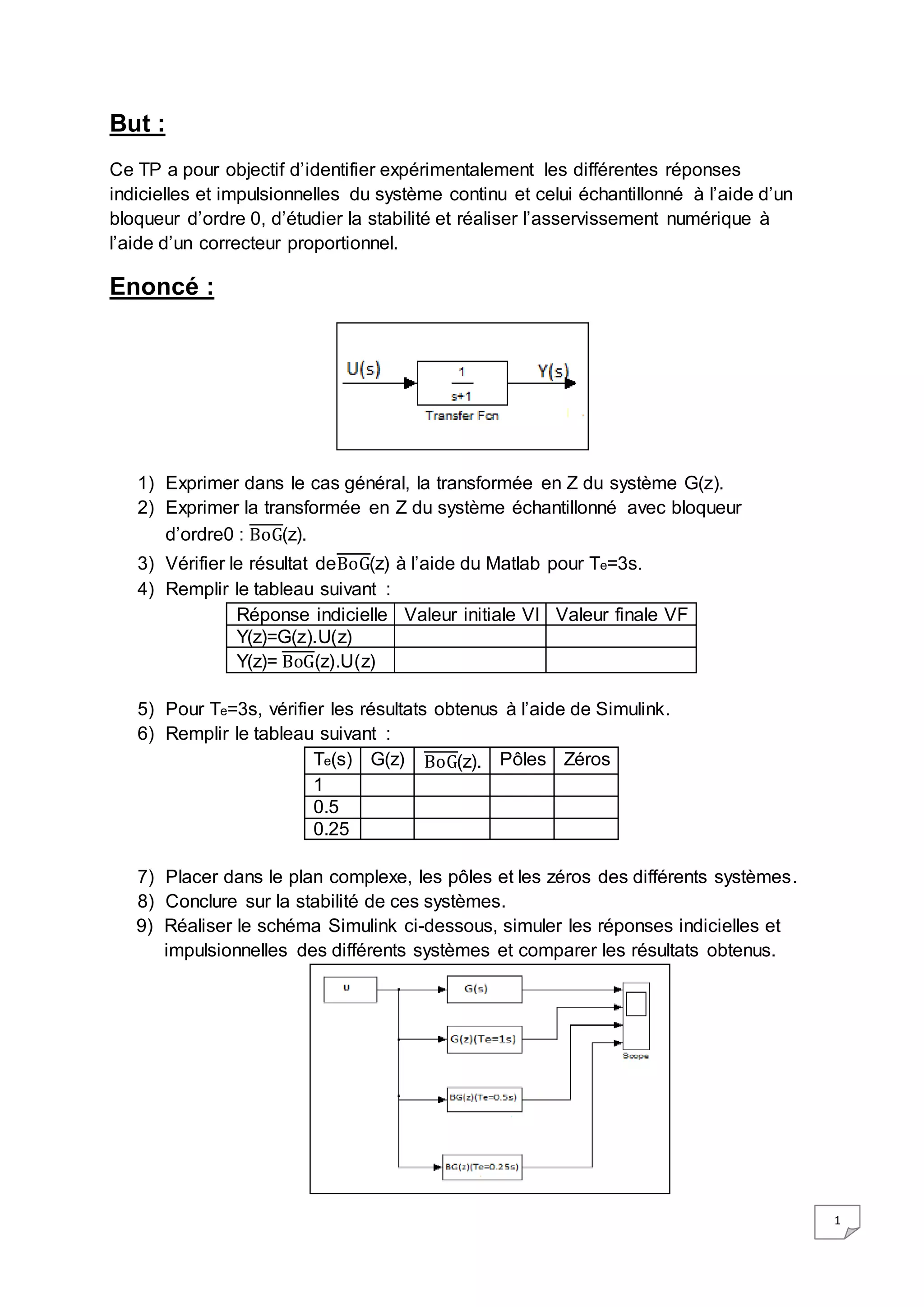
Ce document décrit un travail pratique visant à analyser un système continu et échantillonné à travers des réponses indicielle et impulsionnelle, en utilisant des outils MATLAB et Simulink. Il couvre l'analyse de la stabilité des systèmes et la conception d'un correcteur proportionnel pour le contrôle numérique. Les résultats obtenus montrent que tous les systèmes examinés sont stables, et l'impact du gain sur l'erreur statique est également discuté.

![2
10) Refaire le même travail sur Matlab (utiliser la fonction « subplot »).
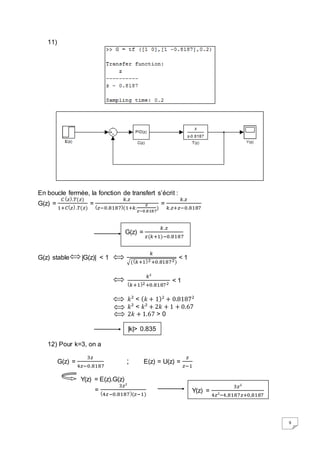
11) On se propose d’asservir numériquement le système G(p).On prend Te=0.2s.
Le correcteur proportionnel est décrit par C(z)=k. Réaliser le schéma simulink
ci-dessous et discuter la stabilité du système échantillonné en boucle fermée
selon les valeurs de k.
12) Pour k=3, on applique un échelon unitaire au système échantillonné. Calculer
et tracer l’allure de Y(z).
13) Déterminer l’erreur statique correspondante 휀(푧) et conclure sur l’action de
correction C(z).
Réponses :
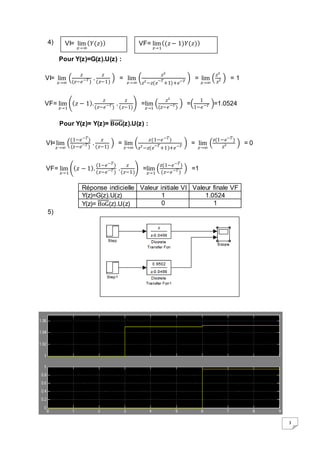
1)
2)
G(z) =
BoG(z) = (1-z-1).Z[
푮(풔)
푺
=
1
(푧−푒−푇 )
푠(푠+1)
푧 (1−푒−푇 )
(푧−1)(푧−푒−푇 )
푧
Ainsi BoG(z) = (1-z-1). 푧(1−푒−푇 )
(푧−1)(푧−푒−푇 )
= (푧−1)(1−푒−푇 )
(푧−1)(푧−푒−푇 )
3) Fonction Matlab:
퐺(푠)
푠
]
BoG(z) = (1−푒−푇)
(푧−푒−푇 )](https://image.slidesharecdn.com/but-141031150215-conversion-gate02/85/But-2-320.jpg)