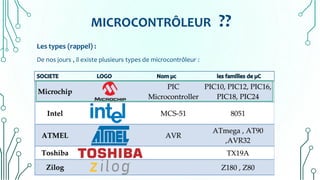
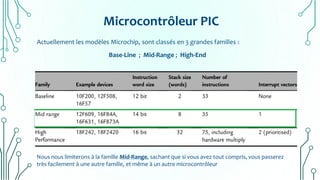
Ce document traite des microcontrôleurs PIC, en se concentrant sur les modèles 16F84A et 16F877, leurs caractéristiques, avantages et types. Il décrit également la programmation des microcontrôleurs, l'utilisation de registres spéciaux, et les différents composants tels que les timers et les mécanismes de veille. Enfin, il met l'accent sur l'importance de la programmation en langage C pour tirer parti des capacités des microcontrôleurs.