Téléchargé 27 fois
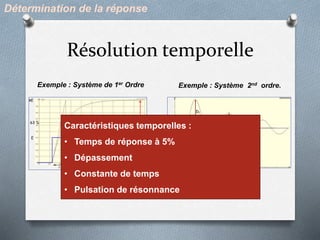
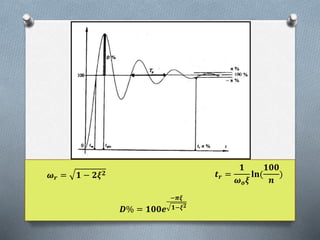
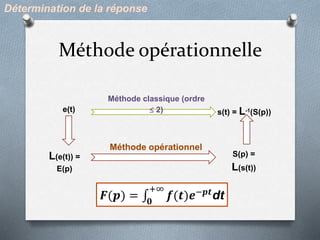
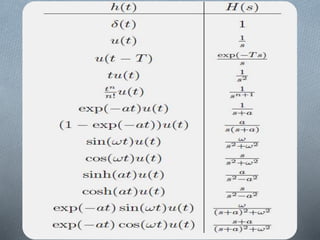

Le document traite des asservissements linéaires continus, couvrant des notions de signal, modélisation, et analyse de systèmes dynamiques. Il aborde également des méthodes de représentation graphique, la stabilité des systèmes asservis et les performances des correcteurs. Enfin, des critères mathématiques et des méthodes opérationnelles pour la détermination de la réponse des systèmes sont présentés.





















































































