Télécharger en tant que PDF, PPTX
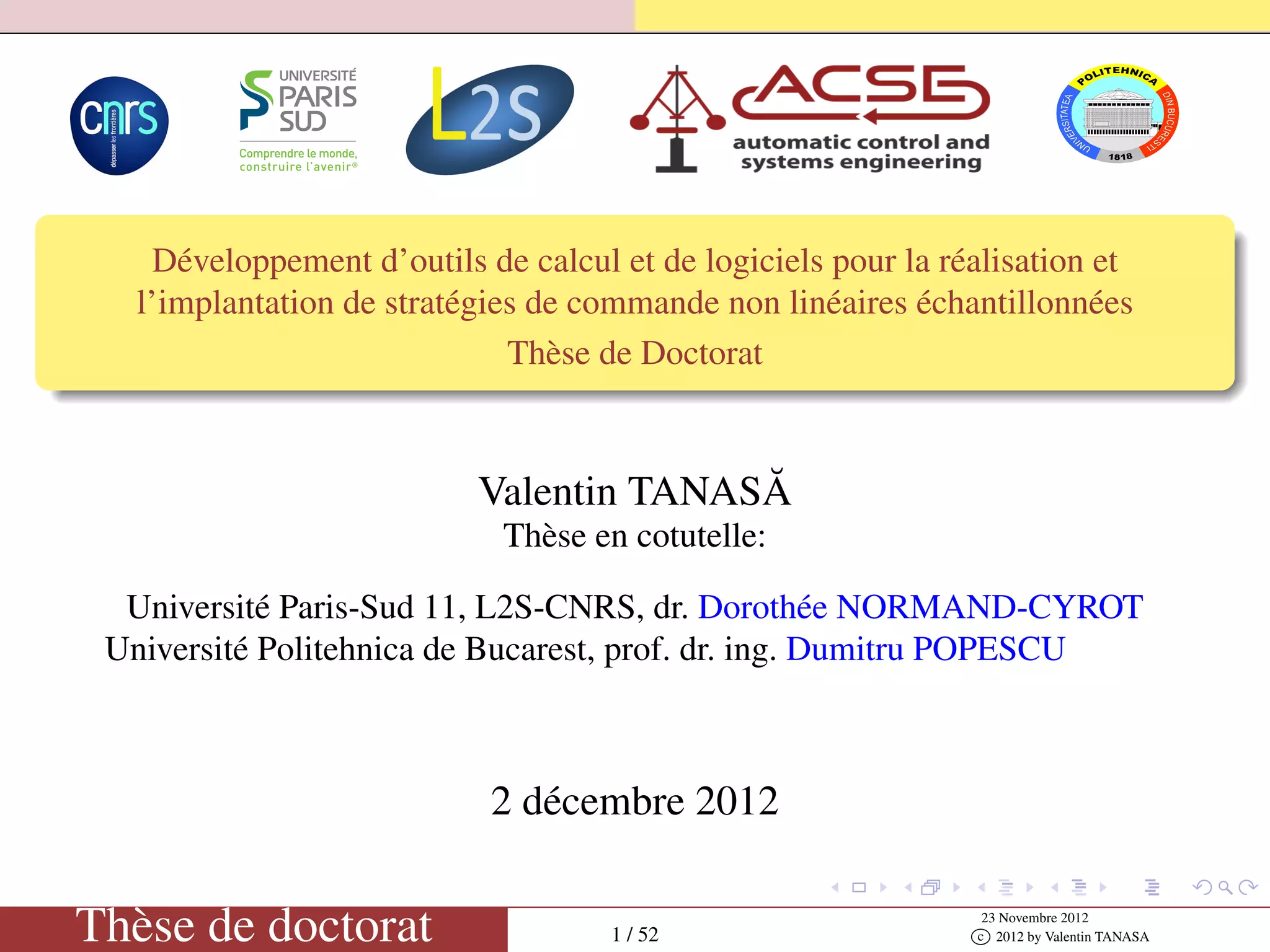

![Introduction Méthodologies de conception
Conception en temps continu
Contrôler en
temps continu
y
x(t)
x(t)
BOZ
Contrôler en
temps discret
Contrôler en
temps discret
x(k)
Schéma en temps continu
Schéma en temps discret
Schéma échantillonné
• La méthode la plus courante - l’émulation d’un contrôleur en temps continu.
L’inconvénient majeur : les performances du contrôleur conçu en temps
continu ne sont pas maintenues.
• Pour compenser les effets d’échantillonnage - “redesign” du contrôleur
continu : procédure de discrétisation de la loi de commande, implémentation
avec de bloqeur d’ordre supérieur, à échelles de temps multiples
[Owen et al., 1990], [Keller and Anderson, 1992], [Clarke et al., 1997],
[Franklin et al., 1998], [Di Giamberardino et al., 1996a],
[Djemai et al., 1999], [Hu and Michel, 1999].
Thèse de doctorat 5 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-5-320.jpg)
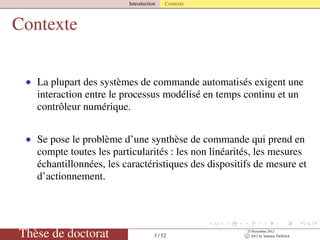
![Introduction Méthodologies de conception
Conception en temps discret
Contrôler en
temps continu
y
x(t)
x(t)
BOZ
Contrôler en
temps discret
Contrôler en
temps discret
x(k)
Schéma en temps discret
Schéma échantillonné
• la conception oublie le comportement entre les instants d’échantillonnage ;
• dans le cas non linéaire le calcul exact de modèles équivalents en temps
discret devient vite très difficile ;
• les propriétés du temps continu sont généralement perdues (linéarisation,
contrôlabilité, observabilité, passivité, stabilisation, etc. [Grizzle, 1986],
[Byrnes and Lin, 1994], [Barbot et al., 1996],
[Monaco and Normand-Cyrot, 2001]
Thèse de doctorat 6 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-6-320.jpg)
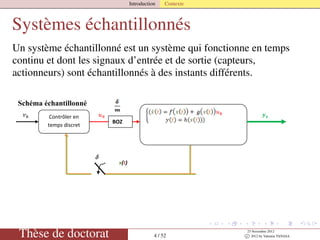
![Introduction Méthodologies de conception
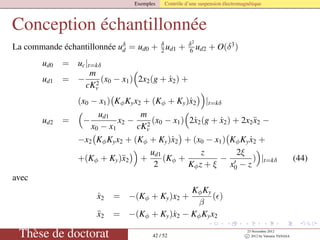
Conception échantillonnée
x(t)
BOZ
Contrôler en
temps discret
Contrôler en
temps discret
x(k)
Schéma en temps discret
Schéma échantillonné
Si la synthèse est basée sur les objectifs fixés en temps continu ou discret :
• Conception directe - objectifs discrets [Di Giamberardino et al., 1996b], [Gennaro, 2002]
• Conception indirecte - objectifs définis en temps continu ;
Selon le modèle échantillonné :
• Conception approchée - basée sur un modèle approché
([Neši´c and Teel, 2004],[Neši´c and Grüne, 2005])
• Conception exacte - basée sur le modèle échantillonné complet (D. Normand-Cyrot et S.
Monaco)
Thèse de doctorat 7 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-7-320.jpg)
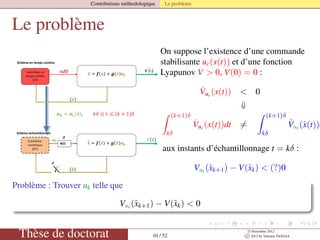
![Contributions méthodologique Le problème
Contexte du problème
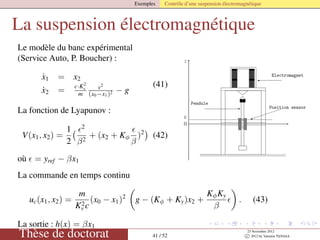
Stabilisation en temps continu au sens de Lyapunov : très utilisé dans
différents contextes : procédure “backstepping” [Krstic et al., 1992],
commande robuste et adaptive, Lyapunov design, passivité,
optimalité, etc.
Thèse de doctorat 11 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-12-320.jpg)

![Contributions méthodologique Des outils mathématiques
Les outils fonctionnels
Etant donné un système Σc
˙x(t) = f(x(t)) + uc(x(t))g(x(t))
uk = uc(x(t)), t ∈ [kδ, (k + 1)δ)
⇒ xk+1 = Fδ
(xk, uk)
où Fδ
(xk, uk) - le modèle discret équivalent avec :
Fδ
(X, uk) = eδ(f+ukg)
(X) = X + δ(Lf + ukLg)(X) +
i≥2
δi
i!
Li
f+ukLg
(X)
• L’opérateur linéaire de Lie : Lf =
n
i=1 fi(·) ∂
∂xi
• Lf h(x) = ∂h
∂x f(x) = dh|xf(x), h une fonction analytique
• composition Lg ◦ Lf (h)|x = Lg(Lf (h))|x
• crochet de Lie [Lf Lg] = Lf ◦ Lg − Lg ◦ Lf = L[f,g] = Ladf
g
Thèse de doctorat 13 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-14-320.jpg)

![Contributions méthodologique La solution échantillonnée - SR
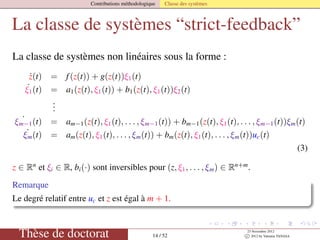
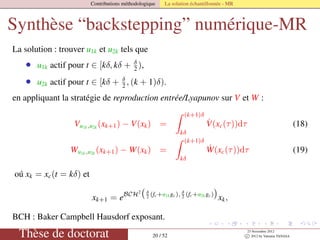
Synthèse “backstepping” numérique-SR
Soit xT
= [zT
y]T
, le système continu transformé, réécrit comme :
˙x(t) = fc(x) + gc(x)uc
avec :
fc =
f(z) + g(z)(φ(z) + y)
a(z, y + φ(z)) − ∂φ(z)
∂z ˙z
gc =
0
b(z, y + φ(z))
. (9)
La solution uk satisfait la reproduction entrée/Lyapunov :
Vuk (xk+1) − V(xk) =
(k+1)δ
kδ
˙V(xc(t))dt (10)
où xk = xc(t = kδ)
On considére le critère d’erreur LME (Lyapunov Matching Error) :
EV(xk) = Vuk
(xk+1) − V(xc|t=(k+1))
Thèse de doctorat 17 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-18-320.jpg)
![Contributions méthodologique La solution échantillonnée - SR
Théorème ([Tiefensee and Tanasa, 2011])
Etant donné le système en temps continu, en supposant l’existence d’un contrôleur de type backstepping,
alors il existe T∗ > 0 tel que ∀δ < T∗, il existe une loi de commande échantillonnée uk = uδ
d
uk = uδ
d = ud0 +
j≥1
δj
(j + 1)!
udj. (11)
qui reproduit V(x(t)) aux instants d’échantillonnage et la stabilisation asymptotique de l’origine.
La stabilisation Lyapunov du système échantillonné est assurée par (Lf + ucLg)V < 0 et uδ
d satisfait la
condition LME = 0 :
Vuk (xk+1) − V(xk) =
(k+1)δ
kδ
(Lf(·) + uc(·)Lg(·))V(x(t))dt < 0
Les premiers termes de uδ
k sont :
ud0(zk, yk) = uc(z, y)|t=kδ commande continue (12)
ud1(zk, yk) = ˙uc(z, y)|t=kδ premier terme correcteur (dérivée)
ud2(zk, yk) = ¨uc(z, y)|t=kδ +
ud1(zk, yk)
2b(z, y + φ(z))y
ad[fc,gc]V|t=kδ.deuxième correcteur (13)
Thèse de doctorat 18 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-19-320.jpg)
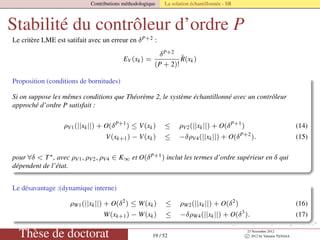
![Contributions méthodologique La solution échantillonnée - MR
Théorème ([Tanasa et al., ])
Etant donné le système en temps continu, en supposant l’existence d’un contrôleur
en temps continu uc(x(t)) de type backstepping, alors il existe T∗
> 0 et il existe
une loi de commande échantillonnée à 2 échelles de temps uik = u
δ/2
id qui reproduit
les évolutions de Lyapunov V, W aux instant d’échantillonnage et assure la
stabilisation asymptotique de l’origine, pour ∀δ < T∗
, avec la commande :
uik = u
δ/2
id = udi0 +
j≥1
δj
2j(j + 1)!
udij, i = 1, 2 (20)
Les premiers termes de u
δ/2
ik sont :
(ud10, ud20) = ( uc|xk
, uc|xk
) (21)
(ud11, ud21) = (
2
3
˙uc
xk
,
10
3
˙uc
xk
) (22)
ud12 =
4
3
˙uc 4ucL2
gc
Lfc + Lgc L2
fc
W · (Lgc Lfc W)−1
− 6˙ucucLgc V · (Lgc V)−1
|xk
ud22 = 8˙uc + 12˙ucucLgc V · (Lgc V)−1
− ud12|xk .
Thèse de doctorat 21 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-22-320.jpg)
![Contributions méthodologique La solution échantillonnée - MR
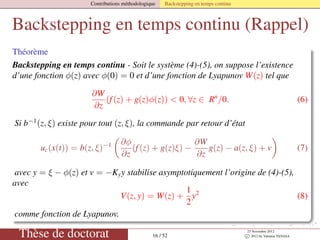
Stabilité du contrôleur 2-rate d’ordre P
Le critère LME est satifait avec un erreur en δP+2 pour V respectivement en δP+3 pour W.
Proposition (conditions des bornitudes)
Supposant les conditions du Théorème 2, le systéme échantillonné avec un contrôleur 2-rate, approché
d’ordre P satisfait :
ρV1(||xk||) + O(δP+1
) ≤ V(xk) ≤ ρV2(||xk||) + O(δP+1
) (23)
V(xk+1) − V(xk) ≤ −δρV4(||xk||) + O(δP+2
). (24)
respectivement
ρW1(||xk||) + O(δP+2
) ≤ W(xk) ≤ ρW2(||xk||) + O(δP+2
) (25)
W(xk+1) − W(xk) ≤ −δρW4(||xk||) + O(δP+3
). (26)
pour ∀δ < T∗, avec ∀ρ· ∈ K∞ et O(δP+1) inclut les termes d’ordre supérieur en δ qui dépendent de
l’état.
Cette solution peut être comparée à la solution avec bloqueur d’ordre supérieur [Barbot et al., 1996]
Thèse de doctorat 22 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-23-320.jpg)
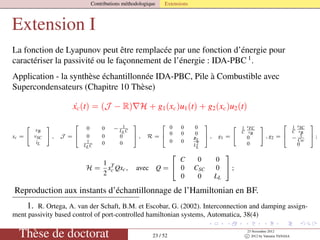
![Contributions méthodologique Extensions
Extension - II - Stabilité et optimalité
J(x) =
∞
0
l(x) + uT
R(x)u dt
On considère en parallèle le critère d’optimalité et la stabilisation, avec
l’Hamiltoniene H :
Hc(x, u) :=
∂V(x)
∂x
˙x + l(x) + uT
R(x)u (27)
Se pose le problème de trouver le contrôleur échantillonné qui préserve les deux
propriétes : optimalité et stabilisation
Une première solution [Tanasa et al., 2012] 2
représente une version non linéaire du
résultat [Halanay and R˘asvan, 1977] 3
.
2. Tanasa, V. ; Monaco, S. & Normand-Cyrot, C. Nonlinear optimal stabilizing control under sam-
pling 51th Conference on Decision and Control (CDC), Maui, Hawaii, 2012
3. Halanay, A. & Rãsvan, V. General theory of linear hybrid control Int. Journal of Control, 1977,
26, 621-634
Thèse de doctorat 24 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-25-320.jpg)
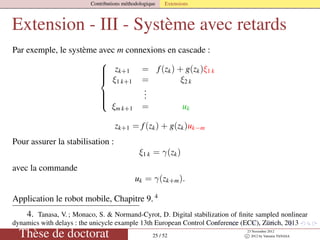
![Contributions méthodologique Extensions
Extension - IV
L’étude sur la “robustesse” de la solution échantillonnée vis à vis des erreurs de
quantification (Chapitre 11) 5
:
˙x = f(x) + (uk( ˜xk) + uk
) g(x) (28)
• ˜xk- erreurs à cause du convertisseur analoque-numérique.
• uk - erreurs à cause des calculs.
Différentes approches : systèmes avec des perturbations bornées, “quantized
feedback” [Liberzon, 2001].
5. Tanasa V., Normand-Cyrot D., Popescu D. -" Quantization errors in sampled-
data systems with backstepping controllers", UPB Scientific Buletin, Series A (sou-
mis)
Thèse de doctorat 26 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-27-320.jpg)

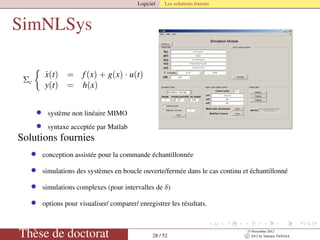



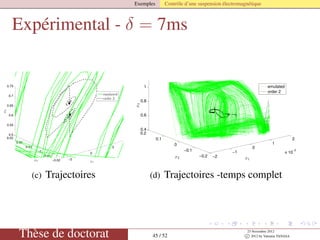
![Exemples Étude comparative
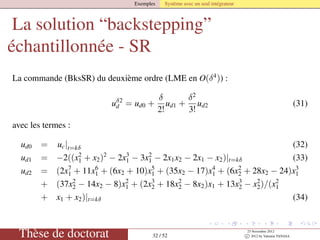
Étude comparative
BksNe1
Contrôleur approché d’ordre 1 [Neši´c and Teel, 2006] - synthèse directe sur
l’approximation Euler du modèle continu.
BksNe2
Contrôleur approché d’ordre 2 [Neši´c and Grüne, 2005] -“redesign” Lyapunov ; la
solution minimise le critère LME. Le contrôleur approché d’ordre 1 coïncide avec
la solution BksSR1.
BksBu1,BksBu2
Contrôleurs approchés d’ordre 1 et 2 [Burlion et al., 2006] - synthèse sur une
approximation d’ordre supérieur du modèle continu.
Thèse de doctorat 36 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-39-320.jpg)




![Contributions
CONFERENCE - WITH PEER REVIEW
[C11] Tanasa V., Monaco S., Normand-Cyrot D. -Digital stabilization of finite sampled nonlinear dynamics with delays : the unicycle
example, 13th European Control Conference (ECC), Zürich, July 17-19, 2013 (submitted).
[C10] Monaco S., Normand-Cyrot D. and Tanasa V. - Digital stabilization of delayed-input strict-feedforward dynamics, 51th
Conference on Decision and Control (CDC), Maui, Hawaii, December 10-13, 2012.
[C09] Tanasa V., Monaco S., Normand-Cyrot D. - Nonlinear optimal stabilizing control under sampling, 51th Conference on Decision
and Control (CDC), Maui, Hawaii, December 10-13, 2012.
[C08] Hilairet M.,Tanasa V., Bethoux O., Normand-Cyrot D. -A passivity-based controller with charge estimation for coordination of
converters in a fuel cell System ; experimental results. 8th PPPSC (Power Plant and Power Systems Control) symposium,
Toulouse, France, September 3-5, 2012.
[C07] Udrea A., Ticlea A.,Tanasa V., Flutur C. - Necessary conditions for solving the nonlinear MIMO output regulation problem,
20th Mediterranean Conference on Control and Automation, Barcelona, Spain, 2012.
[C06] Tanasa V. and Normand-Cyrot D. - "Sur la gestion échantillonée de lénergie d’un système - pile à combustible-super
condensateurs"- Septième Conférence Internationale Francophone d’Automatique, Grenoble, 4-7 July, France, page(s) :
727-732, 2012.
[C05] Tanasa V. and Calofir V. - "A sampled-data level control of nonlinear coupled-tanks"- AQTR, May 24-27, Cluj, Romania, 2012,
ISBN 978-1-4673-0703-1.
[C04] Tanasa V. and Normand-Cyrot D. - Experimental digital control of a magnetic suspension. American Control Conference
(ACC), Montréal, Canada, pages : 3956-3961, 2012, ISBN 978-1-4577-1094-0.
[C03] Tanasa V. and Normand-Cyrot D. - "A computer aided software for nonlinear digital control", Post-proceedings of 13th
International Symposium on Symbolic and Numeric Algorithms for Scientific Computing, Timisoara, page(s) : 52-62, 2011,
ISBN 978-0-7695-4630-8.
[C02] Tiefensee F. and Tanasa V. - "Digital implementation of backstepping controllers via input/Lyapunov matching", In :
Proceedings of the 18th IFAC World Congress, Milano,Vol. 18, page(s) : 3421-3426, 2011, ISBN : 978-3-902661-93-7.
[C01] Tanasa V. and Tiefensee F.- "Un logiciel de commande non linéaire échantillonnée", In : Proceedings of 6ème Conférence
Internationale Francophone d’ Automatique, Nancy, France, 2010.
JOURNAL
[S1] Tanasa V., Normand-Cyrot D., Monaco S. - "Sampled-data backstepping via Lyapunov matching" , full paper, IEEE TAC
(submitted).
[S2] Tanasa V., Normand-Cyrot D., Popescu D. -" Quantization errors in sampled-data systems with backstepping controllers", UPB
Scientific Buletin, Series A(submitted)
[S3] Udrea A., Ticlea A.,Tanasa V., Flutur C. - "On the nonlinear output regulation problem - Part 1 - MIMO nonlinear systems
normal forms and a discussion on the necessary conditions for solving the control problem"’, UPB Scientific Buletin, Series A,
Nr. 4, 2012.
Thèse de doctorat 51 / 52
23 Novembre 2012
c 2012 by Valentin TANASA](https://image.slidesharecdn.com/8a7f17a8-9848-418c-88dd-e3b70c1936e0-150221145003-conversion-gate01/85/TV_Soutenance_2012-67-320.jpg)


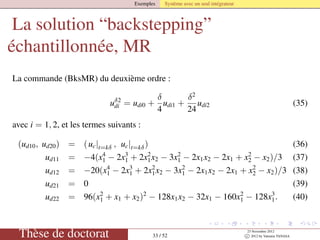
Cette thèse de doctorat aborde le développement d'outils de calcul et de logiciels pour la conception de stratégies de commande non linéaires échantillonnées. Elle explore les défis liés à l'échantillonnage dans les systèmes de contrôle, en proposant des méthodologies pour maintenir la performance des contrôleurs en temps discret. Les contributions incluent des techniques de stabilisation basées sur la méthode de backstepping et l'utilisation d'outils mathématiques pour optimiser les systèmes non linéaires.






















































