Téléchargé 112 fois

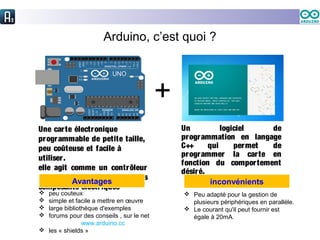

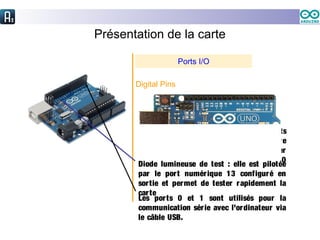
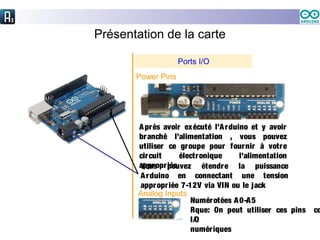

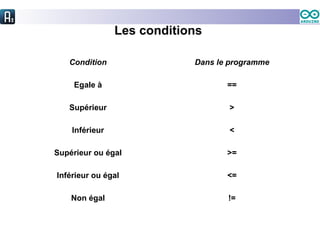
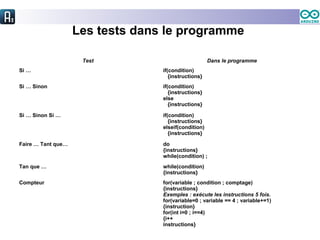
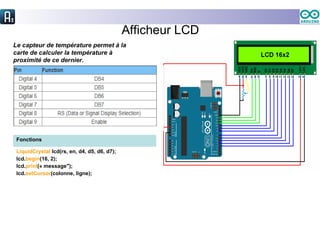
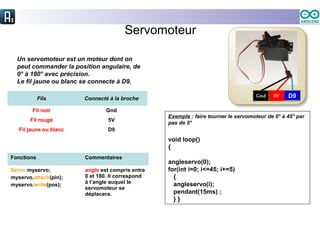


Le document présente une formation sur l'utilisation de la carte Arduino, expliquant ses composants, avantages et inconvénients. Il détaille également la programmation en C++ via le logiciel Arduino, avec des exemples pratiques d'utilisation de divers capteurs et actionneurs. Des instructions de câblage et des ressources supplémentaires sont également fournies.





![diaporama presentation arduino [Mode de compatibilité].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/diaporamapresentationarduinomodedecompatibilit-221127093339-7f2597f7-thumbnail.jpg?width=640&height=640&fit=bounds)








































