Téléchargé 112 fois




























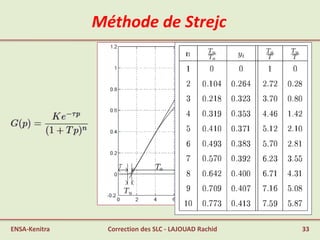
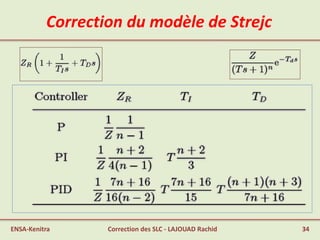

Le document aborde les types de correcteurs utilisés dans les systèmes asservis, tels que les correcteurs proportionnels, intégrals et dérivés, ainsi que les méthodes de réglage associées. Il décrit les effets de chaque type de correcteur sur la stabilité, la précision et la rapidité du système, tout en proposant des techniques de synthèse pour optimiser leur performance. Enfin, diverses méthodes empiriques pour le réglage des correcteurs sont évoquées afin d'assurer une réponse adéquate du système.













![Cours mooremealy [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/coursmooremealyautosaved-170802082038-thumbnail.jpg?width=640&height=640&fit=bounds)




























































