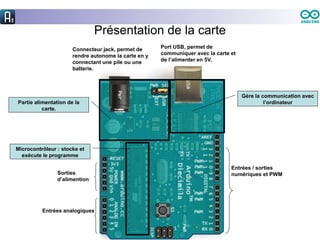
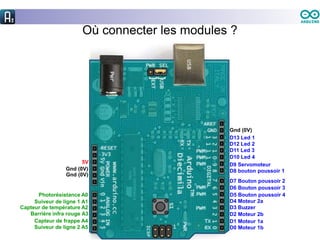
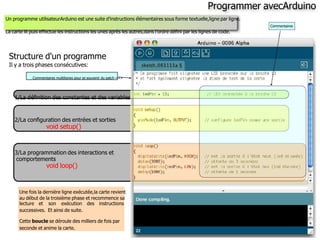
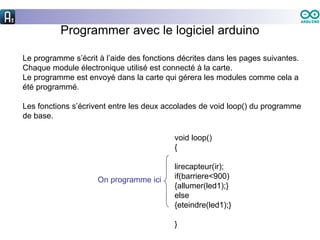
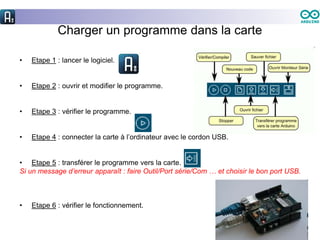





Le document présente l'Arduino comme une carte programmable permettant de contrôler divers capteurs et actionneurs pour créer des systèmes automatisés. Il décrit les composants matériels et les étapes de programmation nécessaires pour effectuer des tâches spécifiques, ainsi que les fonctions d'entrée/sortie et les interactions avec les modules connectés. Une multitude de exemples de code illustrent l'utilisation d'Arduino pour diverses applications, y compris les moteurs, les capteurs, et les LED.