Automatique
Etude de SystèmesLinéaires Continus Invariants (SLCI)
Mouhamadou Falilou NDIAYE
ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR
7 novembre 2022
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 1 / 70
2.
CONTENU
1 Objectifs
2 Systèmeet commande
3 Laplace
4 Signaux
5 Système asservi
6 Stabilité
7 Condition sur la fonction de transfert
8 Robustesse de la stabilité
9 Correcteur
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 2 / 70
3.
Objectifs
Comprendre le conceptde système commandé
Savoir évaluer les performances d’un système : stabilité, rapidité, précision
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 3 / 70
4.
Notions de basesur les systèmes
Etude de systèmes Linéaires Continus Invariants
Analyse de systèmes asservis linéaires Continus
Correction des systèmes asservis linéaires Continus
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 4 / 70
5.
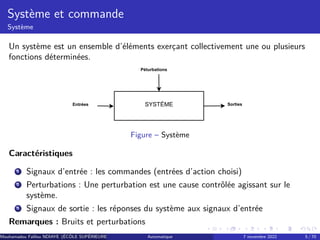
Système et commande
Système
Unsystème est un ensemble d’éléments exerçant collectivement une ou plusieurs
fonctions déterminées.
SYSTÉME
Péturbations
Sorties
Entrées
Figure – Système
Caractéristiques
1 Signaux d’entrée : les commandes (entrées d’action choisi)
2 Perturbations : Une perturbation est une cause contrôlée agissant sur le
système.
3 Signaux de sortie : les réponses du système aux signaux d’entrée
Remarques : Bruits et perturbations
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 5 / 70
6.
Système et commande
Systèmelinéaire continu invariant
Définition : Un système linéaire continu invariant (SLCI) est un système qui
satisfait au principe de superposition, et dont les caractéristiques ne varient pas au
cours du temps.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 6 / 70
7.
Système et commande
Commande
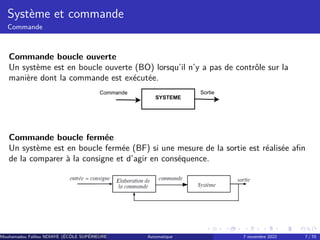
Commandeboucle ouverte
Un système est en boucle ouverte (BO) lorsqu’il n’y a pas de contrôle sur la
manière dont la commande est exécutée.
SYSTEME
Commande Sortie
Commande boucle fermée
Un système est en boucle fermée (BF) si une mesure de la sortie est réalisée afin
de la comparer à la consigne et d’agir en conséquence.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 7 / 70
8.
Système et commande
Modélisation
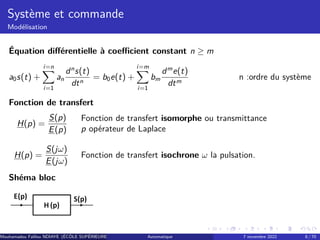
Équationdifférentielle à coefficient constant n ≥ m
a0s(t) +
i=n
X
i=1
an
dn
s(t)
dtn
= b0e(t) +
i=m
X
i=1
bm
dm
e(t)
dtm
n :ordre du système
Fonction de transfert
H(p) =
S(p)
E(p)
Fonction de transfert isomorphe ou transmittance
p opérateur de Laplace
H(p) =
S(jω)
E(jω)
Fonction de transfert isochrone ω la pulsation.
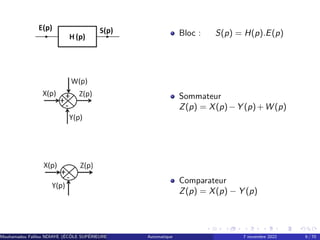
Shéma bloc
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 8 / 70
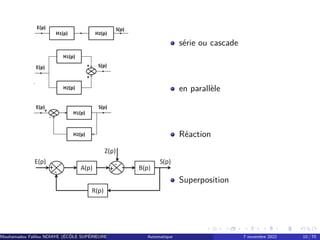
série ou cascade
enparallèle
Réaction
Superposition
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 10 / 70
11.
Transformé de Laplace
Définition
Soitf(t) un signal causal (c-a-d f(t) = 0 pour t < 0).
Sa transformée de Laplace est définie par :
F(p) =
Z ∞
0
f (t) · e−pt
dt
p est une variable complexe
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 11 / 70
12.
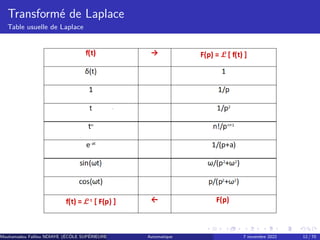
Transformé de Laplace
Tableusuelle de Laplace
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 12 / 70
13.
Propriétés fondamentales
Linéarité
L [af(t) + bg(t)] = aF(p) + bG(p)
Dérivée
L
df (t)
dt
= pF(p) − f (0)
Intégral
L
hR t
0
f (t)dt
i
=
F(p)
p
Retard temporel
L [f (t − τ) = e−τp
F(p)]
Translation de la transformée
L [e−σt
f (t) = F(p + σ)]
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 13 / 70
14.
Propriétés fondamentales
Suite
Convolution
L [f(t) ∗ g(t)] = F(p) · G(p)
Théorème de la valeur initiale
lim
p→∞
pF(p) = lim
t→0+
f (t)
Théorème de la valeur finale
lim
p→0
pF(p) = lim
t→∞
f (t)
Périodification
L
k=∞
X
k=0
f (t − kT) · ε(t − kT) =
F(p)
1 − epT
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 14 / 70
15.
Transformée inverse
La transforméede Laplace inverse unilatérale f(t) d’une fonction F(p) est définie
par :
f (t) = L−1
[F(p)]
=
1
2πj
Z ∞
−∞
F(p) · e−p
dp
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 15 / 70
16.
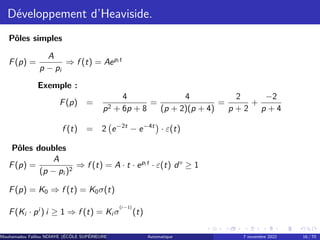
Développement d’Heaviside.
Pôles simples
F(p)=
A
p − pi
⇒ f (t) = Aepi t
Exemple :
F(p) =
4
p2 + 6p + 8
=
4
(p + 2)(p + 4)
=
2
p + 2
+
−2
p + 4
f (t) = 2 e−2t
− e−4t
· ε(t)
Pôles doubles
F(p) =
A
(p − pi )2
⇒ f (t) = A · t · epi t
· ε(t) d° ≥ 1
F(p) = K0 ⇒ f (t) = K0σ(t)
F(Ki · pi
) i ≥ 1 ⇒ f (t) = Ki σ
(i−1)
(t)
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 16 / 70
17.
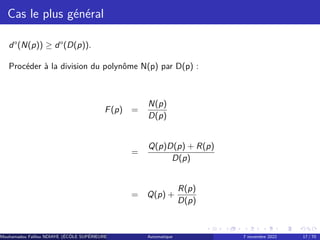
Cas le plusgénéral
d°(N(p)) ≥ d°(D(p)).
Procéder à la division du polynôme N(p) par D(p) :
F(p) =
N(p)
D(p)
=
Q(p)D(p) + R(p)
D(p)
= Q(p) +
R(p)
D(p)
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 17 / 70
18.
Exercice I
Résoudre sie(t) = 6 avec s
′
(0) = 1 et s(0) = 2
d2
s(t)
dt2
+ 5 ×
ds(t)
dt
+ 6 × s(t) = e(t) (1)
Exercice II
Donner la transformée inverse
3 × (p + 1)
p × (1 + 0, 3 × p)2 × (1 + 0, 1 × p)
(2)
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 18 / 70
19.
Signaux
Signaux de commandeusuel
1 Impulsion de Dirac
2 Echelon
3 Rampe
4 Sinusoïdale
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 19 / 70
20.
Signaux
Analyse temporelle
Étude ducomportement en fonction du temps.
1 Réponse impulsionnelle : réponse à une impulsion de Dirac.
2 Réponse indicielle : réponse à un échelon.
3 Rampe
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 20 / 70
21.
Signaux
Analyse harmonique
C’est l’étudedu comportement d’un système pour une excitation sinusoïdale de
fréquence variable.
1 Diagramme de Bode : C’est la réponse fréquentielle. Il est représenter par
deux courbe :
le gain G (ou amplitude) en décibels (dB). G = −20log|H(p)|
la phase φ = argH(p) en degré.
2 Diagramme de Black. C’est la courbe G(dB) = g(φ) paramétré par ω
3 Diagramme de Nyquist. C’est la courbe Im|H(jω)| = f (Re|H(jω)|) paramétré
par ω
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 21 / 70
22.
Système asservi
Structure
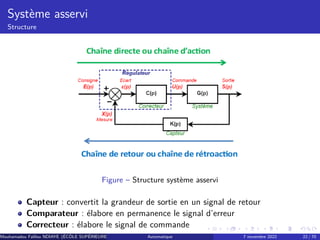
Figure –Structure système asservi
Capteur : convertit la grandeur de sortie en un signal de retour
Comparateur : élabore en permanence le signal d’erreur
Correcteur : élabore le signal de commande
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 22 / 70
23.
Système asservi
Structure
Régulateur analogique: Le signal de sortie est analogique.
Système asservi linéaire continu.
Régulateur numérique : Le signal de sortie est numérique.
Système asservi linéaire échantillonné.
Régulateur TOR(tout ou rien).
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 23 / 70
24.
Système asservi
Types d’asservissement
Danstout système asservi, la grandeur de sortie doit recopier le mieux possible la
grandeur d’entrée quelles que soient les perturbations.
Système suiveur : L’entrée de référence évolue.
Régulation L’entrée de référence est constante. Cette entrée est appelée
consigne.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 24 / 70
25.
Objectifs
Comprendre le conceptde système commandé
Savoir évaluer les performances d’un système : stabilité, rapidité, précision
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 25 / 70
26.
Généralités
Forme canonique d’uneFT
H(p) =
K
pα
1 + b1 · p + · · · + bm · p
1 + a1 · p + · · · + am · p
Gain statique : Ks = lim
p→0
H(p)
Classe du système : α
zéros du système Valeurs de p qui annulent le numérateur
Pôles du système Valeurs de p qui annulent le dénominateur
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 26 / 70
27.
Généralités
Fonctions de transfertsparticulières
Intégrateur H(p) =
1
p
Dérivateur H(p) = p
Retard H(p) = e−pθ
La signal d’entrée de l’instant est reproduit en sortie à l’instant t + θ
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 27 / 70
28.
Temps de réponseà 5% : temps au bout duquel s(t) atteint s(∞) ± 5%
Temps de montée : temps au bout duquel s(t) passe de 10% de sa valeur finale
à 90% de celle-ci.
Pulsation de cassure : pulsation de rencontre de deux asymptotes.
Pulsation de coupure : pulsation pour laquelle le gain a diminué de 3 dB par
rapport à sa valeur maximale.
Bande passante : intervalle de pulsations pour lequel le gain ne diminue pas de
plus de 3 dB par rapport à sa valeur maximale.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 28 / 70
29.
Système du 1erordre
Description
Systèmes régis par une fonction de transfert
H(p) =
K
1 + τ · p
H(jω) =
K
1 + j
ω
ωn
avec ωn =
1
τ
τ : Constante de temps
ωn : pulsation propre
K : gain statique
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 29 / 70
30.
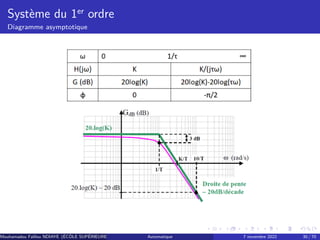
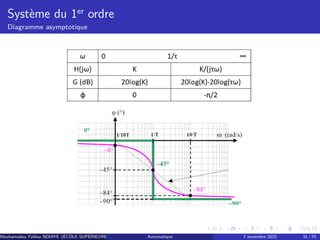
Système du 1erordre
Diagramme asymptotique
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 30 / 70
31.
Système du 1erordre
Diagramme asymptotique
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 31 / 70
32.
Système du 1erordre
Réponse indicielle
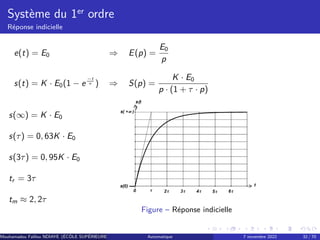
e(t) = E0 ⇒ E(p) =
E0
p
s(t) = K · E0(1 − e
−t
τ ) ⇒ S(p) =
K · E0
p · (1 + τ · p)
s(∞) = K · E0
s(τ) = 0, 63K · E0
s(3τ) = 0, 95K · E0
tr = 3τ
tm ≈ 2, 2τ
Figure – Réponse indicielle
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 32 / 70
33.
Système du 2ndordre
Réponse indicielle
H(p) =
K
1 +
2z
ωn
· p +
1
ω2
n
· p2
K : gain statique
z : coefficient d’amortissement 0
ωn : pulsation propre non amortie
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 33 / 70
34.
Système du 2ndordre
Réponse indicielle
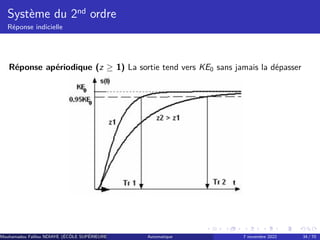
Réponse apériodique (z ≥ 1) La sortie tend vers KE0 sans jamais la dépasser
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 34 / 70
35.
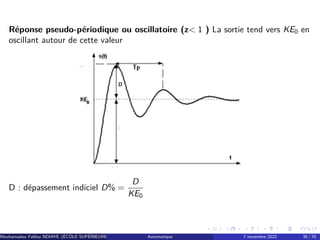
Réponse pseudo-périodique ouoscillatoire (z 1 ) La sortie tend vers KE0 en
oscillant autour de cette valeur
D : dépassement indiciel D% =
D
KE0
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 35 / 70
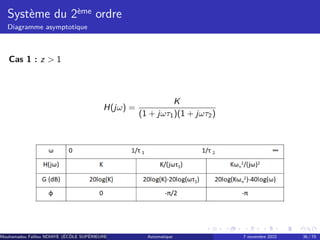
36.
Système du 2èmeordre
Diagramme asymptotique
Cas 1 : z 1
H(jω) =
K
(1 + jωτ1)(1 + jωτ2)
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 36 / 70
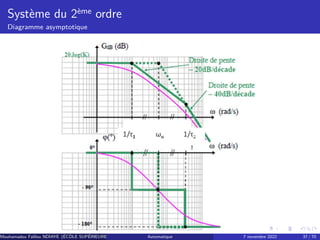
37.
Système du 2èmeordre
Diagramme asymptotique
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 37 / 70
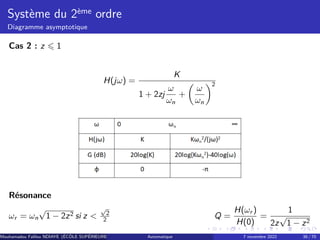
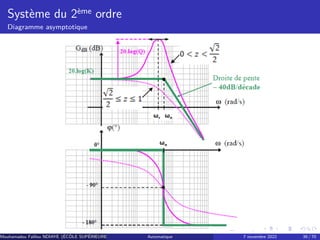
38.
Système du 2èmeordre
Diagramme asymptotique
Cas 2 : z ⩽ 1
H(jω) =
K
1 + 2zj
ω
ωn
+
ω
ωn
2
Résonance
ωr = ωn
√
1 − 2z2 si z
√
2
2 Q =
H(ωr )
H(0)
=
1
2z
√
1 − z2
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 38 / 70
39.
Système du 2èmeordre
Diagramme asymptotique
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 39 / 70
40.
Stabilité
La stabilité estune condition obligatoire pour un système asservi.
Définition :
Un système est stable si et seulement si à tout signal borné en entrée, correspond
un signal borné en sortie.
Proposition :
Un système linéaire est stable lorsque sa réponse à
un échelon prend une valeur finie en régime permanent
une impulsion tend vers 0,
à une sinusoïde est une sinusoïde d’ amplitude finie
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 40 / 70
41.
Condition sur lafonction de transfert
Condition sur la fonction de transfert :
Un système linéaire est stable si et seulement si les pôles de sa fonction de
transfert sont à parties réelles strictement négatives.
Un système dont la fonction de transfert en boucle ouverte est H(p) sera stable
en boucle fermée si les racines de l’équation 1 + H(p) sont toutes à parties réelles
négatives.
Remarque :
Un système peut être stable en BO et instable en BF
Un système peut être instable en BO et stable en BF
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 41 / 70
42.
Critères de stabilité
Critèrede Routh
Évaluation de la stabilité en régime sinusoïdal
Critère du revers dans le plan de Black
Critère du revers dans le plan de Nyquis
Règle du revers dans le plan de Bode
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 42 / 70
43.
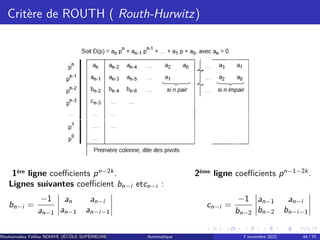
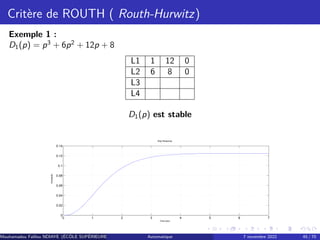
Critère de ROUTH( Routh-Hurwitz)
Un système est stable en BF si et seulement si
Tous les coefficients de la 1ère colonne du tableau de
Routh calculé à partir du dénominateur.
Conditions nécessaires de stabilité
1
Les coefficient ai sont de même signe
2
Pas de degré manquant
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 43 / 70
44.
Critère de ROUTH( Routh-Hurwitz)
1ère ligne coefficients pn−2k
. 2ème ligne coefficients pn−1−2k
.
Lignes suivantes coefficient bn−i etcn−i :
bn−i =
−1
an−1
an an−i
an−1 an−i−1
cn−i =
−1
bn−2
an−1 an−i
bn−2 bn−i−1
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 44 / 70
Critère de ROUTH( Routh-Hurwitz)
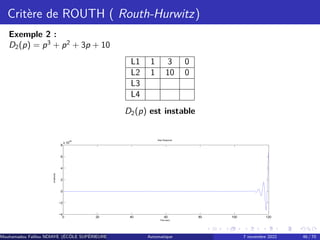
Exemple 2 :
D2(p) = p3
+ p2
+ 3p + 10
L1 1 3 0
L2 1 10 0
L3
L4
D2(p) est instable
0 20 40 60 80 100 120
−4
−2
0
2
4
6
8
x 10
24 Step Response
Time (sec)
Amplitude
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 46 / 70
47.
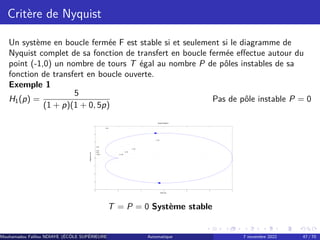
Critère de Nyquist
Unsystème en boucle fermée F est stable si et seulement si le diagramme de
Nyquist complet de sa fonction de transfert en boucle fermée effectue autour du
point (-1,0) un nombre de tours T égal au nombre P de pôles instables de sa
fonction de transfert en boucle ouverte.
Exemple 1
H1(p) =
5
(1 + p)(1 + 0, 5p)
Pas de pôle instable P = 0
−1 0 1 2 3 4 5
−4
−3
−2
−1
0
1
2
3
4
0 dB
−10 dB
−6 dB
−4 dB
−2 dB
10 dB
6 dB
4 dB
2 dB
Nyquist Diagram
Real Axis
Imaginary
Axis
T = P = 0 Système stable
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 47 / 70
48.
Critère de Nyquist
Exemple2 :
H2(p) =
20
(p − 1)(p2 + 5p + 25)
−1 −0.9 −0.8 −0.7 −0.6 −0.5 −0.4 −0.3 −0.2 −0.1 0
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0 dB
−20 dB
−10 dB
−6 dB
−4 dB
−2 dB
20 dB
10 dB
6 dB 4 dB 2 dB
Nyquist Diagram
Real Axis
Imaginary
Axis
P = 1 T = 0
Système instable en boucle fermée
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 48 / 70
49.
Critère du revers
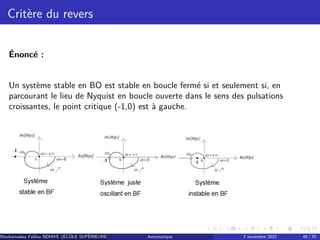
Énoncé:
Un système stable en BO est stable en boucle fermé si et seulement si, en
parcourant le lieu de Nyquist en boucle ouverte dans le sens des pulsations
croissantes, le point critique (-1,0) est à gauche.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 49 / 70
50.
Marges de stabilité
Lesmarges de stabilité permettent d’estimer la proximité du point critique.
Plus les marges sont grandes, plus robuste est la stabilité
Pour une bonne stabilité, on considère satisfaisant les valeurs minimales suivantes :
Mφ = 45° MG = 10dB
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 50 / 70
51.
Robustesse de lastabilité
Détermination algébrique
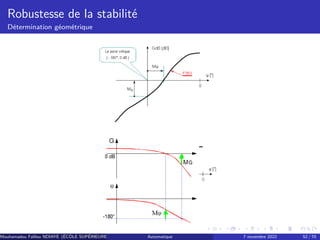
Marge de phase :
Soit ωc0 la pulsation telle que |HBO(jωc0)| = 1
La marge de phase du système est :
Mφ =
180° + φc
π + φc
avec φc = arg [HBO(jωc0)]
Marge de gain :
Soit ωπ la pulsation telle que arg[HBO(jωpi )] = −π
La marge de gain du système est : Mg = −20log|HBO(jωpi |
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 51 / 70
52.
Robustesse de lastabilité
Détermination géométrique
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 52 / 70
53.
Notion de correction
Rôle
Exigences: Stabilité, précision, rapidité, sensibilité aux perturbations
Correction : Comportement fixé par un cahier des charges.
Remarque : Correction série.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 53 / 70
54.
Notion de correction
Typesd’action
Action proportionnelle :
Signal de commande proportionnel à l’erreur.
u(t) = K · ε(t)
Action intégrale :
Signal de commande proportionnel à l’intégrale de l’erreur.
u(t) =
1
Ti
R
ε(t)dt
Action dérivée :
Signal de commande proportionnel à la dérivée de l’erreur.
u(t) = Td
dε(t)
dt
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 54 / 70
55.
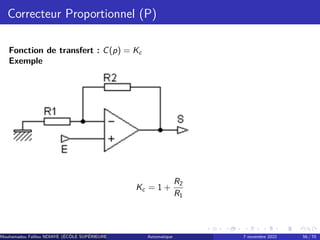
Correcteurs usuels
Type deCorrecteur :
Proportionnel (P.) :
C(p) = Kc
Proportionnel Intégral (P.I.) :
C(p) = Kc +
Kc
Ti · p
= Kc
1 + Ti · p
Ti · p
Proportionnel Déridé (P.D.) :
C(p) = Kc (1 + Td · p)
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 55 / 70
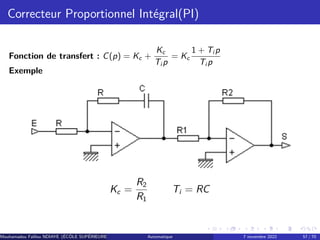
Correcteur Proportionnel Intégral(PI)
Fonctionde transfert : C(p) = Kc +
Kc
Ti p
= Kc
1 + Ti p
Ti p
Exemple
Kc =
R2
R1
Ti = RC
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 57 / 70
58.
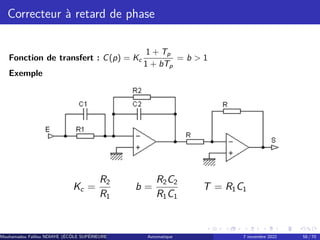
Correcteur à retardde phase
Fonction de transfert : C(p) = Kc
1 + Tp
1 + bTp
= b 1
Exemple
Kc =
R2
R1
b =
R2C2
R1C1
T = R1C1
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 58 / 70
59.
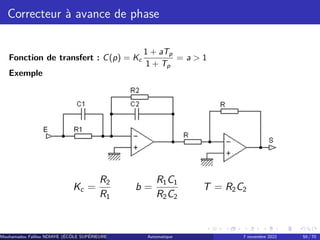
Correcteur à avancede phase
Fonction de transfert : C(p) = Kc
1 + aTp
1 + Tp
= a 1
Exemple
Kc =
R2
R1
b =
R1C1
R2C2
T = R2C2
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 59 / 70
60.
Correcteur Proportionnel IntégralDérivé(PID)
Fonction de transfert :
C(p) = Kc
1 +
1
Ti p
+ Td p
= K1 +
K2
p
+ K3p
Exemple
K1 =
R2
R1
+
C1
C2
K2 =
1
R1C2
K3 = R2C1
C(p) = Kc
1 +
1
Ti p
+
Td p
1 + τp
= K1 +
K2
p
+
K3p
1 + τp
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 60 / 70
61.
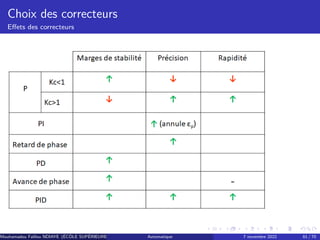
Choix des correcteurs
Effetsdes correcteurs
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 61 / 70
62.
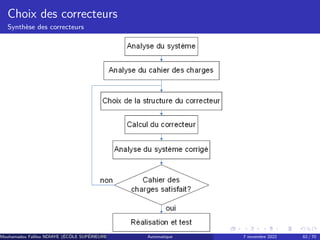
Choix des correcteurs
Synthèsedes correcteurs
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 62 / 70
63.
Choix des correcteurs
Synthèsedes correcteurs
Correcteur P :
1 Exprimer le critère de performance ciblé du système en fonction de Kc .
2 Calculer Kc afin de respecter les exigences du cahier des charges.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 63 / 70
64.
Choix des correcteurs
Synthèsedes correcteurs
Correcteur PI
1 Méthode de compensation
Fixer Ti pour éliminer le pôle dominant de la FT en BO.
Exprimer le critère de performance ciblé du système en fonction de Kc.
Déterminer Kc afin de respecter les exigences du cahier des charges.
2 Méthode de placement (si Mφ pas importante)
Choisir Ti = 10/ωc0
Exprimer le critère de performance ciblé du système en fonction de Kc.
Déterminer Kc afin de respecter les exigences du cahier des charges.
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 64 / 70
65.
Choix des correcteurs
Synthèsedes correcteurs
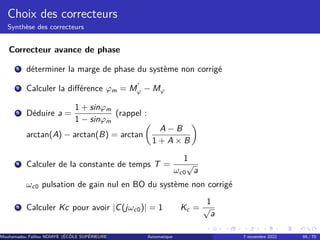
Correcteur avance de phase
1 déterminer la marge de phase du système non corrigé
2 Calculer la différence φm = M
′
φ − Mφ
3 Déduire a =
1 + sinφm
1 − sinφm
(rappel :
arctan(A) − arctan(B) = arctan
A − B
1 + A × B
4 Calculer de la constante de temps T =
1
ωc0
√
a
ωc0 pulsation de gain nul en BO du système non corrigé
5 Calculer Kc pour avoir |C(jωc0)| = 1 Kc =
1
√
a
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 65 / 70
66.
Choix des correcteurs
Synthèsedes correcteurs
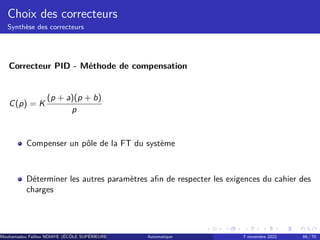
Correcteur PID - Méthode de compensation
C(p) = K
(p + a)(p + b)
p
Compenser un pôle de la FT du système
Déterminer les autres paramètres afin de respecter les exigences du cahier des
charges
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 66 / 70
67.
Choix des correcteurs
Synthèsedes correcteurs
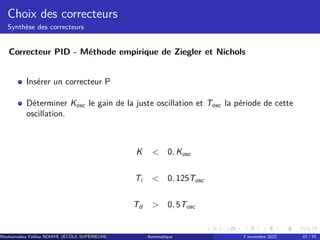
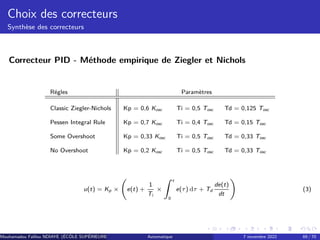
Correcteur PID - Méthode empirique de Ziegler et Nichols
Insérer un correcteur P
Déterminer Kosc le gain de la juste oscillation et Tosc la période de cette
oscillation.
K 0, Kosc
Ti 0, 125Tosc
Td 0, 5Tosc
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 67 / 70
68.
Choix des correcteurs
Synthèsedes correcteurs
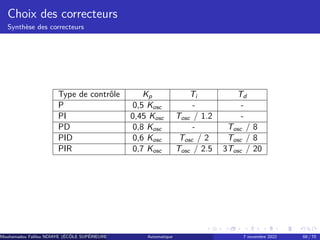
Type de contrôle Kp Ti Td
P 0,5 Kosc - -
PI 0,45 Kosc Tosc / 1.2 -
PD 0,8 Kosc - Tosc / 8
PID 0,6 Kosc Tosc / 2 Tosc / 8
PIR 0,7 Kosc Tosc / 2.5 3Tosc / 20
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 68 / 70
69.
Choix des correcteurs
Synthèsedes correcteurs
Correcteur PID - Méthode empirique de Ziegler et Nichols
Régles Paramètres
Classic Ziegler-Nichols Kp = 0,6 Kosc Ti = 0,5 Tosc Td = 0,125 Tosc
Pessen Integral Rule Kp = 0,7 Kosc Ti = 0,4 Tosc Td = 0,15 Tosc
Some Overshoot Kp = 0,33 Kosc Ti = 0,5 Tosc Td = 0,33 Tosc
No Overshoot Kp = 0,2 Kosc Ti = 0,5 Tosc Td = 0,33 Tosc
u(t) = Kp ×
e(t) +
1
Ti
×
Z t
0
e(τ) dτ + Td
de(t)
dt
(3)
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 69 / 70
70.
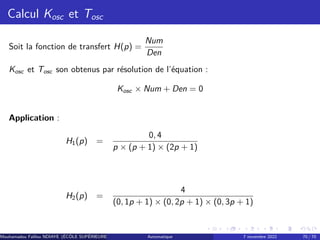
Calcul Kosc etTosc
Soit la fonction de transfert H(p) =
Num
Den
Kosc et Tosc son obtenus par résolution de l’équation :
Kosc × Num + Den = 0
Application :
H1(p) =
0, 4
p × (p + 1) × (2p + 1)
H2(p) =
4
(0, 1p + 1) × (0, 2p + 1) × (0, 3p + 1)
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 70 / 70
![Propriétés fondamentales
Linéarité
L [af (t) + bg(t)] = aF(p) + bG(p)
Dérivée
L
df (t)
dt
= pF(p) − f (0)
Intégral
L
hR t
0
f (t)dt
i
=
F(p)
p
Retard temporel
L [f (t − τ) = e−τp
F(p)]
Translation de la transformée
L [e−σt
f (t) = F(p + σ)]
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 13 / 70](https://image.slidesharecdn.com/coursautomatique2022-250721010132-9301f85e/85/cours_automatique_2022_systeme_asservis-pdf-13-320.jpg)
![Propriétés fondamentales
Suite
Convolution
L [f (t) ∗ g(t)] = F(p) · G(p)
Théorème de la valeur initiale
lim
p→∞
pF(p) = lim
t→0+
f (t)
Théorème de la valeur finale
lim
p→0
pF(p) = lim
t→∞
f (t)
Périodification
L
k=∞
X
k=0
f (t − kT) · ε(t − kT) =
F(p)
1 − epT
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 14 / 70](https://image.slidesharecdn.com/coursautomatique2022-250721010132-9301f85e/85/cours_automatique_2022_systeme_asservis-pdf-14-320.jpg)
![Transformée inverse
La transformée de Laplace inverse unilatérale f(t) d’une fonction F(p) est définie
par :
f (t) = L−1
[F(p)]
=
1
2πj
Z ∞
−∞
F(p) · e−p
dp
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 15 / 70](https://image.slidesharecdn.com/coursautomatique2022-250721010132-9301f85e/85/cours_automatique_2022_systeme_asservis-pdf-15-320.jpg)



![Robustesse de la stabilité
Détermination algébrique
Marge de phase :
Soit ωc0 la pulsation telle que |HBO(jωc0)| = 1
La marge de phase du système est :
Mφ =
180° + φc
π + φc
avec φc = arg [HBO(jωc0)]
Marge de gain :
Soit ωπ la pulsation telle que arg[HBO(jωpi )] = −π
La marge de gain du système est : Mg = −20log|HBO(jωpi |
Mouhamadou Falilou NDIAYE (ÉCÔLE SUPÉRIEURE POLYTECHNIQUE DE DAKAR)
Automatique 7 novembre 2022 51 / 70](https://image.slidesharecdn.com/coursautomatique2022-250721010132-9301f85e/85/cours_automatique_2022_systeme_asservis-pdf-51-320.jpg)